Управление манипулятором – Как управлять краном манипулятором? Рекомендации, которые позволят быстро научиться управлению крупногабаритной техникой.
Как управлять манипулятором
Манипуляторы — это своеобразные устройства, которые можно установить на определенный тип грузового автомобиля. Они позволяют оптимизировать работу, выполняя ее вместо человека.

Существует огромное количество организаций, которые предоставляют услуги таких механизмов. Сегодня можно даже нанять газель с краном манипулятором, что очень часто применяется для погрузки тяжелых и габаритных товаров.
Виды манипуляторов
Данные виды механизмов имеют различное строение и могут использовать для решения различных задача. Их можно разделить на несколько видов:
- Торсовые краны представляют собой простые механизмы, где основным рабочим органом является стрела с определенным рабочим органом. Такие механизмы легко разворачиваются вокруг своей оси, что делает их практически универсальными. Они очень часто используются для перемещения грузов в котлованах, ямах или колодцах.
- Гидравлические манипуляторы очень широко используемые устройства. Их можно встретить как на лесовозах, так и на грузовых автомобилях, занимающихся перевозкой металла. Строение такого механизма немного отличается от предыдущего вида наличием ломаной стрелы. Это позволяет осуществлять погрузку или разгрузку товара с кузова автомобиля.

Учимся управлять
В первую очередь, перед тем как приступать к изучению управлением манипулятора, следует проверить на исправность всех основных механизмов автомобиля:
- тормозов;
- ходовой части;
- тяговых и буферных систем.
Следующим шагом является изучение инструкции по управлению манипулятором. Она должна присутствовать практически для каждого вида устройства. Затем следует приступать к наработке навыков изделием.
Существует огромное количество нюансов, которые следует учитывать при выполнении таких работ:
- Транспортировать грузы можно только при отсутствии на рабочей площадке людей.
- Вес товара должен соответствовать возможностям устройства. Не следует надеяться, что кран сможет выдержать и поднять несколько большой вес. На это также влияет вылет стрелы, которая чем дальше, тем меньше сможет поднять.
- При работе с манипуляторами следует придерживаться основных правил безопасности, чтобы не повредить механизм, а также не причинить вред окружающим.
Управление манипулятором это своеобразное искусство, которое требует хороших навыков. Усовершенствуйте их и вы будете выполнять такие работы очень качественно и уверенно.
Инструкция по управлению КМУ — в этом видео:
myogorod.ru
Как управлять манипулятором | Психология отношений
Как управлять краном манипулятором?
Вряд ли стоит говорить о том, что в большинстве случаев кран-манипулятор становится идеальным решением. Речь идёт о плотной городской застройке или локации, куда обыкновенный кран проехать не в состоянии.
Манипулятор в Москве поможет выполнить эвакуацию автомобиля в самые короткие сроки.

Кран манипуляторы предназначены для самых разнообразных работ. В пример можно привести следующие:

Каждый рабочий, который собирается работать на кране-манипуляторе в обязательном порядке должен пройти полное обучение. Речь идёт о том, что к каждому автомобилю прилагается подробная инструкция.
Однако существуют и более радикальные методы. Подразумеваются специальные курсы для водителей кранов-манипуляторов. На них любой желающий может понять на практике работу следующих систем: система безопасности, тяговая, буферная, тормозная, ходовая и т.д.
На самом деле управление манипулятором не такая сложная задача, как может показаться в начале. Хотя в обязательном порядке, водитель крана манипулятора должен не только видеть, но и чувствовать габариты автомобиля, стрелы и т.д.

Несмотря на то, что стрела крана-манипулятора значительно меньше, чем у традиционного крана, она может привести к несчастным случаям на строительных площадках и не только.
По этой причине, перед тем, как приступить непосредственно к работе на манипуляторе в обязательном порядке подаётся звуковой сигнал. Если люди находятся рядом с краном, они отойдут.
Кроме того, не стоит забывать о том, что не всегда придется использовать манипулятор на твёрдом асфальте. В инструкции к автомобилю будут прописаны инструкции в отношении использования последнего на краю котлована, или на болотистом, сыпучем грунте.
Как правило, основа автомобиля выполняется на базе хорошо известного грузовика. К примеру, КамАЗ пройдёт практически всюду. Вряд ли стоит напоминать о том, что манипуляторы активно используются на лесозаготовке.
Настоящие профессионалы могут использовать два манипулятора для погрузки габаритного груза на платформу грузового автомобиля. Между тем, управление манипулятором в этом плане становится целым искусством.
На видео будет продемонстрирован процесс управления классическим манипулятором. Специалист не только демонстрирует процесс, но и даёт ценные указания:
Как управлять манипулятором
Манипуляторы — это своеобразные устройства, которые можно установить на определенный тип грузового автомобиля. Они позволяют оптимизировать работу, выполняя ее вместо человека.

Существует огромное количество организаций, которые предоставляют услуги таких механизмов. Сегодня можно даже нанять газель с краном манипулятором, что очень часто применяется для погрузки тяжелых и габаритных товаров.
Данные виды механизмов имеют различное строение и могут использовать для решения различных задача. Их можно разделить на несколько видов:
- Торсовые краны представляют собой простые механизмы, где основным рабочим органом является стрела с определенным рабочим органом. Такие механизмы легко разворачиваются вокруг своей оси, что делает их практически универсальными. Они очень часто используются для перемещения грузов в котлованах, ямах или колодцах.
- Гидравлические манипуляторы очень широко используемые устройства. Их можно встретить как на лесовозах, так и на грузовых автомобилях, занимающихся перевозкой металла. Строение такого механизма немного отличается от предыдущего вида наличием ломаной стрелы. Это позволяет осуществлять погрузку или разгрузку товара с кузова автомобиля.

В первую очередь, перед тем как приступать к изучению управлением манипулятора, следует проверить на исправность всех основных механизмов автомобиля:
Следующим шагом является изучение инструкции по управлению манипулятором. Она должна присутствовать практически для каждого вида устройства. Затем следует приступать к наработке навыков изделием.
Существует огромное количество нюансов, которые следует учитывать при выполнении таких работ:
- Транспортировать грузы можно только при отсутствии на рабочей площадке людей.
- Вес товара должен соответствовать возможностям устройства. Не следует надеяться, что кран сможет выдержать и поднять несколько большой вес. На это также влияет вылет стрелы, которая чем дальше, тем меньше сможет поднять.
- При работе с манипуляторами следует придерживаться основных правил безопасности, чтобы не повредить механизм, а также не причинить вред окружающим.
Управление манипулятором это своеобразное искусство, которое требует хороших навыков. Усовершенствуйте их и вы будете выполнять такие работы очень качественно и уверенно.
Инструкция по управлению КМУ — в этом видео:
Источники:
Как управлять краном манипулятором
Вряд ли стоит говорить о том, что в большинстве случаев кран-манипулятор становится идеальным решением. Речь идёт о плотной городской застройке или локации, куда обыкновенный кран проехать не в состоянии. Манипулятор в Москве поможет выполнить эвакуацию автомобиля в самые короткие сроки. Кран
http://yakauto.ru/kak-upravlyat-kranom-manipulyatorom/
Как управлять манипулятором
Манипуляторы — это своеобразные устройства, которые можно установить на определенный тип грузового автомобиля. Они позволяют оптимизировать работу, выполняя ее вместо человека. Существует огромное количество организаций, которые предоставляют услуги таких механизмов. Сегодня можно даже нанять
http://myogorod.ru/inventar-i-prisposobleniya/kak-upravlyat-manipulyatorom.html
psiholog4you.ru
Устройство управления манипулятором
Использование: в погрузочно-разгрузочных механизмах, а именно в манипуляторах, главным образом, для лесной промышленности и может быть использовано как на лесозаготовительных машинах при валке, трелевке и пакетировании леса, так и на агрегатах для лесосплава для подъема затонувшей, полузатонувшей и плавающей древесины и ее пакетирования. Сущность изобретения: в устройстве, содержащем шарнирно сочлененные поворотную колонну, стрелу с исполнительным механизмом в виде клещевого захвата, их гидропривода, а также гидравлическую систему управления, включающую гидрораспределители, и кинематически связанную с ней механическую систему управления, последняя выполнена в виде двух рукояток, установленных с возможностью трехкоординатного перемещения, каждая из которых одновременно связана с гидрораспределителями по числу степеней подвижности управляемых механизмов, и двух педалей, каждая из которых связывает рабочие полости гидропривода соответствующего механизма стрелы непосредственно со сливом, осуществляя гидравлическое отключение от гидрораспределителей, управляемых рукоятками. 3 ил.
Изобретение относится к грузоподъемным механизмам, а именно к манипуляторам для лесной промышленности, и может быть использовано как на лесозаготовительных машинах при валке, пакетировании и трелевке леса, так и на агрегатах для лесосплава для подъема затонувшей, полузатонувшей и плавающей древесины и ее пакетирования.
Известное устройство – кран-манипулятор на авт. N 484172 (кл. B 66 C 23/06, 13/42, приор. 08.07.69, опубл. 15.09.75), содержащее поворотную в вертикальной плоскости стрелу с рукоятью и захватным рабочим органом, их гидроприводы и систему управления, включающую трехпозиционный гидрораспределитель, кинематически связанный с тремя рычагами управления. Известное устройство обеспечивает поочередное выполнение операций подъема и опускания захватного рабочего органа за счет поворота стрелы в вертикальной плоскости и перемещение его по одной координате, например, перемещение бревен по горизонтали для погрузки на эстакаду, транспортер и т.п., т. е. работает только в активном режиме (от руки оператора) с ограниченной степенью подвижности управляемых механизмов. Известно устройство управления машиной манипуляторного типа по авт. св. N 701792 (кл. B 25 J 13/00, E 02 F 9/22, B 66 C 13/48, A 01 G 23/08, приор. 21.06.78, опубл. 05.12.79) – прототип. Известное устройство содержит шарнирно сочлененные поворотную колонну, стрелу с установленным на ней пантографным механизмом, рукоять, приводы их перемещения в виде гидроцилиндров, управляемых от гидрораспределителей, а именно двух трехпозиционных золотников, связанных с тремя рычагами управления, снабженными фиксаторами положений, кинематически также связанными с кулачком, установленным на поворотной колонне, с которым также связан пантографный механизм. Увеличение – уменьшение вылета стрелы, остановка его, остановка поворота колонны, операции выгрузки осуществляются оператором при помощи ручного управления рычагами, связанными с соответствующими гидрораспределителем. Настройкой определенного перекрытия по времени движений управляемых механизмов оператор может добиться плавного, без рывков переключения звеньев рабочего оборудования, что, соответственно, требует хорошей квалификации оператора. Известное устройство позволяет использовать все степени подвижности управляемых механизмов (поворотной колонны, стрелы с рукоятью) при помощи трех рычагов управления. Однако такая механическая система управления имеет недостатки. Наличие трех рычагов управления не дает возможности разгрузить внимание оператора, облегчить его работу. Кроме того, управление машиной манипуляторного типа производится только в активном режиме (от руки оператора), что в определенных условиях работы, особенно в тяжелых, неадаптированных к условиям ограниченности степеней манипулирования объектами – бревнами, хлыстами, расположенными неупорядоченно, может привести к заклиниванию и т.п., т.е. снижает надежность работы машины манипуляторного типа в целом. Целью предлагаемого изобретения является не только обеспечение возможности активного режима управления манипулятором с использованием всех степеней подвижности управляемых механизмов, но и адаптация к условиям ограниченности степеней манипулирования объектами, т.е. возможность работы механизмов стрелы-плеча, предплечья в пассивном режиме за счет гидравлического отключения от соответстующих гидрораспределителей. Для достижения этой цели в устройстве управления манипулятором, содержащем шарнирно сочлененные поворотную колонну, стрелу с исполнительным механизмом, их гидроприводы, а также гидравлическую систему управления, включающую гидрораспределители, и кинематически связанную с нею механическую систему управления, последняя выполнена в виде двух рукояток, осуществляющих трехкоординатное управление за счет одновременной связи с гидрораспределителями по числу степеней подвижности управляемых механизмов, и двух педалей, осуществляющих гидравлическое отключение, т. е. управление пассивным, или плавающим, режимом работы, за счет непосредственного соединения рабочих полостей гидропривода соответствующего управляемого механизма стрелы (плеча или предплечья) со сливом. На фиг. 1 представлено устройство – манипулятор с исполнительным механизмом в виде захвата клещевого типа; на фиг. 2 – кинематическая схема рукоятки механической системы управления; на фиг. 3 – гидравлическая схема устройства в целом. Устройство-манипулятор, представленное на фиг. 1, содержит шарнирно сочлененные колонну 1, состоящую из плеча 2 и предплечья 3 с выдвижной частью 4, привод 5 поворота колонны 1, гидропривод 6, обеспечивающий подъем-опускание плеча 2, гидропривод 7 с рычажным механизмом 8, обеспечивающий подъем-опускание предплечья 3, привод 9 вращения захвата 10. Гидроприводы выдвижной части 4 предплечья 3 и сведения-разведения клещевого захвата 10 на фиг. 1 не показаны. На фиг. 2 представлена кинематическая схема рукоятки механической системы управления, установленной с возможностью перемещения по трем координатам. Рукоятка управления содержит основание 11, рамку 12, установленную на осях 13 на основании 11, рамку 14, установленную на осях 15 в рамке 12, направляющую 16, неподвижно соединенную с рамкой 14. В направляющей 16 с возможностью поступательного перемещения размещен шток 17 с ручкой 18, имеющий на свободном конце проушину, в которую входит ролик рычага 19. Рычаг 19 закреплен на оси на рамке 12 и связан с тягой 20, которая, в свою очередь, связана с Z-образным рычагом 21, закрепленным на основании 11, последний посредством тяги 22 связан с гидрораспределителями, управляющими движением по оси Z при перемещении ручки вверх или вниз. Рамка 12 посредством тяги 23 связана с гидрораспределителями, управляющими движением по оси Y при перемещении ручки 18 вправо или влево. Рамка 14 посредством тяги 24 связана с гидрораспределителями, управляющими движением по оси X при перемещении ручки 18 вперед или назад. Гидравлическая схема устройства, представленная на фиг. 3, содержит гидравлические цепи привода 5 поворота колонны 1, гидропривода (гидроцилиндра) 6 плеча 2, гидропривода (гидроцилиндра) 7 предплечья 3, привода 9 вращения захвата 10, гидропривода (гидроцилиндра) 25 выдвижной части 4 предплечья 3, гидропривода (гидроцилиндра) 26 сведения-разведения челюстей захвата 10, связанных в параллель с напорной линией и линией слива в сливной бак (на фиг. не показан). Гидравлическая цепь привода 5 поворотной колонны 1 содержит гидромотор 27, связанный через предохранительные клапаны 28 с трехпозиционным золотниковым гидрораспределителем 29, кинематически связанным с правой рукояткой 30 (ось Y на фиг. 2).Формула изобретения
Устройство управления манипулятором, содержащее шарнирно сочлененные поворотную колонну, стрелу с исполнительным механизмом, их гидроприводы, а также гидравлическую систему управления, включающую гидрораспределители, и кинематически связанную с ней механическую систему управления, отличающееся тем, что механическая система управления выполнена в виде двух рукояток, установленных с возможностью перемещения по трем координатам, каждая из которых одновременно связана с гидрораспределителями по числу степеней подвижности соответствующих ей управляемых механизмов, и двух педалей, посредством которых рабочие полости гидропривода соответствующего механизма стрелы сообщены непосредственно со сливом.РИСУНКИ
Рисунок 1, Рисунок 2, Рисунок 3www.findpatent.ru
Лекция 16 Управление манипуляторами промышленного робота
122
Если динамические уравнения движения манипулятора заданы, целью управления манипулятором является выполнение им движений в соответствии с заданным рабочим критерием.
Проблема управления манипулятором в общем случае сводится к следующим шагам:
к получению его динамических моделей;
к определению закона управления им на основе этих моделей для обеспечения требуемых рабочих и динамических характеристик системы.
Движение манипулятора осуществляется в два этапа:
транспортное движение манипулятора в зону действия;
управление (коррекция) движением по сигналам датчиков обратной связи.
Рассматривая управление манипулятором как задачу формирования траектории движения (рис. 16.1), управление движением можно подразделить на три основных вида:
1. Управление движением сочленений манипулятора.
Сервомеханизм звена (схема управления манипулятором робота Пума).
Метод вычисления моментов.
Оптимальное по быстродействию управление.
Управление переменной структурой.
Нелинейное независимое управление.
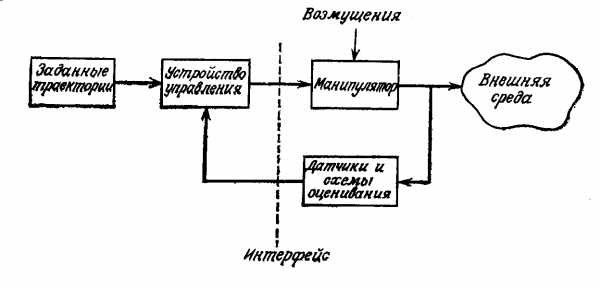
Рисунок 16.1. Общая блок-схема управления манипулятором робота
2. Программное управление движением в декартовом пространстве по скорости, ускорению и силе.
3. Адаптивное управление.
Адаптивное управление по заданной модели.
Самонастраивающееся адаптивное управление.
Адаптивное управление по возмущению с компенсацией по прямой связи.
Адаптивное управление программным движением.
Предполагается, что движение вдоль траектории в связанной или декартовой системе координат является функцией времени.
Метод вычисления управляющих моментов
Если движение манипулятора описывается уравнением Лагранжа-Эйлера или Ньютона-Эйлера, задачей управления является нахождение управляющих моментов и сил. Эти моменты и силы должны обеспечивать максимально приближенное к заданной траектории движение конечного звена манипулятора в реальном времени.
Передаточная функция одного сочленения робота
Промышленные роботы имеют электрические, гидравлические или пневматические приводы. Чаще всего каждое сочленение манипуляторов оснащается электродвигателями постоянного тока с независимым возбуждением. Особенности такого привода – высокая мощность, плавность хода, регулируемость, линейность нагрузочной характеристики и небольшие постоянные времени.
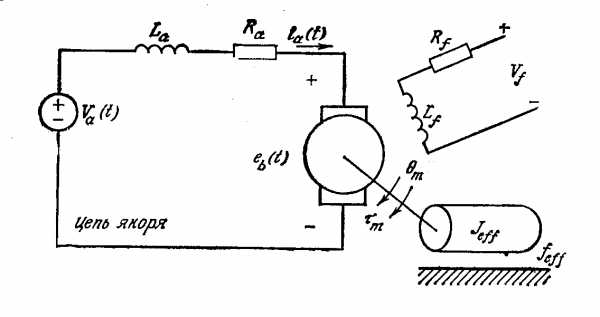
Рисунок 16.2. Эквивалентная схема двигателя постоянного тока
с управлением в цепи якоря
Основными переменными величинами в этой схеме являются следующие:
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
 –
напряжение
якоря, В;
–
напряжение
якоря, В; –
момент, развиваемый двигателем, Н·м;
–
момент, развиваемый двигателем, Н·м; –
напряжение поля, В;
–
напряжение поля, В; –
угловое перемещение вала двигателя, рад;
–
угловое перемещение вала двигателя, рад; –
индуктивность якоря, Гн;
–
индуктивность якоря, Гн; –
угловое перемещение вала нагрузки, рад;
–
угловое перемещение вала нагрузки, рад; –
индуктивность поля, Гн;
–
индуктивность поля, Гн; –
момент инерции двигателя, при-веденный
к валу двигателя,;
–
момент инерции двигателя, при-веденный
к валу двигателя,; –
сопротивление якоря, Ом;
–
сопротивление якоря, Ом; –
коэффициент вязкого трения двигателя,
приведенный к валу двигателя,
;
–
коэффициент вязкого трения двигателя,
приведенный к валу двигателя,
; –
сопротивление поля, ОМ;
–
сопротивление поля, ОМ; –
момент инерции нагрузки, приведенный
к валу нагрузки,
;
–
момент инерции нагрузки, приведенный
к валу нагрузки,
; –
ток якоря, А;
–
ток якоря, А; -коэффициент
вязкого трения нагрузки, приведенный
к валу нагрузки,
;
-коэффициент
вязкого трения нагрузки, приведенный
к валу нагрузки,
; –
ток поля, А;
–
ток поля, А; -число
зубьев редуктора двигателя;
-число
зубьев редуктора двигателя; –
электродвижущая сила, В;
–
электродвижущая сила, В; -число
зубьев редуктора нагрузки.
-число
зубьев редуктора нагрузки.Как следует из схемы системы передач, (рис.16.3) общее линейное перемещение редукторов при их взаимодействии одинаково, т.е.:
 и
и  ,
(16-1)
,
(16-1)
где  и
и  -соответственно
радиусы взаимодействующих шестерен
внутреннего и внешнего редуктора.
-соответственно
радиусы взаимодействующих шестерен
внутреннего и внешнего редуктора.
Или (через число зубьев):
, (16-2)
или 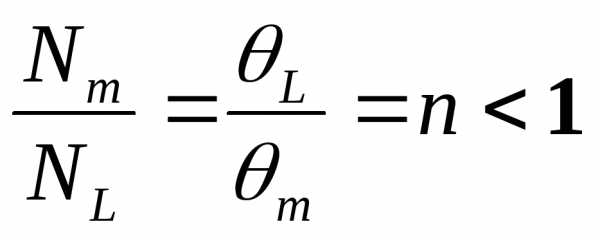 ,
(16-3)
,
(16-3)
где n–
передаточное отношение, связывающее  и
и следующим образом:
следующим образом:
. (16-4)
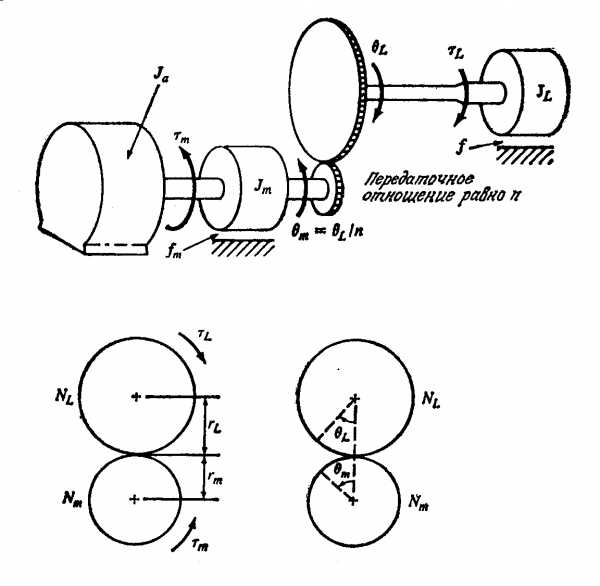
Рисунок 16.3. Анализ системы механической передачи
Продифференцировав два раза, получим:
(16-5)
и . (16-6)
Если нагрузка подсоединена к внешнему редуктору, момент, обеспечиваемый выходным валом двигателя, равен сумме моментов, потребляемых двигателем и нагрузкой.
Таким образом:
(16-7)
или в другой форме:
. (16-8)
Момент нагрузки, приведенный к валу нагрузки, равен:
, (16-9)
а момент двигателя, отнесенный к валу двигателя, равен:
. (16-10)
По закону
сохранения энергии работа, производимая
нагрузкой, приведенная к валу нагрузки  ,
должна равняться работе, приведеной к
валу двигателя
,
должна равняться работе, приведеной к
валу двигателя .
Из этого следует, что:
.
Из этого следует, что:
. (16-11)
С учетом уравнений (16-9), (16-5) и (16-6) имеем:
. (16-12)
Используя уравнения (16-10) и (16-12), запишем выражение для момента, развиваемого выходным валом двигателя:
(16-13)
где – суммарный эффективный момент инерции двигателя и нагрузки, приведенной к валу двигателя;
– суммарный коэффициент ввязкого трения двигателя и нагрузки, приведенной к валу двигателя.
Основываясь на полученных выше результатах, можно определить передаточную функцию рассматриваемой системы одного сочленения манипулятора. Поскольку момент на валу двигателя линейно зависит от тока якоря и не зависит от скорости и углового положения, получим:
, (16-14)
где  –
коэффициент пропорциональности, имеющий
размерность
–
коэффициент пропорциональности, имеющий
размерность .
.
Используя закон Кирхгофа для контура якоря, получим:
, (16-15)
где  –
электродвижущая сила, пропорциональная
угловой скорости двигателя:
–
электродвижущая сила, пропорциональная
угловой скорости двигателя:
, (16-16)
а  –
коэффициент пропорциональности, имеющий
размерность
–
коэффициент пропорциональности, имеющий
размерность .
.
Производя
преобразование Лапласа над полученными
уравнениями и решая их относительно  ,
получим:
,
получим:
. (16-17)
В результате выполнения преобразования Лапласа над уравнением (16-13), имеем:
. (16-18)
Производя
преобразование Лапласа над уравнением
(16-14) и подставляя в него значения  из уравнения (16-17), получим:
из уравнения (16-17), получим:
. (16-19)
Приравнивая уравнения (16-18) и (16-19) и группируя члены, получаем передаточную функцию от напряжения якоря к угловому перемещению вала двигателя:
. (16-20)
Так как величина
постоянной времени двигателя, обусловленная
электрическим взаимодействием, намного
меньше ее величины, обусловленной
механическими факторами, можно пренебречь
влиянием индуктивности якоря  .
Это позволяет упростить предыдущее
уравнение:
.
Это позволяет упростить предыдущее
уравнение:
 ,
(16-21)
,
(16-21)
где  –
передаточный коэффициент двигателя;
–
передаточный коэффициент двигателя;
 – постоянная времени
двигателя.
– постоянная времени
двигателя.
Поскольку
выходом системы управления является
угловое перемещение сочленения  ,
используя уравнение (16-4) и его преобразование
Лапласа, можно отнести угловое положение
сочленения
,
используя уравнение (16-4) и его преобразование
Лапласа, можно отнести угловое положение
сочленения к
напряжению якоря
к
напряжению якоря  ,
т.е.:
,
т.е.:
. (16-22)
Уравнение (16-22) является передаточной функцией одного сочленения манипулятора, связывающей прикладываемое напряжение с угловым перемещением сочленения. Блок-схема системы показана на рис. 16.4.
Рисунок 16.4. Передаточная функция разомкнутой системы одного сочленения манипулятора робота
studfiles.net
Управление манипулятором с переменной структурой — Мегаобучалка
Системы с переменой структурой (СПС) относятся к классу систем с дискретным управлением по обратной связи. Основной особенностью СПС является наличие «скользящего режима» на поверхности переключения.
| Справка. Оптимальное по быстродействию управление представляет собой кусочно-постоянную функцию времени. Интерес представляют те области пространства состояний, в которых управление постоянно. Эти области разделяются линиями в двухмерном пространстве, поверхностями – в трехмерном пространстве и гиперповерхностями – в n-мерном пространстве. Такие разделяющие границы называют соответственно линиями переключения, поверхностями переключения и гиперповерхностями переключения. |
В скользящем режиме система не реагирует на изменение параметров и на возмущающие воздействия, а ее траектории проходят по поверхности переключения. Система управления в этом режиме нечувствительна к изменению параметров.
Пусть требуется найти управление переменной структурой для шестизвенного манипулятора. Вектор состояния:
. (18-2)
Вводя вектор ошибки позиционирования и вектор ошибки по скорости , сведем задачу слежения к задаче стабилизации. Уравнения ошибки системы:
и , (18-3)
где – вектор-функция размерностью n×1; b – матрица возмущения D.
Для системы стабилизации управление переменной структурой может быть записано в виде
(18-4)
где – поверхности переключения, удовлетворяющие условиям:
. (18-5)
После этого синтез управления сводится к выбору управления с обратной связью в соответствии с уравнением (18-4) так, чтобы скользящий режим происходил на пересечении с поверхностями переключения.
Решая алгебраические уравнения поверхностей переключения
(18-6)
можно отыскать единственно существующее управление
, (18-7)
где . После этого скользящий режим получается из уравнения (18-5) в виде:
. (18-8)
Это уравнение в явном виде описывает движение шести линейных систем первого порядка, каждое из которых представляет одну степень свободы манипулятора при нахождении системы в скользящем режиме. Как видно из уравнения (18-4), устройство управления переводит манипулятор в скользящий режим, при этом влияние сил взаимодействия между сочленениями полностью исключается. Для управления манипулятором в скользящем режиме используется устройство управления, реализующее управление в соответствии с уравнением (18-7). Динамика манипулятора в скользящем режиме зависит только от конструктивных параметров .
Адаптивное управление
Большинство методов управления манипулятором робота предназначено для управления конечным звеном манипулятора или сочленениями. В них уделено внимание компенсации нелинейностей от сил взаимодействия между различными сочленениями. Эти управляющие алгоритмы могут быть неадекватными, потому что требуют наличия точной модели динамики манипулятора и не учитывают изменения нагрузки в процессе выполнения манипулятором работы. Такие изменения в объекте управления часто оказываются достаточно значительными и снижают эффективность управления по обратной связи. В результате ухудшается динамика и демпфирование системы, что ограничивает точность и скорость позиционирования конечного звена. Значительное улучшение точности формирования желаемой траектории во времени для широкого диапазона движений манипулятора и для различных нагрузок достигается при использовании адаптивных методов управления.
megaobuchalka.ru
Как управлять манипулятором
Как управлять гидроманипулятором
Видео инструкция по управлению манипулятором Атлант С-90, Урал лесовоз Ямз-238. Пермский край Красновишерск.
Тестирование работы гидроманипулятора Д ЛАЙТ DL-97L украинской сборки. Подробнее о манипуляторах Д ЛАЙТ.
В 2015-ом интернациональная команда начала работу по созданию абсолютно нового поколения манипуляторов.
Как работает урал фискар (гидроманипулятор) / How does Ural Fiskars (hydraulic crane)
Константин-ПРО лесовоз с гидроманипулятором Велмаш ОМТЛ-120. Лесовоз с ГМ ОМТЛ-120-02 УСТ 5453 Урал М 44202-82, 6х6.
Лесовоз 63770В на базе Урал с ГМ ОМТЛ-70-02, производства ООО «Спецавтомаш».
Всем привет, в этом видео ролике я делюсь своим опытом и рассказываю почему не стоит работать на лесовозе.
Погрузка леса гидроманипулятором.
Лесной гидроманипулятор АТЛАНТ на сортиментовозе МАЗ 6303А8.
Благодарим вас за просмотр. Коли вам понравилось видео, ставьте лайк, подписывайтесь на канал, а также.
В видео наглядно показана работа автокрана по разгрузке строительных блоков. Заказать перевозку груза.
Брёвна берём не на лесоповале, а на делянках. Закидываем три бревна, смотрим на три зелёные точки на брёвнах.
Загрузка лесовоза древесиной с помощью лесного манипулятора Loglift 105 S для транспортировки на лесопилку.
О чем это видео: На видео показаны начало работы установки в обычном режиме и , затем, по мере нагрева рабоче.
электролобзик интерскол разборка как сделано внутри обзор
SolidWorks Flow Simulation tutorial. Анализ потока жидкости/пошаговая инструкция.
Электропроводка в стенах из Векчел. Как провести коммуникации в доме Векчел. Векчел_в_деталях
Реальная экономия газа! Котел + жигули, через месяц работы !!
Присоединяйся к обсуждению видео.
Предлагаем вашему вниманию ознакомится с самыми популярными запросами поиска видео-роликов за прошлый месец.
Для того, что бы ваша новость или какое либо событие появилось на Трибуне новостей, пройдите простую регистрацию.
Сайт может содержать контент, не предназначенный для лиц моложе 18 лет.
Источник:
Как управлять гидроманипулятором
Смотреть, Как управлять гидроманипулятором Видео!….
http://fassen.net/show/%D0%9A%D0%B0%D0%BA+%D1%83%D0%BF%D1%80%D0%B0%D0%B2%D0%BB%D1%8F%D1%82%D1%8C+%D0%B3%D0%B8%D0%B4%D1%80%D0%BE%D0%BC%D0%B0%D0%BD%D0%B8%D0%BF%D1%83%D0%BB%D1%8F%D1%82%D0%BE%D1%80%D0%BE%D0%BC
Как управлять манипулятором
Манипуляторы — это своеобразные устройства, которые можно установить на определенный тип грузового автомобиля. Они позволяют оптимизировать работу, выполняя ее вместо человека.

Существует огромное количество организаций, которые предоставляют услуги таких механизмов. Сегодня можно даже нанять газель с краном манипулятором, что очень часто применяется для погрузки тяжелых и габаритных товаров.
Данные виды механизмов имеют различное строение и могут использовать для решения различных задача. Их можно разделить на несколько видов:
- Торсовые краны представляют собой простые механизмы, где основным рабочим органом является стрела с определенным рабочим органом. Такие механизмы легко разворачиваются вокруг своей оси, что делает их практически универсальными. Они очень часто используются для перемещения грузов в котлованах, ямах или колодцах.
- Гидравлические манипуляторы очень широко используемые устройства. Их можно встретить как на лесовозах, так и на грузовых автомобилях, занимающихся перевозкой металла. Строение такого механизма немного отличается от предыдущего вида наличием ломаной стрелы. Это позволяет осуществлять погрузку или разгрузку товара с кузова автомобиля.
В первую очередь, перед тем как приступать к изучению управлением манипулятора, следует проверить на исправность всех основных механизмов автомобиля:
Следующим шагом является изучение инструкции по управлению манипулятором. Она должна присутствовать практически для каждого вида устройства. Затем следует приступать к наработке навыков изделием.
Существует огромное количество нюансов, которые следует учитывать при выполнении таких работ:
- Транспортировать грузы можно только при отсутствии на рабочей площадке людей.
- Вес товара должен соответствовать возможностям устройства. Не следует надеяться, что кран сможет выдержать и поднять несколько большой вес. На это также влияет вылет стрелы, которая чем дальше, тем меньше сможет поднять.
- При работе с манипуляторами следует придерживаться основных правил безопасности, чтобы не повредить механизм, а также не причинить вред окружающим.
Управление манипулятором это своеобразное искусство, которое требует хороших навыков. Усовершенствуйте их и вы будете выполнять такие работы очень качественно и уверенно.
Инструкция по управлению КМУ — в этом видео:
Источник:
Как управлять манипулятором
Манипуляторы — это своеобразные устройства, которые можно установить на определенный тип грузового автомобиля. Они позволяют оптимизировать работу, выполняя ее вместо человека. Существует огромное количество организаций, которые предоставляют услуги таких механизмов. Сегодня можно даже нанять
http://myogorod.ru/inventar-i-prisposobleniya/kak-upravlyat-manipulyatorom.html
Кран-манипулятор (КМУ) (конструкция и основные изменения вносимые в базовую комплектацию автомобиля)
Кран-манипулятор (КМУ) (конструкция и основные изменения вносимые в базовую комплектацию автомобиля)
Кран-манипулятор является наиболее удобным средством при погрузо-разгрузочных работах и подъеме кровельного рулонного материала. Он совместил в себе два вида транспортных средств — перевозку строительных материалов и подъем их на кровлю здания. (фото 5.8.1, 5.8.2) Экономия средств и времени — основное достоинство этого механизма. 
Фото 5.8.1 Кран-манипулятор
КамАЗ 53228 с краноманипуляторной установкой ИМ 240 (г/п — 7,0 т, вылет стрелы — 11,7 м) и бортовой платформой. Для обеспечения устойчивости на заднем свесе рамы автомобиля монтируются дополнительные опоры.
Кран-манипулятор — грузоподъемная машина, состоящая из краноманипуляторной установки (КМУ, рис. 5.8.3), смонтированной на транспортном средстве.
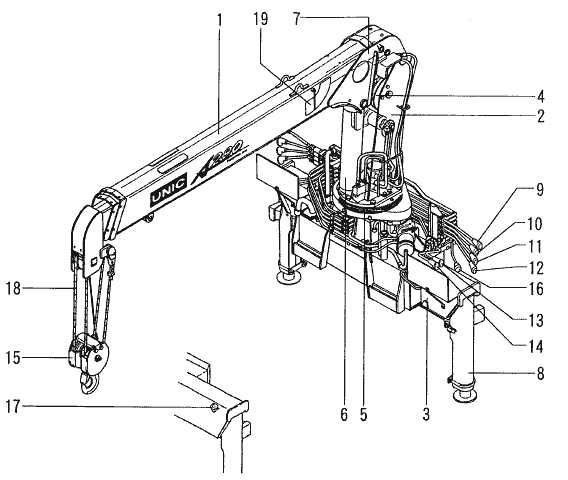
Рис. 5.8.3 Конструкция краноманипуляторной установки (КМУ), производства японской фирмы «FURUKAWA UNIC CORPORATION»
1- стрела; 2 — стойка; 3 — станина; 4 — подъемник лебедки; 5 — поворотное устройство; 6- главный цилиндр; 7-телескопический цилиндр; 8- аутригер;
10 -14, 16 — органы управления стрелой; 15 — крюковой блок; 17 – кнопка предупреждающего сигнала; 18 – трос; 19 — диаграмма угла наклона стрелы
Масса манипулятора, как правило, не превышает 20-25% полезной грузоподъемности базового автомобиля, что обеспечивает эффективное использование автомобиля по прямому назначению — для перевозки грузов.
Монтаж краноманипуляторной установки (КМУ)
Установка монтируется на любые грузовые транспортные средства КАМАЗ, МАЗ, Урал, Renault, Газель и.т.д. В зависимости от конфигурации транспортного средства оно оснащается выносными гидроопорами (аутригерами) двумя или четырьмя. Управляющие органы КМУ располагаются со стороны, где находится сиденье оператора. В неблагоприятных условиях, где сильнодействующие ядовитые вещества могут неблагоприятно отразиться на здоровье человека, производят дополнительное оснащение электрогидравлической системой дистанционного управления, позволяющего управлять краном-манипулятором на расстоянии.
Основные изменения, вносимые в базовую конфигурацию автомобиля при монтаже краноманипуляторной установки:
— на собственную раму грузового автомобиля установлена дополнительно силовая промежуточная рама;
— кузов автомобиля укорачивается или смещается;
— на коробку перемены передач установлена коробка отбора мощности (КОМ) крана-манипулятора с гидронасосом;
— доработана пневматическая и электрическая системы автомобиля (установлены электропневмоклапан, кнопка включения КОМ и крана-манипулятора).
Видеоролик: Подъем рулонного кровельного наплавляемого материала с помощью крана-манипулятора (КМУ) на кровлю здания высотой 12 метро в (размер видео 3,2 мегабайта).
Источник:
Кран-манипулятор (КМУ) (конструкция и основные изменения вносимые в базовую комплектацию автомобиля)
Кран-манипулятор является наиболее удобным средством при погрузо-разгрузочных работах и подъеме кровельного рулонного материала. Он совместил в себе два вида транспортных средств — перевозку строительных материалов и подъем их на кровлю здания.
http://armohim.ru/kmu.html
Порядок работы с краном

Состав обслуживающего персонала.
Оператор, управляющий Краном-манипулятором, должен быть ознакомлен с инструкцией по эксплуатации Кранами-манипуляторами и правилами безопасной работы. Кроме того, оператор должен пройти специальную подготовку по обслуживанию и эксплуатации гидравлических кранов-манипуляторов.
Управление Краном — манипулятором.
Приведение Крана-манипулятора в рабочее положение при работе с основной стрелой и крюковой подвеской.
Для приведения Крана-манипулятора в рабочее положение выполните следующее:
- включите привод насоса;
- поднимите рукоять в верхнее положение;
- выведите ось средней секции стрелы из зацепления с крюком;
- переведите стрелу в рабочее положение.
Кран-манипулятор подготовлен к работе.
Приведение Крана-манипулятора в транспортное положение при работе с основной стрелой и крюковой подвеской.
- установите рукоять в верхнее положение, опустите стрелу к рукояти и обеспечьте зацепление оси с крюком;
- установите стрелу в ложемент;
- выключите насос.
Источник:
Порядок работы с краном
Состав обслуживающего персонала. Оператор, управляющий Краном-манипулятором, должен быть ознакомлен с инструкцией по эксплуатации Кранами-манипуляторами и правилами безопасной работы. Кроме того, оператор должен пройти специальную подготовку по обслуживанию и эксплуатации гидравлических кранов-манипуляторов. Управление Краном — манипулятором. Прежде чем приступить к работе, изучите расположение и назначение органов управления и приборов. Приведение Крана-манипулятора в рабочее положение при рабо
http://www.domotvetov.ru/spetsavtotehnika/poryadok-rabotyi-s-kranom-man.html
leebra.ru
Система автоматического управления манипулятором робота-лунохода
2.7 Источники разработки:
Конспекты лекций по ТАУ и ЦСУ, метрологии, схемотехнике, микропроцессоры и программирование, надежности, передача данных, автоматизированное проектирование систем и средств управления, фонд библиотеки МФ ЮурГУ и информационных сайтов системы Internet.
Схема структурная электрическая предназначена для более глубокого изучения внутреннего строения системы, а так же позволяет найти место для дополнительных связей и улучшения качества изделия.
В соответствии с требованиями технического задания манипулятор должен перемещаться в космической среде.
На современном этапе развития вычислительной техники наиболее целесообразным будет строить систему управления на основе микроконтроллеров, т.к. цифровые элементы системы не имеют изменения характеристик от температуры, времени и т.п. К тому же современные микроконтроллеры обладают широкими возможностями для использования периферийного оборудования.
По техническому заданию требуется осуществлять связь по последовательному интерфейсу RS-485, следовательно, нам необходим формирователь протокола обмена по этому интерфейсу. Необходимо устройство, которое будет принимать команды по этому интерфейсу в соответствии с разработанным протоколом, и передавать текущее состояние манипулятора.
Т.к. манипулятор имеет 6 степеней свободы, то и контуров управления соответствующее число, плюс схват. Особенность контура управления схватом в том, что он не имеет обратной связи.
Для управления приводами и схватом необходимы усилители.
Для отслеживания текущего состояния манипулятора необходимы 6 датчиков углов, а также по трем осям требуется ввести обратную связь по скорости, для этого нужно еще 3 датчика скорости.
Для применения показаний датчиков в контурах управления необходима установка преобразователей и, возможно, усилителей, если сигнал слишком слабый.
Общую структурную схему системы управления можно представить в следующем виде:
Рис.1. Структурная схема системы управления в общем виде
Команды и данные, принятые от пульта оператора поступают на формирователь протокола обмена, где происходит проверка принятой информации на наличие ошибок, дешифрация команд и выделение из принятого пакета данных. Это же устройство должно формировать ответный пакет с данными, полученными от датчиков электромеханической системы. Наиболее рационально реализовать такое устройство программно.
Далее блок управления принимает решение о возможности выполнения принятых команд на основе информации о текущем состоянии электромеханической системы. Также он предоставляет данные о текущем состоянии манипулятора для формирователя протокола обмена которыми он заполняет ответный пакет данных для пульта оператора.
Контуры управления двигателями предназначены для создания заданного момента на двигателях при помощи усилителей, а управление усилителями происходит с помощью блока широтно-импульсной модуляции (ШИМ).
Обратная связь реализована через систему очувствления, включающую в себя датчики и преобразователи сигнала. Основные контура управления замкнуты на пульт оператора через формирователь протокола обмена, а дополнительные контуры управления по скорости на основании, плече и локте замкнуты на блок управления, который и рассчитывает необходимые управляющие воздействия.
Объектом управления является непосредственно манипулятор с шестью степенями свободы и схватом.
Контроль текущего состояния объекта осуществляется при помощи системы датчиков. Т.к. манипулятор имеет шесть степеней свободы, то нам необходимо шесть датчиков углов, а для реализации дополнительной обратной связи по скорости в 3 степенях нам необходимо дополнительно установить датчики скорости.
Таким образом, в системе управления будет 2 типа контуров управления приводами, один с обратной связью по скорости, второй без нее. Оба типа замкнуты через пульт оператора. Их структурные схемы приведены на Рис. 2 и Рис. 3.
Рис. 2. Структурная схема контура с обратной связью по скорости
Рис. 3. Структурная схема контура без обратной связи по скорости
Т.к. в контурах управления без обратной связи по скорости нет датчиков скорости, но имеется необходимость предотвращения перегрузок двигатели при, например, стопоре, то можно применить программное дифференцирование угла, для получения текущей скорости и сравнивать ее с заданным регулятором значением.
Контур управления схватом обратной связи не имеет, поэтому на схват не требуется установка датчиков.
Таким образом, структурная схема системы управления шестистепенным манипулятором примет вид, представленный на рисунке 4.
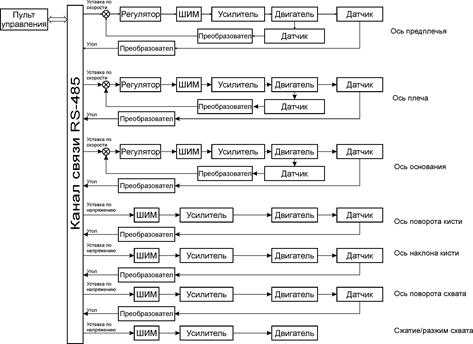
Рис. 4. Структурная схема системы управления схватом
4. Обоснование и выбор функциональной схемы
4.1 Обоснование и выбор двигателя
В соответствии с ТЗ выбираемый двигатель должен обладать следующими характеристиками:
1. Ток якоря электродвигателя на валу при максимальной нагрузке не должен превышать 10А;
2. Двигатель должен запитываться от одной аккумуляторной батареи 12В.
Двигатель – это электромеханический преобразователь, в котором осуществляется преобразование электрической энергии в механическую. В зависимости от рода потребляемого или отдаваемого в сеть тока двигатели подразделяются на двигатели переменного и постоянного тока. Двигатели переменного тока в свою очередь делятся на синхронные, асинхронные и коллекторные.
В синхронных двигателях поле возбуждения создается обмоткой, расположенной на роторе, которая питается постоянным током. Обмотка статора соединена с сетью переменного тока. В обычном исполнении вращающийся ротор с обмоткой возбуждения располагается внутри статора, а статор неподвижен. Управление синхронными двигателями осуществляется путем изменения частоты питающего напряжения, что недопустимо для нас. Синхронные двигатели также характеризуются большими угловыми скоростями и маленькими моментами. Поэтому часто такие двигатели используются в гироскопах.
В асинхронных двигателях специальная обмотка возбуждения отсутствует, рабочий поток создается реактивной составляющей тока обмотки статора. Этим объясняется простота конструкции и обслуживания асинхронных двигателей, так как отсутствуют скользящие контакты (щеточно-коллекторный узел) для подвода тока к вращающейся обмотке возбуждения и отпадает необходимость в дополнительном источнике постоянного тока для возбуждения двигателя. Недостатком является невозможность управления таким двигателем.
Среди коллекторных двигателей переменного тока получили распространение в основном однофазные двигатели малой мощности. Они находят применение в приводах, к которым подвод трехфазного или постоянного тока затруднен или нецелесообразен (в электрифицированном инструменте, бытовой технике и т. п.).
Использование двигателей переменного тока неприменимо для нашей системы, питающейся от аккумуляторов, т.к. для их использования придется устанавливать преобразователь постоянного напряжения в переменное.
Поэтому рассмотрим двигатели постоянного тока. Большинство двигателей постоянного тока — это коллекторные двигатели. Они выпускаются мощностью от долей ватта до нескольких тысяч киловатт. Обмотки возбуждения двигателей постоянного тока располагаются на главных полюсах, закрепленных на станине. Выводы секций обмотки ротора (якоря) впаяны в пластины коллектора.
Одна обмотка коллекторного двигателя постоянного тока представлена ниже:
Рисунок 5. Вид одной обмотки коллекторного двигателя постоянного тока
Ток, протекая по обмотке, находящейся в магнитном поле, наводит в ней ЭДС, которая старается провернуть рамку. Направление этой силы определяется по правилу правой руки. Чтобы во внешней цепи ток протекал в одном направлении, он должен быть выпрямлен. Для этого служит специальный электромеханический выпрямитель – коллектор, расположенный на валу машины. В простейшем случае используют две пластины с наложенными на них щетками. Последние так должны быть расположены в пространстве, чтобы коммутация происходила в моменты периода ЭДС через ноль. С увеличением количества рамок (секций) и соответственно пластин коллектора пульсации уменьшаются. При восьми коллекторных пластинах пульсация напряжения на щетках не превышает 1% от среднего, поэтому ток, протекающий во внешней цепи, можно считать практически постоянным.
Коллекторный двигатель постоянного тока обычно управляется при помощи Н-моста, позволяющего задавать направление вращения:
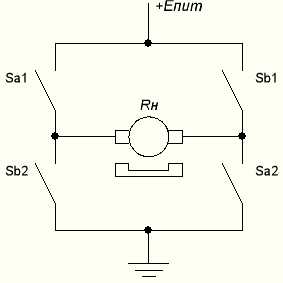
Рисунок 6. Н-мост
Для того, чтобы двигатель вращался вперед ключи Sa 1 и Sa 2, обозначенные на рисунке, должны быть замкнуты. Если необходимо вращение в обратную сторону, что замыкаются ключи Sb 1 и Sb 2, а Sa 1 и Sa 2 при этом должны быть разомкнуты.
Как видно, коллекторный двигатель постоянного тока прост в управлении. Но при этом обладает меньшим КПД, т.к. в единичный момент времени «полноценно работает» только 1 обмотка, а наличие щеточно-коллекторного узла приводит к искрению, стиранию контактов, что является причиной невысокой (по сравнению с другими двигателями) долговечностью.
mirznanii.com
Добавить комментарий