Управление манипулятором: Управление манипулятором
Управление манипулятором
Первым делом ставим автомобиль на ручной тормоз, коробку переключения передач ставим в нейтральное положение. Далее при выжатом сцеплении включаем коробку отбора мощности (ООО “ГИДРОКРАН” при монтаже КМУ устанавливает кнопку включения/выключения непосредственно в кабине водителя), плавно отпускаем сцепление – кран работает.
Для этого нам необходимо выдвинуть опоры (аутригеры) и установить их в рабочее положение. Выходим из кабины, и выдвигаем аутригеры (опоры) до характерного щелчка (картинка слева). После чего опускаем штоки опор, слегка приподнимая тем самым переднюю часть автомобиля, но колеса не должны отрываться от земли (их надо разгрузить примерно на половину). Смотрим картинку справа. Старайтесь не опускать опоры на мягкую поверхность (сырую почву, торфяную и болотистую местность), но если других вариантов нет, то под “башмаки” опор необходимо подложить основание значительно большей площади.
На этом этапе нам необходимо ослабить трос и направить стрелу в направлении груза. Ищем рычаг, отвечающий за работу лебедки (смотрим картинку слева). Потяните рычаг в соответствующую сторону, чтобы слегка его опустить (не перепутайте сторону, иначе порвете трос), теперь крюк нужно освободить от крепления (в случае, если крюк подворотный этот шаг пропускаем). Опускайте гак ниже, примерно на середину цилиндра подъема стрелы (регулируйте высоту “на глаз”). Гак в рабочем положении, теперь поворачиваем стрелу по направлению к грузу. Для этого ищем рычаг, отвечающий за поворот стрелы (смотрите картинку справа). Потяните рычаг в соответствующую сторону для поворота башни со стрелой в нужном направлении.
Для выполнения этого шага нам необходимо выбрать угол подъема стрелы, вылет стрелы, опустить гак и произвести строповку груза. Для оценки и выбора угла подъема стрелы (её же называют “удочкой”), нам нужно воспользоваться “шкалой грузоподъемности”. Это наклейка на боковой части стрелы под отвесом (смотрим картинку слева). Как ориентироваться по этой шкале? – ну с градусами все понятно, 10°, 20° и т.д., черные полосы (справа от которых цифры 1, 1+2, 1+2+3) – это вылет стрелы, причем первым вылетом считается “чулок” (т.е. основание стрелы, то положение вылетов, в котором стрела находится при транспортном положении), соответственно 1+2 – это “чулок” и первая выезжающая секция и 1+2+3 – это 3 вылета, т.е. 8 метров. Цифры под черными полосами 1,4, 3 и т.д. – это и есть грузоподъемность в соответствующем положении. Примерно оцените вес груза, с запасом. Далее нужно расположить стрелу так, чтобы гак оказался над грузом.
Для оценки и выбора угла подъема стрелы (её же называют “удочкой”), нам нужно воспользоваться “шкалой грузоподъемности”. Это наклейка на боковой части стрелы под отвесом (смотрим картинку слева). Как ориентироваться по этой шкале? – ну с градусами все понятно, 10°, 20° и т.д., черные полосы (справа от которых цифры 1, 1+2, 1+2+3) – это вылет стрелы, причем первым вылетом считается “чулок” (т.е. основание стрелы, то положение вылетов, в котором стрела находится при транспортном положении), соответственно 1+2 – это “чулок” и первая выезжающая секция и 1+2+3 – это 3 вылета, т.е. 8 метров. Цифры под черными полосами 1,4, 3 и т.д. – это и есть грузоподъемность в соответствующем положении. Примерно оцените вес груза, с запасом. Далее нужно расположить стрелу так, чтобы гак оказался над грузом.
Для подъема и опускания стрелы ищем рычаг, отвечающий за работу цилиндра подъема стрелы (ЦПС), смотрим картинку слева. По аналогии с предыдущими шагами, поднимаем стрелу. Далее ищем рычаг, отвечающий за работу цилиндра выдвижения стрелы (смотрим картинку справа). Обратите внимание, при выдвижении стрелы, гак должен быть опущен, так как лебедка в это время не работает, соответственно при выдвижении стрела притягивает гак и если троса будет недостаточно, он порвется. Как опускать крючок мы уже знаем. Выдвигаем стрелу на необходимый вылет и смотрим на шкалу грузоподъемности, при необходимости поднимаем стрелу выше и увеличиваем вылет. После того, как достигаем необходимого угла подъема и вылета удочки, опускаем гак и производим строповку груза. Далее слегка поднимаем стрелу гидравликой, лебедку не трогаем (при большом угле, вместо подъема – увеличиваем вылет), так, чтобы груз оторвался от земли не более чем на 10 см.
Обратите внимание, при выдвижении стрелы, гак должен быть опущен, так как лебедка в это время не работает, соответственно при выдвижении стрела притягивает гак и если троса будет недостаточно, он порвется. Как опускать крючок мы уже знаем. Выдвигаем стрелу на необходимый вылет и смотрим на шкалу грузоподъемности, при необходимости поднимаем стрелу выше и увеличиваем вылет. После того, как достигаем необходимого угла подъема и вылета удочки, опускаем гак и производим строповку груза. Далее слегка поднимаем стрелу гидравликой, лебедку не трогаем (при большом угле, вместо подъема – увеличиваем вылет), так, чтобы груз оторвался от земли не более чем на 10 см.
Если слышите, что насос работает, но груз не поднимается, значит груз слишком тяжелый, в случае, если согласно шкале грузоподъемности установка явно должна этот груз поднять – необходимо записаться на диагностику КМУ, возможно гидросистема засорилась или неисправен гидроклапан. В обоих случаях нужно переставить манипулятор поближе к грузу (по возможности) и пройти всю процедуру заново. Не поднимайте груз с земли лебедкой, она работает автономно, соответственно если ошибочно оценены вышеуказанные характеристики, есть риск погнуть стрелу.
Не поднимайте груз с земли лебедкой, она работает автономно, соответственно если ошибочно оценены вышеуказанные характеристики, есть риск погнуть стрелу.
Если все в порядке и груз оторвался от земли, оставьте его в таком положении (на высоте не более 10 см. от земли) на некоторое время, проверьте опоры и наличие крина. После проверки продолжаем работу, теперь можно работать лебедкой. Поднимаем груз на необходимую высоту и перемещаем в нужное место. ВАЖНО: не уменьшайте угол подъема, предварительно не уменьшив вылет стрелы, это приведет к перераспределению нагрузок в большую сторону, в следствие чего вероятна поломка манипулятора или опрокидывание грузовика. Соблюдайте технику безопасности, следите за тем, чтобы под грузом никого не было.
Поворачиваем стрелу (башню) в транспортное положение (смотрите картинку слева) вперед (над кабиной) или назад (над кузовом). Опускаем стрелу до упора. Поднимаем гак, в случае если КМУ оснащен поджимным крюком – подтягиваем гак, пока он не встанет в положение параллельно стреле, если гак не поджимной, то рекомендуется подложить деревянный брусок между крюком и стрелой, после чего поджать гак, это исключит его болтание во время движения автомобиля. Далее поднимаем штоки опор (аутригеров) до упора, задвигаем аутригеры (опоры) до щелчка. Убираем подложки под “подошву” опор, если таковые имеются. Садимся в кабину, выжимаем сцепление, выключаем коробку отбора мощности. Ваш кран-манипулятор переведен в транспортное положение, можете начинать движение.
Поднимаем гак, в случае если КМУ оснащен поджимным крюком – подтягиваем гак, пока он не встанет в положение параллельно стреле, если гак не поджимной, то рекомендуется подложить деревянный брусок между крюком и стрелой, после чего поджать гак, это исключит его болтание во время движения автомобиля. Далее поднимаем штоки опор (аутригеров) до упора, задвигаем аутригеры (опоры) до щелчка. Убираем подложки под “подошву” опор, если таковые имеются. Садимся в кабину, выжимаем сцепление, выключаем коробку отбора мощности. Ваш кран-манипулятор переведен в транспортное положение, можете начинать движение.
Для более подробной консультации с нашим специалистом Вы можете позвонить по номеру 8 (977) 758-72-03 или оставить заявку на обратный звонок.
✅ Органы управления краном-манипулятором: место расположения рычагов
Краноманипуляторная установка управляется при помощи рычажной системы.
Перед каждым рычагом стоит своя «задача»:
- Подъем и опускание стрелы КМУ.

- Подъем и опускание грузового крюка.
- Выдвижение и втягивание секций стрелы.
- Поворот вокруг своей оси колонны.
- Выдвижение и втягивание аутригеров.

Где же расположены рычаги управления краноманипуляторной установкой, позволяющие машинисту выполнять погрузо-разгрузочные работы? Вариантов их расположения всего два: верхнее и нижнее.
Верхнее управление манипулятором
Само слово «верхнее» наводит читателя на мысль о том, что рычажная система управления манипуляторной установкой находится на высоте.
Совершенно верно: верхнее управление краном-манипулятором – это рычаги, смонтированные в верхней части колонны. Почти все краны-манипуляторы с верхним рабочим местом оператора, укомплектованным креслом (без кабины) и рычагами управления на колонне.
Основное преимущество такого расположения системы управления – полный обзор погрузочной площадки, что позволяет оператору эффективно «руководить» стрелой.
Верхнее управление манипулятором, как правило, дублируется нижней системой: КМУ с пультом управления на колонне оснащается и рычагами в нижней части колонны, на раме.
Отчего же на городских улицах не так уж часто встречаются манипуляторы с кабиной либо креслом на колонне? Дело в том, что верхнее управление манипулятором применяют в основном на КМУ большой грузоподъемности и на тросовых манипуляторах.
Нижнее управление манипулятором
Рычаги управления, расположенные на раме у основания колонны – это нижнее управление КМУ. Оператор управляет рабочими процессами с земли, наблюдая за перемещением груза.
Нижний способ управления манипуляторной установкой самый распространенный, удобный и относительно безопасный.
Дистанционное управление манипулятором
Управление манипулятором посредством переносного пульта (на кабеле или радиоуправляемого) условно можно отнести к нижнему способу (уж никак не верхнему).
Пульт с джойстиком дает оператору возможность свободно перемещаться по рабочей площадке, контролируя процесс погрузки.
Дистанционный способ управления КМУ имеет неоспоримые преимущества:
- Полный обзор рабочей зоны.
- Безопасность оператора.

Пульты дистанционного управления весьма эффективны в промышленном производстве, складских помещениях, на строительных площадках.
Подберем любой манипулятор по желанию заказчика!
Автопарк компании содержит более шестидесяти единиц спецтехники различных модификаций. В зависимости от характера работ подберем манипулятор с любым управлением: верхним или нижним.
Проконсультируйтесь с менеджером – профессионал посоветует самый оптимальный вариант устройства. Договор аренды манипулятора будет оформлен в кратчайшие сроки на выгодных для клиента условиях.
Телефон: +7 (495) 227-30-10
Почта: [email protected]
ИНТЕРЕСНЫЕ СТАТЬИ
Систематический обзор существующих и новых подходов к управлению манипуляторами
Khan H, Iqbal J, Baizid K, et al. Контроль продольного и поперечного скольжения автономного колесного мобильного робота для отслеживания траектории.
Границы информационных технологий и электронной техники, 2015, 16 (2): 166–172Google ученый
Спонг М. В., Видьясагар М. Динамика и управление роботами. 3-е изд. Нью-Йорк: Джон Вили и сыновья, 2008 г.
Google ученый
Икбал Дж., Цагаракис Н.Г., Фиорилла А.Е. и др. Портативное реабилитационное устройство для кисти. В: 2010 Ежегодная международная конференция IEEE по инженерии в медицине и биологическом обществе (EMBC). Буэнос-Айрес: IEEE, 2010 г., 3694–3697
. Google ученый
Икбал Дж., Цагаракис Н., Колдуэлл Д. Оптимизация конструкции реабилитационного устройства экзоскелета руки. В: Материалы семинара по пониманию человеческой руки для продвижения роботизированных манипуляций, робототехники и систем (RSS). Сиэтл, 2009 г., 44–45
Google ученый
Икбал Дж., Цагаракис Н.Г., Колдуэлл Д.Г. Интерфейс роботизированного экзоскелета с несколькими степенями свободы для помощи при движении рук. В: 2011 Ежегодная международная конференция IEEE по инженерии в медицине и биологическом обществе (EMBC). Бостон: IEEE, 2011, 1575–1578
Google ученый
Икбал Дж., Цагаракис Н., Фиорилла А.Е. и др. Требования к конструкции робота-экзоскелета руки. В: 14-я Международная конференция IASTED по робототехнике и приложениям (РА). Массачусетс, 2009 г., стр. 44–51
Google ученый
Икбал Дж., Цагаракис Н., Колдуэлл Д. Дизайн носимого оптимизированного экзоскелета руки с прямым приводом. В: Материалы Четвертой Международной конференции по достижениям в области компьютерно-человеческого взаимодействия (ACHI). Гозьер: МАРИА, 2011. С. 142–146
. Google ученый
Азим М.М., Икбал Дж., Тойванен П. и др. Эмоции у роботов. В: Чоудхри Б.С., Шейх Ф.К., Акбар Хуссейн Д.М. и др., ред. Новые тенденции и приложения в информационно-коммуникационных технологиях. Берлин: Springer, 2012, 144–153 9.0005
Google ученый
Навид К.
, Икбал Дж., Ур Рахман Х. Интерфейс человека-робота, управляемого мозгом. В: 2012 Международная конференция по робототехнике и искусственному интеллекту (ICRAI). Равалпинди: IEEE, 2012, 55–60. Google ученый
Икбал Дж., Паша С.М., Байзид К. и др. Компьютерное зрение вдохновило на автономное обнаружение, отслеживание и блокировку движущихся целей в реальном времени. Журнал наук о жизни, 2013, 10(4): 3338–3345
МАТЕМАТИКА Google ученый
Икбал Дж., Паша М., Риаз-ун-Наби и др. Обнаружение и отслеживание целей в режиме реального времени: сравнительный подробный обзор стратегий. Журнал наук о жизни, 2013, 10(3): 804–813
Google ученый
Икбал Дж., Хейккила С., Халме А. Отслеживание троса и управление роботизированным вездеходом ROSA. В: 10-я Международная конференция по управлению, автоматизации, робототехнике и зрению (ICARCV).
Ханой: IEEE, 2008, 689.–693Google ученый
Икбал Дж., Саад М.Р., Тахир А.М. и др. Метод оценки состояния планетарного роботизированного вездехода. Revista Facultad de Ingeniería, 2014, 73: 58–68
Google ученый
Икбал Дж., Тахир А., Ислам Р.У. и др. Робототехника для атомных электростанций — вызовы и перспективы. В: 2012 2-я Международная конференция по прикладной робототехнике для энергетики (CARPI). Цюрих: IEEE, 2012, 151–156
Google ученый
Байзид К., Челлали Р., Юснадж А. и др. Моделирование роботизированной площадки и имитация оптимальной зоны размещения и ориентации робота. В: 21-я Международная конференция IASTED по моделированию и симуляции (MS). Канада, 2010, 9–16
Google ученый
Groover M P, Weiss M, Nagel R N, et al. Промышленная робототехника: технологии, программирование и приложения. McGraw-Hill Education, 2008 г.
Google ученый
Фу К. С., Гонсалес Р. К., Ли К. С. Г. Робототехника: контроль, сенсорное зрение и интеллект. McGraw-Hill Education, 2008 г.
Google ученый
Бамдад М. Аналитическое динамическое решение гибкого подвесного манипулятора. Границы машиностроения, 2013, 8(4): 350–359
Google ученый
Байзид К.
, Юснадж А., Меддахи А. и др. Планирование времени и оптимизация промышленных роботизированных задач на основе генетических алгоритмов. Робототехника и компьютерное интегрированное производство, 2015, 34: 140–150Google ученый
Асфаль К. Роботы и автоматизация производства. 2-е изд. Джон Вили и сыновья, Inc., 1992
Google ученый
Визиоли А. Тенденции исследований в области ПИД-регуляторов. Acta Polytechnica, 2012, 52(5): 144–150
Google ученый
Блевинс Т. Прогресс в промышленном управлении. В: Препринты конференции IFAC по достижениям в области ПИД-регулирования. Брешия, 2012 г.
Google ученый
Макмиллан Г.К. Промышленное применение ПИД-регулирования. В: Виланова Р.
, Визиоли А., ред. ПИД-регулирование в третьем тысячелетии. Лондон: Springer, 2012, 415–461. Google ученый
Брогард Т. Настоящее и будущее развитие систем управления роботами — промышленная перспектива. Ежегодные обзоры управления, 2007 г., 31 (1): 69–79
Google ученый
Брогард Т. Обзор управления роботами: промышленный взгляд. Моделирование, идентификация и контроль, 2009, 30(3): 167–180
Google ученый
Хан М. Ф., Икбал Дж., Ислам Р. У. Стратегии управления роботами-манипуляторами. В: 2012 Международная конференция по робототехнике и искусственному интеллекту (ICRAI). Равалпинди: IEEE, 2012, 26–33
. Google ученый
Крейг Дж. Дж. Введение в робототехнику. Аддисон-Уэсли Ридинг, Массачусетс, 2006 г.
Google ученый
Лян С., Чеккарелли М. Возможные области рабочего пространства для обычного двухоборотного манипулятора. Границы машиностроения, 2011, 6(4): 397–408
Google ученый
Ислам Р.У., Икбал Дж., Манзур С. и др. Автономный образ — управляемая роботизированная система, имитирующая промышленное применение. В: 2012 7-я Международная конференция по системной инженерии (SoSE). Генуя: IEEE, 2012, стр. 344–349.
Google ученый
Манзур С., Ислам Р.У., Халид А. и др. Учебная роботизированная платформа с несколькими степенями свободы с открытым исходным кодом для автономного манипулирования объектами. Робототехника и компьютерно-интегрированное производство, 2014, 30(3): 351–362
Google ученый
Аджвад С.А., Улла М.И., Ислам Р.У. и др. Моделирование роботов-манипуляторов – обзор и вывод кинематики на основе теории винтов. В: Международная конференция по инженерии и новым технологиям. Лахор, 2014, 66–69
Google ученый
Йиме-Родригес Э., Пенья-Кортес С.А., Рохас-Контрерас В.М. Динамическая модель гироскопической системы с четырьмя управляющими моментами. ДИНА, 2014, 81(185): 41–47
Google ученый
Мартон Л., Лантос Б. Управление роботизированными системами с неизвестным трением и полезной нагрузкой. IEEE Transactions on Control Systems Technology, 2011, 19(6): 1534–1539
Google ученый
Икбал Дж., ун Наби С.Р., Хан А.А. и др. Новая мобильная роботизированная платформа на гусеничном ходу для выполнения проектов по робототехнике и системам управления. Журнал наук о жизни, 2013, 10(3): 130–137
Google ученый
Аджвад С.А., Икбал У., Икбал Дж. Аппаратная реализация и управление шарнирной роботизированной рукой с несколькими степенями свободы. В: Новые тенденции и приложения в информационно-коммуникационных технологиях, коммуникациях в области компьютерных и информационных наук (CCIS). Берлин: Springer 2015 (в печати)
Google ученый
Fei Y, Wu Q.
Отслеживание управления манипуляторами роботов посредством линеаризации выходной обратной связи. Границы машиностроения в Китае, 2006 г., 1 (3): 329–335Google ученый
Нагарадж Б., Муруганант Н. Сравнительное исследование настройки ПИД-регулятора с использованием GA, EP, PSO и ACO. В: 2010 Международная конференция IEEE по управлению связью и вычислительным технологиям (ICCCCT). Раманатхапурам: IEEE, 2010, 305–313
Google ученый
Тан В., Лю Дж., Чен Т. и др. Сравнение некоторых известных формул настройки ПИД-регулятора. Компьютеры и химическая инженерия, 2006, 30 (9): 1416–1423
Google ученый
Foley M W, Julien R H, Copeland BR. Сравнение методов настройки ПИД-регулятора. Канадский журнал химической инженерии, 2005 г., 83 (4): 712–722
Google ученый
Икбал Дж., Хан Х., Цагаракис Н.Г. и др. Новая роботизированная система экзоскелета для реабилитации рук — от концептуализации до прототипирования. Биокибернетика и биомедицинская инженерия, 2014, 34(2): 79–89
Google ученый
Икбал У., Самад А., Нисса З. и др. Встроенная система управления для AUTAREP — новой AUTonomous сочлененной роботизированной образовательной платформы. Технический вестник, 2014, 21(6): 1255–1261
Google ученый
Аджвад С., Улла М., Байзид К. и др. Всеобъемлющее современное состояние управления промышленными шарнирными роботами.
Журнал Балканской трибологической ассоциации, 2014, 20(4): 499–521Google ученый
Улла М.И., Аджвад С.А., Ислам Р.У. и др. Моделирование и вычисление управления крутящим моментом манипулятора с 6 степенями свободы. Опубликовано: Международная конференция по робототехнике и новым смежным технологиям в инженерии (iCREATE), 2014 г. Исламабад: IEEE, 2014, 133–138
. Google ученый
Пилтан Ф., Сулейман Н., Джалали А. и др. Разработка адаптивного нечеткого вычисляемого регулятора крутящего момента без модели: применяется к нелинейной системе второго порядка. Международный журнал робототехники и автоматизации, 2011, 2(4): 232–244
Google ученый
Шаркави А.Б., Отман М.М., Халил А.М.А. Надежная схема управления нечетким отслеживанием для роботов-манипуляторов с экспериментальной проверкой.
Интеллектуальное управление и автоматизация, 2011, 2 (2): 100–111Google ученый
Chen Y, Ma G, Lin S, et al. Адаптивное нечеткое управление вычисляемым крутящим моментом для робота-манипулятора с неопределенной динамикой. Международный журнал передовых робототехнических систем, 2012, 9: 237–245
Google ученый
Лейнес М.Т., Ян Дж.С. LQR-управление планарным двуногим роботом с недостаточным приводом. В: 2011 6-я конференция IEEE по промышленной электронике и приложениям (ICIEA). Пекин: IEEE, 2011 г., 1684–1689
. Google ученый
Симмонс Г., Демирис Ю. Оптимальное управление манипулятором робота с использованием модели минимальной дисперсии. Журнал робототехнических систем, 2005 г., 22 (11): 677–69.0
МАТЕМАТИКА Google ученый
Вай Р. Дж., Мутусами Р. Нечеткая нейронная сеть унаследовала управление скользящим режимом для робота-манипулятора, включая динамику привода. IEEE Transactions on Neural Networks and Learning Systems, 2013, 24(2): 274–287
Google ученый
Набаи А.Р., Пилтан Ф., Эбрахими М.М. и др. Разработайте интеллектуальный надежный частично линейный член SMC для систем роботов-манипуляторов. Международный журнал интеллектуальных систем и приложений, 2014, 6: 58–71
Google ученый
Хаджиоглу Ю., Арслан Ю. З., Ягиз Н. Робот с двумя руками, управляемый в режиме нечеткого скольжения MIMO, при транспортировке грузов.
Журнал Института Франклина, 2011 г., 348 (8): 1886–19.02MathSciNet МАТЕМАТИКА Google ученый
Коррадини М.Л., Фосси В., Джантомасси А. и др. Дискретное управление скользящим режимом роботов-манипуляторов: разработка и экспериментальная проверка. Практика техники управления, 2012, 20(8): 816–822
Google ученый
Лагруш С., Мехмуд А., Багдури М. Э. Исследование методов нелинейного управления пневматическим приводом одностороннего действия VGT. Международный журнал автомобильного дизайна, 2012 г., 60 (3/4): 264–285
Google ученый
Камачо Э. Ф., Альба С. Б. Модель прогнозирующего управления. Спрингер, 2013
Google ученый
Ван Л. Проектирование и внедрение системы прогнозирующего управления моделями с использованием MATLAB®.
Лондон: Спрингер, 2009 г.. Google ученый
Хенми Т., Денг М., Иноуэ А. Адаптивное управление двухзвенным планарным манипулятором с использованием прогнозирующего управления нелинейной моделью. В: 2010 Международная конференция по мехатронике и автоматизации (ICMA). Сиань: IEEE, 2010, 1868–1873 гг.
Google ученый
Маздарани Х., Фаррохи М. Адаптивное нейропрогностическое управление роботами-манипуляторами в рабочем пространстве. В: 2012 17-я Международная конференция по методам и моделям в автоматизации и робототехнике (MMAR). Мендзыздрое: IEEE, 2012, 349–354
. Google ученый
Рохас-Морено А., Вальдивия-Маллки Р. Встроенная система управления положением манипулятора с использованием надежного нелинейного прогнозирующего управления. В: 2013 16-я Международная конференция по передовой робототехнике (ICAR).
Монтевидео: IEEE, 2013, стр. 1–6 9.0005Google ученый
Копот С., Лазар С., Бурлаку А. Прогностическое управление нелинейными визуальными следящими системами с использованием моментов изображения. Теория и приложения управления ИЭПП, 2012, 6(10): 1486–1496
Google ученый
Ван Л., Чай С., Роджерс Э. и др. Многопараметрические регуляторы с повторяющимся прогнозированием, использующие частотную декомпозицию. IEEE Transactions on Control Systems Technology, 2012, 20(6): 159.7–1604
Google ученый
Gu D W. Надежная система управления с помощью MATLAB®. Лондон: Спрингер, 2005 г.
. Google ученый
Монтано О.Е., Орлов Ю.В. Разрывное Ч. 1-управление механическими манипуляторами с фрикционными соединениями.
В: 2012 9-я Международная конференция по электротехнике, вычислительной технике и автоматическому управлению (CCE). Мехико: IEEE, 2012 г., стр. 1–6 9.0005Google ученый
Чен К. Надежное самоорганизующееся нейро-нечеткое управление с наблюдателем неопределенности для нелинейных систем MIMO. IEEE Transactions on Fuzzy Systems, 2011, 19(4): 694–706
Google ученый
Сикейра А. А. Г., Терра М. Х. Управление импедансом h2 на основе смешанной модели/нейронной сети ограниченных манипуляторов. В: Международная конференция IEEE по управлению и автоматизации (ICCA). Крайстчерч: IEEE, 2009 г., 1901–1906
Google ученый
Ян З., Фукусима Ю., Цинь П. Децентрализованное адаптивное надежное управление роботами-манипуляторами с использованием наблюдателей возмущений.
IEEE Transactions on Control Systems Technology, 2012, 20(5): 1357–1365Google ученый
Kim Y, Seok J, Noh I и др. Адаптивный наблюдатель возмущений для двухзвенного робота-манипулятора. В: Международная конференция по управлению, автоматизации и системам (ICCAS). Сеул: IEEE, 2008 г., стр. 141–145 9.0005
Google ученый
He Z, Xie W. Усовершенствованная структура управления на основе наблюдения за возмущениями. В: Китайская конференция по контролю и принятию решений (CCDC). Гуйлинь: IEEE, 2009, 1015–1020
Google ученый
Парса М., Фаррохи М. Надежная нелинейная модель, прогнозирующая траекторию, свободное управление двуногими роботами на основе нелинейного наблюдателя возмущений. В: 2010 г. 18-я Иранская конференция по электротехнике (ICEE). Исфахан: IEEE, 2010, 617–622
Google ученый
Мохаммади А., Маркес Х. Дж., Таваколи М. Траектория возмущения на основе наблюдателя после управления нелинейными роботизированными манипуляторами. В: Труды 23-го Канадского конгресса прикладной механики. 2011
Google ученый
Мохаммади А., Таваколи М., Маркес Х. и др. Дизайн наблюдателя нелинейных возмущений для роботов-манипуляторов. Практика техники управления, 2013, 21(3): 253–267
Google ученый
Лагруш С., Ахмед Ф.С., Мехмуд А. Управление обратным ходом на основе наблюдения за давлением и трением для пневматического привода VGT.
IEEE Transactions on Control Systems Technology, 2014, 22(2): 456–467Google ученый
Аримото С. Управление на основе пассивности [динамика роботов]. В: Международная конференция IEEE по робототехнике и автоматизации (ICRA) (Том 1). Сан-Франциско: IEEE, 2000, 227–232
. Google ученый
Шибата Т., Мураками Т. Управление нулевыми космическими силами, основанное на пассивности избыточного манипулятора. В: ICM2007 4-я Международная конференция IEEE по мехатронике. Кумамото: IEEE, 2007, 1–6 9.0005
Google ученый
Отт С., Альбу-Шаффер А., Куги А. и др. Об пассивном управлении импедансом гибких суставных роботов. IEEE Transactions on Robotics, 2008, 24(2): 416–429
Google ученый
Фоудил А., Хадиа С. Пассивное управление роботом-манипулятором с тремя степенями свободы. В: Международная конференция по коммуникациям, компьютерам и энергетике (ICCCP). Маскат, 2007, 56–59
Google ученый
Bouakrif F, Boukhetala D, Boudjema F. Контроллер-наблюдатель на основе пассивности для роботов-манипуляторов. В кн.: 3-я Международная конференция по информационным и коммуникационным технологиям: от теории к приложениям. Дамаск: IEEE, 2008 г., стр. 1–5 9.0005
Google ученый
Ландау И. Д.
, Лозано Р., М’ Саад М. и др. Адаптивное управление: алгоритмы, анализ и приложения. Лондон: Спрингер, 2011 г.. Google ученый
Сунь Т., Пей Х., Пан Ю и др. Адаптивное управление скользящим режимом на основе нейронной сети для роботов-манипуляторов. Нейрокомпьютинг, 2011, 74(14–15): 2377–2384
Google ученый
Aseltine J, Mancini A, Sarture C. Обзор адаптивных систем управления. Операции ИРЭ на автоматическом контроле. 1958, 6(1): 102–108
Google ученый
Острём К. Дж., Виттенмарк Б. О самонастраивающихся регуляторах. Automatica, 1973, 9(2): 185–199
МАТЕМАТИКА Google ученый
Слотин Дж. Дж. Э., Ли В. Об адаптивном управлении роботами-манипуляторами. Международный журнал исследований робототехники, 1987, 6(3): 49–59
Google ученый
Хуанг С., Тан К.К., Ли Т.Х. Адаптивная компенсация трения с использованием аппроксимаций нейронной сети. IEEE Transactions on Systems, Man, and Cybernetics, Part C: Applications and Reviews, 2000, 30 (4): 551–557
Google ученый
Purwar S, Kar I N, Jha A N. Адаптивное управление манипуляторами роботов с использованием систем нечеткой логики при ограничениях привода. В: Международная конференция IEEE по нечетким системам, 2004 г. (Том 3). IEEE, 2004, 1449–1454
Google ученый
Schindele D, Aschemann H. Адаптивная компенсация трения на основе модели LuGre для пневматического бесштокового цилиндра.
В: Промышленная электроника, 2009 г.. IECON’09 35-я ежегодная конференция IEEE. Порту: IEEE, 2009, 1432–1437. Google ученый
Гарпингер О., Хэгглунд Т., Седерквист Л. Программное обеспечение для проектирования ПИД-регуляторов: преимущества и недостатки. В: 2-я конференция IFAC по достижениям в области ПИД-регулирования. Брешиа, 2012, 2(1): 140–145
Google ученый
Хара С.А., Канделас Ф.А., Гил П. и др. Ejs + EjsRL: интерактивный инструмент для моделирования промышленных роботов, компьютерного зрения и удаленного управления. Робототехника и автономные системы, 2011, 59(6): 389–401
Google ученый
Корке П.И. Набор инструментов робототехники для MATLAB. Журнал IEEE Robotics & Automation, 1996, 3 (1): 24–32
Google ученый
Falconi R, Melchiorri C. Roboticad: Учебное пособие по робототехнике. В: Материалы 17-го Всемирного конгресса IFAC. Корея, 2008, 9111–9116
Google ученый
Žlajpah L. Интегрированная среда для моделирования, симуляции и проектирования управления для роботов-манипуляторов. Журнал интеллектуальных и роботизированных систем, 2001 г., 32 (2): 219–234
МАТЕМАТИКА Google ученый
Maza JI, Ollero A. HEMERO: набор инструментов MATLAB-Simulink для робототехники. В: 1-й семинар по робототехнике образования и обучения. Германия, 2001, 43–50
Google ученый
Нетери Дж. Ф., Спонг М. В. Robotica: Пакет Mathematica для анализа роботов. Журнал IEEE Robotics & Automation, 1994, 1 (1): 13–20
Google ученый
Дин-Леон Э., Наир С., Нолл А. Удобный для пользователя набор инструментов Matlab для символического динамического моделирования роботов, используемый для проектирования систем управления. Опубликовано: Международная конференция IEEE по робототехнике и биомиметике (ROBIO), 2012 г. Гуанчжоу: IEEE, 2012, 2181–2188
. Google ученый
Ромер Э., Сингх С. П., Фриз М. V-REP: универсальная и масштабируемая среда моделирования роботов. Опубликовано: Международная конференция IEEE/RSJ по интеллектуальным роботам и системам (IROS), 2013 г.
Токио: IEEE, 2013, 1321–1326Google ученый
Брейс А., Клаассенс Б., Бабушка Р. Среда проектирования Matlab для роботизированных манипуляторов. В: 16-й Всемирный конгресс IFAC. Прага, 2005 г., 1331–1336
Google ученый
Шах С.В., Нандихал П.В., Саха С.К. Симулятор рекурсивной динамики (ReDySim): Решатель динамики нескольких тел. Письма по теоретической и прикладной механике, 2012, 2: 063011
Google ученый
Феррейра Н. Ф., Мачадо Дж. Т. RobLib: Образовательная программа по робототехнике. В: Симпозиум по управлению роботами (SYROCO). Вена, 2000 г., 563–568
Google ученый
Руководство Arm6x. Concurrent Dynamics International, 2014
Google ученый

 “>
“>Икбал Дж., Цагаракис Н.Г., Колдуэлл Д.Г. Оптимизированная система экзоскелета, совместимая с человеческой рукой. В: 2010 Международная конференция IEEE по робототехнике и биомиметике (ROBIO). Тяньцзинь: IEEE, 2010, 685–690
. Google ученый
 “>
“>Хан А.А., ун Наби С.Р., Икбал Дж. Оценка поверхности пешеходной прогулки для использования на открытом воздухе робота на базе инвалидной коляски с электроприводом. Журнал наук о жизни, 2013, 10 (3): 1697–1704
Google ученый
 , Икбал Дж., Ур Рахман Х. Интерфейс человека-робота, управляемого мозгом. В: 2012 Международная конференция по робототехнике и искусственному интеллекту (ICRAI). Равалпинди: IEEE, 2012, 55–60
, Икбал Дж., Ур Рахман Х. Интерфейс человека-робота, управляемого мозгом. В: 2012 Международная конференция по робототехнике и искусственному интеллекту (ICRAI). Равалпинди: IEEE, 2012, 55–60 Ханой: IEEE, 2008, 689.–693
Ханой: IEEE, 2008, 689.–693 “>
“>Меддахи А., Байзид К., Юснадж А. и др. Графическое моделирование роботизированных площадок на основе API. В: Международная конференция IASTED по робототехнике и приложениям. Кембридж, 2009 г., 485–492
Google ученый
 , Юснадж А., Меддахи А. и др. Планирование времени и оптимизация промышленных роботизированных задач на основе генетических алгоритмов. Робототехника и компьютерное интегрированное производство, 2015, 34: 140–150
, Юснадж А., Меддахи А. и др. Планирование времени и оптимизация промышленных роботизированных задач на основе генетических алгоритмов. Робототехника и компьютерное интегрированное производство, 2015, 34: 140–150 , Визиоли А., ред. ПИД-регулирование в третьем тысячелетии. Лондон: Springer, 2012, 415–461
, Визиоли А., ред. ПИД-регулирование в третьем тысячелетии. Лондон: Springer, 2012, 415–461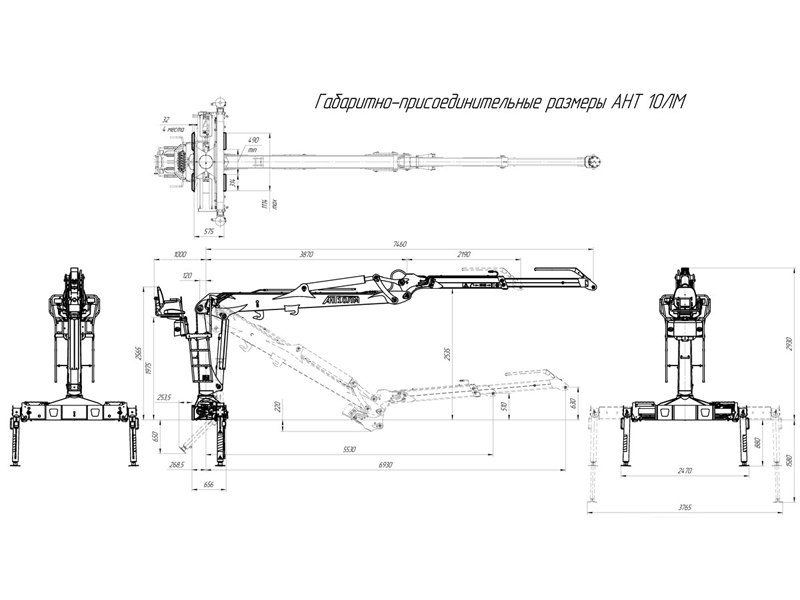
 “>
“>Альварес Чаварриа Х.С., Хименес Буилес Х.А., Рамирес Патиньо Х.Ф. Цикл проектирования робота для обучения и развития творческих способностей в инженерии. ДИНА, 2011, 78(170): 51–58
Google ученый
 “>
“>Икбал Дж., Ислам Р.У., Хан Х. Моделирование и анализ робота-манипулятора с 6 степенями свободы. Канадский журнал по электротехнике и электронике, 2012 г., 3(6): 300–306
Google ученый
 Отслеживание управления манипуляторами роботов посредством линеаризации выходной обратной связи. Границы машиностроения в Китае, 2006 г., 1 (3): 329–335
Отслеживание управления манипуляторами роботов посредством линеаризации выходной обратной связи. Границы машиностроения в Китае, 2006 г., 1 (3): 329–335 “>
“>Икбал Дж., Цагаракис Н.Г., Колдуэлл Д.Г. Роботизированная система экзоскелета с недостаточным приводом, совместимая с рукой человека. Письма об электронике, 2014, 50(7): 494–496
Google ученый
 Журнал Балканской трибологической ассоциации, 2014, 20(4): 499–521
Журнал Балканской трибологической ассоциации, 2014, 20(4): 499–521 Интеллектуальное управление и автоматизация, 2011, 2 (2): 100–111
Интеллектуальное управление и автоматизация, 2011, 2 (2): 100–111 “>
“>Ислам Р.У., Икбал Дж., Хан К. Проектирование и сравнение двух стратегий управления для шарнирного робота-манипулятора с несколькими степенями свободы. Техника управления и прикладная информатика, 2014, 16(2): 28–39
Google ученый
 Журнал Института Франклина, 2011 г., 348 (8): 1886–19.02
Журнал Института Франклина, 2011 г., 348 (8): 1886–19.02 Монтевидео: IEEE, 2013, стр. 1–6 9.0005
Монтевидео: IEEE, 2013, стр. 1–6 9.0005 В: 2012 9-я Международная конференция по электротехнике, вычислительной технике и автоматическому управлению (CCE). Мехико: IEEE, 2012 г., стр. 1–6 9.0005
В: 2012 9-я Международная конференция по электротехнике, вычислительной технике и автоматическому управлению (CCE). Мехико: IEEE, 2012 г., стр. 1–6 9.0005 IEEE Transactions on Control Systems Technology, 2012, 20(5): 1357–1365
IEEE Transactions on Control Systems Technology, 2012, 20(5): 1357–1365 “>
“>Мохаммади А., Таваколи М., Маркес Х. Управление нелинейными тактильными телеоперационными системами на основе наблюдения за нарушениями. IET Control Theory & Applications, 2011, 5(18): 2063–2074
MathSciNet Google ученый
 IEEE Transactions on Control Systems Technology, 2014, 22(2): 456–467
IEEE Transactions on Control Systems Technology, 2014, 22(2): 456–467 “>
“>Каваи Х., Мурао Т., Сато Р. и др. Пассивное управление двухстепенными роботами-манипуляторами с антагонистическими двусуставными мышцами. В: 2011 Международная конференция IEEE по приложениям управления (CCA). Денвер: IEEE, 2011, 1451–1456
Google ученый
 , Лозано Р., М’ Саад М. и др. Адаптивное управление: алгоритмы, анализ и приложения. Лондон: Спрингер, 2011 г.
, Лозано Р., М’ Саад М. и др. Адаптивное управление: алгоритмы, анализ и приложения. Лондон: Спрингер, 2011 г. “>
“>Лозано Р., Брольято Б. Адаптивное управление роботами-манипуляторами с гибкими соединениями. IEEE Transactions on Automatic Control, 1992, 37(2): 174–181
MathSciNet МАТЕМАТИКА Google ученый
 В: Промышленная электроника, 2009 г.. IECON’09 35-я ежегодная конференция IEEE. Порту: IEEE, 2009, 1432–1437
В: Промышленная электроника, 2009 г.. IECON’09 35-я ежегодная конференция IEEE. Порту: IEEE, 2009, 1432–1437 “>
“>Корке П. Робототехника, зрение и управление: основные алгоритмы в MATLAB. Берлин: Springer, 2011
Google ученый
 “>
“>Альсина П. Дж. ROBOTLAB: Программное обеспечение для графического моделирования роботов. Simpósio Brasileiro de Automação Inteligente, 1997, 465–470
Google ученый
 Токио: IEEE, 2013, 1321–1326
Токио: IEEE, 2013, 1321–1326 “>
“>Fueanggan S, Chokchaitam S. Моделирование динамики и кинематики для роботов. В: Международная ассоциация компьютерных наук и информационных технологий – Весенняя конференция. Сингапур: IEEE, 2009 г., 136–140
Google ученый
Ссылки для скачивания
Решения обратной кинематики с устойчивостью к сингулярности для управления роботом-манипулятором | Дж. Дин. Сис., Изм., Контроль.
Пропустить пункт назначения навигации
Научно-исследовательские работы
Ёсихико Накамура,
Хидео Ханафуса
Информация об авторе и статье
Дж. Дин. Сис., Изм., Контроль . Сентябрь 1986 г., 108(3): 163-171 (9 страниц)
https://doi.org/10.1115/1.3143764
Опубликовано в Интернете: 1 сентября 1986 г.
История статьи
Получено:
6 апреля 1986 г.
Онлайн:
21 июля 2009 г.
- Просмотры
- Содержание статьи
- Рисунки и таблицы
- Видео
- Аудио
- Дополнительные данные
- Экспертная оценка
- Делиться
- Твиттер
- MailTo
Иконка Цитировать Цитировать
Разрешения
- Поиск по сайту
Цитирование
Накамура Ю. и Ханафуса Х. (1 сентября 1986). «Решения обратной кинематики с устойчивостью к сингулярности для управления роботом-манипулятором». КАК Я. Дж. Дин. Сис., Изм., Контроль . сентябрь 1986 г .; 108(3): 163–171. https://doi.org/10.1115/1.3143764
и Ханафуса Х. (1 сентября 1986). «Решения обратной кинематики с устойчивостью к сингулярности для управления роботом-манипулятором». КАК Я. Дж. Дин. Сис., Изм., Контроль . сентябрь 1986 г .; 108(3): 163–171. https://doi.org/10.1115/1.3143764
Скачать файл цитаты:
- Рис (Зотеро)
- Менеджер ссылок
- EasyBib
- Подставки для книг
- Менделей
- Бумаги
- Конечная примечание
- РефВоркс
- Бибтекс
- Процит
- Медларс
Расширенный поиск
Проблема сингулярности — неотъемлемая проблема управления роботами-манипуляторами с шарнирно-сочлененной конфигурацией. В этой статье мы предлагаем определить совместное движение для требуемого движения эндоэффектора путем оценки возможности совместного движения. Определенное совместное движение называется инверсным кинематическим решением с устойчивостью к сингулярности, потому что оно обозначает допустимое решение даже в особых точках или поблизости от них. Устойчивая к сингулярности обратная (SR-обратная) вводится как альтернатива псевдообратной матрице Якоби. SR-обратная матрица Якоби дает нам аппроксимирующее движение, близкое к желаемой декартовой траектории эндоэффектора, даже когда обратное кинематическое решение с помощью обратной или псевдообратной матрицы Якоби невозможно при или вблизи сингулярной точки. Свойства SR-инверсии выясняются при сравнении ее с инверсией и псевдоинверсией. Вычислительная сложность SR-инверсии рассматривается для обсуждения ее реализуемости. Также показано несколько результатов моделирования, иллюстрирующих проблему сингулярности и эффективность обратного кинематического решения с устойчивостью к сингулярности.
Определенное совместное движение называется инверсным кинематическим решением с устойчивостью к сингулярности, потому что оно обозначает допустимое решение даже в особых точках или поблизости от них. Устойчивая к сингулярности обратная (SR-обратная) вводится как альтернатива псевдообратной матрице Якоби. SR-обратная матрица Якоби дает нам аппроксимирующее движение, близкое к желаемой декартовой траектории эндоэффектора, даже когда обратное кинематическое решение с помощью обратной или псевдообратной матрицы Якоби невозможно при или вблизи сингулярной точки. Свойства SR-инверсии выясняются при сравнении ее с инверсией и псевдоинверсией. Вычислительная сложность SR-инверсии рассматривается для обсуждения ее реализуемости. Также показано несколько результатов моделирования, иллюстрирующих проблему сингулярности и эффективность обратного кинематического решения с устойчивостью к сингулярности.
Раздел выпуска:
Научные статьи
Темы:
Кинематика, Манипуляторы, Прочность, матрицы Якоби, Результаты симуляции, Траектории (физика)
Этот контент доступен только в формате PDF.
Добавить комментарий