Скорость перемещения гидроцилиндра: Движущее усилие и скорость поршня гидроцилиндра
Движущее усилие и скорость поршня гидроцилиндра
28. Движущее усилие и скорость поршня гидроцилиндра
28.1. Предварительный расчет
Расчетное движущее усилие F на штоке, развиваемое давлением р жидкости на поршень (трением поршня и штока, а также противодавлением в нерабочей полости и силой инерции пренебрегаем), упрощенно определяется по формуле:
, Н
где S– рабочая (эффективная) площадь поршня.
Рабочая площадь Sпоршня для одноштокового гидроцилиндра с двумя рабочими полостями (рис. 7.1, а) определяется по формулам:
― при подаче жидкости в поршневую полость:
,
― при подаче жидкости в штоковую полость:
, где D и d – диаметры поршня и штока.
При равной подаче жидкости в поршневую и штоковую полости, скорости перемещения подвижной части цилиндра будут определяться (без учета утечек жидкости) из уравнения расхода Q жидкости, поступающей в цилиндр по формулам
; , υп < υшт м/с.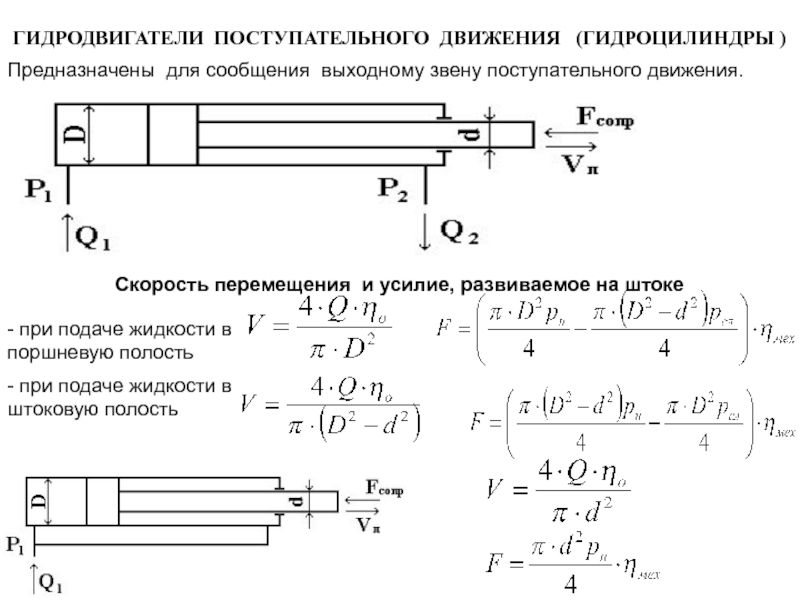
28.2. Расчет движущего усилия с учетом сил инерции и трения
Рис. 7.2. – Расчетная схема гидроцилиндра
Согласно расчетной схеме рис. 7.2, условие равновесия поршня гидроцилиндра в период разгона с полезной нагрузкой до скорости установившегося движения определяется зависимостью:
Fст = F + Ff+ Fтp + Fин+ Fс
где Fст – расчетная (статическая) нагрузка, Н;
F – полезная нагрузка, приложенная к штоку цилиндра H;
Ff – сила трения подвижных частей гидроцилиндра, учитывается при горизонтальном расположении последнего, Н;
Fтp – сила трения, возникавшая в уплотнениях штока и поршня, H;
Fин – сила инерции движущихся масс, кинематически жестко связанных со штоком поршня, H;
Fс – сила противодавления, Н.
Расчетная сила Fст – является движущей силой, составной частью затраченной энергии в гидроцилиндре.
При движениипоршня вправо: , где D – диаметр цилиндра, м;
pн– давление рабочей жидкости в напорной полости цилиндра, Па.
Как показали исследования оптимальной величиной рабочего давления жидкости в гидроцилиндрах является давление 25…30 МПа, при котором реализуется наибольший экономический эффект: наименьшая металлоемкость и умеренные затраты на изготовление гидроцилиндров.
При движении поршня влево:
где d
Сила трения Ff состоит из силы трения покоя Ffп и силы трения движения Ffд, которые определяются по формулам:
и , где μ0 – коэффициент трения покоя μ0 = 0,15.
G – вес подвижных масс, кинематически жестко связанных со штоком поршня, Н.
μ – коэффициент трения движения; при низких скоростях (υ<0,05 м/с) и установившемся движении μ = 0,1…0,12; при больших скоростях (υ>0,05 м/с) и хорошей смазке μ =0,05…0,08.
Если в качестве уплотнений штока и поршня применены резиновые манжеты или же манжеты уменьшенного сечения, то сила трения, создаваемая этими уплотнениями, составляет величины:
и , где D и d – уплотнительные диаметры, м;
b – ширина уплотнения, м;
k – удельное трение; при работе на минеральном масле k = 0,22 МПа.
Если в поршне для уплотнения применены металлические кольца, то сила трения определяется по формуле:
, где b – ширина кольца, м;
pк = 0,09…0,1 МПа – давление кольца на внутренней поверхности цилиндра;
f1 – коэффициент трения: при установившемся движении f1 =0,07, при разгоне f1 = 0,15).
Сила инерции Fин определяется по формуле:
где m – масса подвижных, частей, кг;
a – ускорение м/с2;
υcp – средняя скорость в момент разгона, м/с;
lp – путь, пройденный поршнем в период разгона, м;
Задаваясь общим временем перемещения поршня гидроцилиндра t и пройденным им расстоянием (ходом) l определяет среднюю скорость:
, где
Общее время для перемещения поршня tсоставит величину
t = tp + ty +tт, где tp, ty,tт – время, затрачиваемое на разгон, установившееся движение и торможение, определяются по формулам
, ,
где ly,lт – путь, пройденный поршнем в период установившегося движения и торможения.
Сила противодавления рабочей жидкости Fс определяется давлением рабочей жидкости в полости слива pc.
При движениипоршня вправо : .
При движении поршня влево: .
28.3. КПД гидроцилиндров
Пусковой КПД гидроцилиндра представляет собой отношение полезной нагрузки к расчетной Fст:
.
Величиной пускового КПД ηп оцениваются
затраты мощности при пуске и разгоне подвижных масс гидроцилиндра.
Эффективность работы гидроцилиндров может оцениваться по величине его полного КПД:
, где Nпол и Nзатр – мощность, отведенная от силового цилиндра и подведенная к нему;
– реальная скорость поршня;
Qт – подача рабочей жидкости на входе в гидроцилиндр;
pн – давление рабочей жидкости в напорной полости силового цилиндра.
Общий КПД гидроцилиндра может бить также вычислен по зависимости:
где = 0,85…0,97– механический КПД гидроцилиндра, которым учитываются потери мощности от трения движущихся масс; величина его зависит от конструкции гидроцилиндра и уплотнений и, прежде всего,, от качества обработки сопрягаемых деталей
– объемный КПД гидроцилиндра, которой определяется объемными потерями мощности (отношение действительной к теоретической расчетной скорости поршня).
Гидроцилиндры Регулирование скорости – Справочник химика 21
Ротор осадительных центрифуг — сплошной сварной. У этих центрифуг в отличие от фильтрующих имеется механизм отвода осветленной жидкости, состоящий из отводящей трубы с силовым гидроцилиндром и дросселем для регулирования скорости поворота отводящей трубы. [c.407]
У этих центрифуг в отличие от фильтрующих имеется механизм отвода осветленной жидкости, состоящий из отводящей трубы с силовым гидроцилиндром и дросселем для регулирования скорости поворота отводящей трубы. [c.407]Чаще всего для машинного регулирования скорости в гидроприводах используют регулируемые насосы и нерегулируемые гидродвигатели (гидромоторы или гидроцилиндры). Известно [c.71]
Регулятор расхода, подключенный к одной из полостей гидроцилиндра, обеспечивает стабилизацию скорости движения его выходного звена. На рис. 15.4 показана схема такой системы регулирования скорости исполнительного гидродвигателя. [c.449]
Анализ этих формул показывает, что изменение (регулирование) скорости (У или Пг) выходного звена объемного гидропривода возможно, если управлять величиной расхода 0, поступающего в гидродвигатель, либо при использовании регулируемого гидромотора за счет изменения его рабочего объема Последний способ в гидроприводах поступательного движения не используется, так как не существует гидроцилиндров с регулируемой эффективной площадью поршня 5 . [c.196]
[c.196]
На рис. 7.5 приведена принципиальная схема гидропривода с дроссельным регулированием скорости при последовательном включении дросселя 5 на входе в гидродвигатель (гидроцилиндр 4). [c.200]
Следует отметить, что гидропривод с дросселем 5 на входе в гидродвигатель 4 (рис. 7.5), так же как и гидропривод с параллельным включением дросселя, допускает регулирование скорости выходного звена только при нагрузке на нем, направленной против движения. При помогающей нагрузке (совпадающей по направлению со скоростью движения поршня) может даже произойти отрыв поршня от рабочей жидкости в гидроцилиндре. Вероятность этого особенно высока, если произошло перекрытие дросселя, а поршень продолжает движение под действием сил инерции. [c.201]
На рис. 7.12 приведена схема гидропривода с объемно-дроссельным регулированием скорости движения поршня гидроцилиндра 4 при последовательном включении гидродросселя 5 на выходе из гидроцилиндра. [c.207]
[c.207]
При этом насосная установка решает ту же задачу, что и насосная установка, состоящая из нерегулируемого насоса и переливного клапана, в гидроприводе, схема которого приведена на рис. 1.1,а. Следовательно, закон регулирования скорости движения поршня гидроцилиндра 4 в рассматриваемом гидроприводе можно описать уравнением (7.8). [c.208]
Дроссель (рис. П-52) предназначен для регулирования скорости движения механизма среза (движение должно быть медленным при подводе ножа к продукту и быстрым при выводе ножа из ротора центрифуги). Он устанавливается на трубопроводе, подводящем масло к нижней полости гидроцилиндра механизма среза. [c.95]
Регулирование скорости перемещения поршня в гидроцилиндре осуществляется объемным, дроссельным или комбинированным способом. [c.198]
В отстойных центрифугах типа ОГН на крышке кожуха установлен механизм отвода осветленной жидкости, состоящий из отводящей поворотной трубы, которая соединена рычажной системой с гидроцилиндром, и дросселя, служащего для регулирования скорости поворота отводящей трубы.
Шнек, находящийся в начале процесса в крайнем переднем положении, при работе под давлением резиновой смеси в мундштуке и литьевой камере отходит назад. При вращении шнека смесь подается в форму, а для регулирования скорости подачи материала задается определенный подпор давления в инжекционном цилиндре. Для этого применяется дроссель, регулирующий объемную скорость вытекания масла из гидроцилиндра под давлением резиновой смеси на шнек, либо напорный клапан, создающий определенное давление в гидроцилиндре. В последнем случае более четко фиксируется подпор. Теоретически подпор (особенно при полностью закрытом дросселе) может быть очень высоким, однако повышение его неизбежно вызывает резкое увеличение температуры смеси в витках шнека и в литьевой камере, что приводит к подвулканизации смеси. Подпор зависит от конфигурации рабочей полости в форме, размеров литьевых каналов (т. е. от гидравлического сопротивления формы), от вязкотекучих и вулканизационных свойств перерабатываемой резиновой смеси и температуры формы.
 После того как шнек переместится в определенное положение, [c.91]
После того как шнек переместится в определенное положение, [c.91]В отличие от фильтрующих, у осадительных центрифуг имеется механизм отвода фугата из ротора, состоящий из черпающей трубки с силовым гидроцилиндром, снабженным дросселем для регулирования скорости ввода трубки в ротор. У осадительных центрифуг нет клапанов промывки и регенерации, а также разделительных клапанов. [c.144]
Объемный способ регулирования скорости гидродвигателей заключается в применении регулируемых насосов и гидроцилиндров. Объемным этот способ называют потому, что регулирование скорости осуществляется путем изменения рабочих объемов насо- [c.241]
Используя регулирующую и направляющую аппаратуру и применив один из известных способов регулирования скорости, можно создавать различные приводы, выполняющие необходимые условия работы. На рис. 2.124 показан привод, обеспечивающий жесткую остановку гидродвигателя с использованием гидрозамка 3. При включении распределителя 5 с помощью электромагнитов Э1 я Э2 в левую или правую позицию жидкость своим потоком открывает гидрозамок, и совершается ход гидроцилиндра 4 влево или вправо со скоростью, определяемой открытием дросселя 6, подсоединенного на выходе гидроцилиндра. При включении распределителя 5в среднюю позицию (оба электромагнита Э1 и Э2 [c.246]
При включении распределителя 5 с помощью электромагнитов Э1 я Э2 в левую или правую позицию жидкость своим потоком открывает гидрозамок, и совершается ход гидроцилиндра 4 влево или вправо со скоростью, определяемой открытием дросселя 6, подсоединенного на выходе гидроцилиндра. При включении распределителя 5в среднюю позицию (оба электромагнита Э1 и Э2 [c.246]
Кроме того, в конструкции пресса должна быть предусмотрена система регулирования скорости и давления смыкания пресса, что важно для тех прессов, где связующее вводится локально и пропитывает наполнитель в процессе смыкания формы. Практически регулирование скорости осуществляется за счет изменения по специальной программе производительности насоса, подающего масло в цилиндр. В простейшем случае регулирование скорости смыкания достигается с помощью лекальной линейки, установленной на подвижной плите пресса и обкатываемой роликом механизма, изменяющего производительность насоса. Производительность насоса, а следовательно, и скорость смыкания может изменяться за счет изменения величины противодавления прессуемого материала при смыкании формы. В этом случае датчик на гидросистеме, связанной с рабочей полостью гидроцилиндра воздействует на механизм регулирования производительности. [c.38]
В этом случае датчик на гидросистеме, связанной с рабочей полостью гидроцилиндра воздействует на механизм регулирования производительности. [c.38]
Ротор осадительных центрифуг типа ОГН сплошной сварной. Конструкцией этих центрифуг, в отличие от фильтрующих, предусмотрен механизм отвода осветленной жидкости, состоящий из отводящей трубы с силовым гидроцилиндром и дросселем для регулирования скорости поворота отводящей трубы. У осадительных центрифуг отсутствуют разделительные клапаны, а также клапаны промывки и регенерации. [c.34]
В гидропередачах дроссельного регулирования частота враще-. ния нерегулируемого гидромотора, питаемого от насоса постоянной подачи или иного источника, регулируется дроссельными устройствами, устанавливаемыми обычно на входе или на выходе рабочей жидкости из гидромотора. Дроссель представляет собой местное гидравлическое сопротивление, устанавливаемое на пути течения жидкости для ограничения (регулирования) ее расхода или создания сопротивления (перепада давления). В гидроприводах дроссели применяют главным образом для регулирования скорости выходного звена гидродвигателей прямолинейного движения (штока силовых гидроцилиндров) или частоты вращения вала гидромоторов. [c.430]
В гидроприводах дроссели применяют главным образом для регулирования скорости выходного звена гидродвигателей прямолинейного движения (штока силовых гидроцилиндров) или частоты вращения вала гидромоторов. [c.430]
Регулирование скорости гидроцилиндра [c.499]
Пример. Рассчитать усилие R на штоке гидроцилиндра и скорость v его перемещ,ения при дроссельном регулировании. Сечение регулирующего дросселя /др = 3 мм давление в напорной магистрали р = 12 МПа (120 кгс/см ) (объемные и механические потери и давление в сливной магистрали не учитываем). Рабочая площадь поршня F = 25 см коэффициент расхода дросселя х = 0,7, удельный вес жидкости у = 0,85 гс/см . [c.501]
Принципиальная схема гидравлической передачи с центробежным регулятором скорости приведена на рис. 3.63, а. При изменении (рассогласовании) выходной скорости гидромотора, связанный с ним центробежный регулятор 1 воздействует на распределительный золотник 2, который подавая жидкость в гидроцилиндр 3 механизма регулирования производительности (угла наклона диска 4) насоса, устраняет рассогласование, поддерживая тем самым заданную выходную скорость передачи постоянной. [c.416]
[c.416]
Для того чтобы обеспечивался необходимый приток энергоносителя к двигателю при разных нагрузках, задвижка должна занимать разные положения. Соответственно разные установившиеся положения должен иметь и поршень 7 гидроцилиндра. Однако при всех установившихся положениях поршня гидроцилиндра золотник будет находиться в нейтральном положении. Следовательно, равновесное положение точки Е рычага ВЕС должно быть неизменным. Точка С этого рычага вместе со штоком поршня гидроцилиндра может занимать разные положения, в связи с чем процесс регулирования закончится при той угловой скорости вала двигателя, при которой муфта центробежного маятника (точка А) займет согласованное с точками и О положение. По схеме регулятора легко проследить, что при больших открытиях задвижки установившаяся угловая скорость вала двигателя будет меньше, чем при малых открытиях задвижки. Если построить зависимость установившейся угловой скорости вала двигателя от открытия задвижки, то получим статическую характеристику 1 (рис.
 1.5, б). Предположим, что в точке Р отключена обратная связь 6 и этот конец рычага закреплен на внешней опоре. Теперь золотник может занимать нейтральное положение при любом положении задвижки 9 и одном и том же положении муфты центробежного маятника, поэтому регулятор имеет возможность поддерживать одну и ту же постоянную угловую скорость вала двигателя при любом открытии задвижки (статическая характеристика 2 на рис. 1.5, б). [c.20]
1.5, б). Предположим, что в точке Р отключена обратная связь 6 и этот конец рычага закреплен на внешней опоре. Теперь золотник может занимать нейтральное положение при любом положении задвижки 9 и одном и том же положении муфты центробежного маятника, поэтому регулятор имеет возможность поддерживать одну и ту же постоянную угловую скорость вала двигателя при любом открытии задвижки (статическая характеристика 2 на рис. 1.5, б). [c.20] Исследование кинетики засоряемости фильтровальных тканей. На автоматизированной установке для исследования кинетики засоряемости фильтровальных тканей при использовании незначительных объемов суспензии можно провести многократное фильтрование, моделируя съем осадка с ткани в условиях патронного, листового фильтров (обратным током фильтрата),. ФПАКМа, механизированного друк-фильтра (ножом) и одновременно построить кривую кинетики накопления фильтрата. На этой установке можно за несколько часов получить надежные данные о реальной скорости фильтрования суспензии через один и тот же образец ткани после сотен циклов фильтрования. Установка (рис. 4-7) состоит из суспензатора 1 с мешалкой 4 и рубашкой для термостатирования суспензий. В корпусе суспензатора размещены съемный фильтровальный элемент 5, нож 6 для съема осадка, приводимый в движение пневмоприводом 7. В состав установки входят распределительный клапан 13 и сборник фильтрата 15. Фильтровальный элемент может располагаться горизонтально или вертикально. Сборник фильтрата 15 представляет собой гидроцилиндр с поршнем, на крышке которого закреплено приспособление 14 для замера объема фильтрата. Система автоматического регулирования состоит из пульта управления 10 с релейной схемой и командного устройства, состоящего из распределительного клапана 13, кнопочных выключателей КВ1—КВ5 и клапанов с электромагнитным приводом ЭК1—ЭК5. Запись кинетики процесса фильтрования осуществляется на вторичном приборе 12. Датчиком для измерения [c.191]
Установка (рис. 4-7) состоит из суспензатора 1 с мешалкой 4 и рубашкой для термостатирования суспензий. В корпусе суспензатора размещены съемный фильтровальный элемент 5, нож 6 для съема осадка, приводимый в движение пневмоприводом 7. В состав установки входят распределительный клапан 13 и сборник фильтрата 15. Фильтровальный элемент может располагаться горизонтально или вертикально. Сборник фильтрата 15 представляет собой гидроцилиндр с поршнем, на крышке которого закреплено приспособление 14 для замера объема фильтрата. Система автоматического регулирования состоит из пульта управления 10 с релейной схемой и командного устройства, состоящего из распределительного клапана 13, кнопочных выключателей КВ1—КВ5 и клапанов с электромагнитным приводом ЭК1—ЭК5. Запись кинетики процесса фильтрования осуществляется на вторичном приборе 12. Датчиком для измерения [c.191]
Технологические параметры при впрыске температура расплава на входе в форму, скорость заполнения и время полного заполнения формы. Эти параметры процесса сильно зависят от конфигурации изделия, размеров и формы литникового канала. Изменение их возможно путем регулирования температуры формы, давления в гидроцилиндре впрыска и скорости осевого перемещения шнека (времени впрыска). [c.115]
Эти параметры процесса сильно зависят от конфигурации изделия, размеров и формы литникового канала. Изменение их возможно путем регулирования температуры формы, давления в гидроцилиндре впрыска и скорости осевого перемещения шнека (времени впрыска). [c.115]
Распространены механизмы регулирования с гидравлическим приводом регулируемого элемента. Если требуется обеспечить реверс насоса или движение в одном направлении при двух скоростях, либо движение в двух направлениях с одной скоростью перемещения в каждом направлении, применяют гидравлические устройства с двумя гидроцилиндрами 1 (рис, 152, а), которые в большинстве случаев размещаются в корпусе насоса. Ход поршней ограничивается механическим ограничителем 3. Для управления гидроцилиндрами обычно применяют электромагнитные распределители 2. В случае необходимости установки и фиксации регулируемого элемента в промежуточном положении (обычно нулевой подачей) применяется схема с тандем-цилиндрами, приведенная на рис, 152, б. Для установки в указанное положение жидкость подводится в оба внешних цилиндра, поршеньки 4 которых фиксируют регулируемый элемент в соответствующем положении, [c.383]
Для установки в указанное положение жидкость подводится в оба внешних цилиндра, поршеньки 4 которых фиксируют регулируемый элемент в соответствующем положении, [c.383]
Одна из возможных схем подобных демпферов простейшего типа представлена на рис. 213, а. Поршень 4 снабжен цилиндрическим выступом 3 (с одной или с обеих его сторон), который перед концом хода поршня входит в камеру 6, запирая тем самым в сливной полости 5 гидроцилиндра некоторый объем жидкости. Нетрудно видеть, что скорость дальнейшего движения поршня 4 будет ограничена, поскольку блокированная (запертая) в полости 5 цилиндра жидкость должна быть выдавлена через дроссель 1 и через узкую радиальную щель (зазор), образованную выступом 3 и стенками камеры 6. В результате в этой полости создается противодавление, препятствующее движению поршня. С помощью дросселя / осуществляют регулирование эффективности демпфирования. [c.505]
Дроссель представляет собой местное гидравлическое сопротивление, устанавливаемое на пути течения жидкости для ограничения (регулирования) ее расхода или создания сопротивления (перепада давления). В гидроп)шводах они применяются главным образом для регулирования скорости выходного звена гидродвигателей прямолинейного движения (штока силовых гидроцилиндров) или числа оборотов вала гидромоторов. [c.439]
В гидроп)шводах они применяются главным образом для регулирования скорости выходного звена гидродвигателей прямолинейного движения (штока силовых гидроцилиндров) или числа оборотов вала гидромоторов. [c.439]
Кр 1 > о и статические характеристи ки привода определяются уравнением (13.92), согласно которому расход жидкости через золотник при одном и том жетоке управления будет изменяться с изменением перепада /з, давления в гидроцилиндре. Скорость движения порш1Ня гидроцилиндра также будет зависеть от действующей на шток нагрузки (сплошные линии на рис. 13.19). В отличие от привода, не имеющего обратной связи по расходу жидкости, в рассматриваемом приводе можно достичь меньшего изменения скорости поршня гидроцилиндра с изменением нагрузки. Объясняется это тем, что благодаря действию дополнительной обратной связи по расходу жидкости смещение золотника от нейтрали увеличивается или уменьшается и соответственно производится регулирование скорости движения поршня гидроцилиндра при постоянном токе управления. [c.405]
Максимапьное значение помогающей нагрузки F , до которой возможно регулирование скорости движения поршня гидроцилиндра, ограничено давлением настройки предохранительного клапана 7, включенного параллельно регулируемому гидродросселю 5. [c.203]
Агрегаты фирмы Бран-Люббе . Фирма Бран-Люббе комплектует свои агрегаты из следующих автономных узлов электродвигателя, привода бесступенчатого регулирования скорости (иногда два эти узла объединяются в один), насосных приводных секций и гидроцилиндров. [c.189]
Гидравлический привод (рис. 2.126) осушествляет раздельное регулирование скорости гидродвигателя при движении в обе стороны. Скорость движения поршня гидроцилиндра 3 с двусторонним штоком регулируется дросселем 8. Поршень гидроцилиндра 3 будет двигаться влево и вправо с одной скоростью V. Остановка поршня возможна в любом месте при переключении распределителя 2 в среднее положение (электромагниты Э1 и. 92должны быть в этом случае выключены). Поршень гидроцилиндра 4 с односторонним штоком может двигаться в обе стороны с разными скоростями г 1 и VI благодаря различной настройке дросселей аппаратов 248 [c.248]
Поршень гидроцилиндра 4 с односторонним штоком может двигаться в обе стороны с разными скоростями г 1 и VI благодаря различной настройке дросселей аппаратов 248 [c.248]
На рис. 147 показана принципиальная схема регулирования скорости поршня гидроцилиндра путем изменения рабочего объема аксиально-поршневого иасоса. При изменении угла у наклона оси шайбы относительно оси блока изменяется ход /г поршней и, соответственно, скорость и направление движения гидродвига- [c.381]
На основе схемы последнего многокамерного гидроцилиндра могут быть построены автоматические системы электрогидра-влического дискретного регулирования скорости гидромеханизмов. [c.514]
На рис. 214, в представлена схема одной из возможных дискретных систем с двумя подобными многокамерными гидроцилиндрами 7 и 9, порщни которых находятся на общем щтоке 8, связанным с нагрузкой. Регулирование скорости выходного звена гидромеханизма достигается подключением к питающему насосу с постоянной подачей, соответствующей комбинации камер (полостей) гидроцилиндров 7 и 9, имеющих различные объемы. Эти подключения осуществляются электромагнитными золотниками 10, управляемыми по заданной программе с помощью блока управления. Путем соответствующих комбинаций этих камер представляется возможным изменять в широких пределах текущую скорость выходного звена (штока 8) и осуществлять любой характер его движения — от разрывного до непрерывного. [c.514]
Эти подключения осуществляются электромагнитными золотниками 10, управляемыми по заданной программе с помощью блока управления. Путем соответствующих комбинаций этих камер представляется возможным изменять в широких пределах текущую скорость выходного звена (штока 8) и осуществлять любой характер его движения — от разрывного до непрерывного. [c.514]
Контрольно-регулирующие устройства. Контрольно-регули-рующие устройства предназначаются для контроля и регулирования скорости движения поршня в гидроцилиндре и регулирования давления масла в гидросистеме. [c.321]
Для расчета любой системы необходимо прежде всего составить математическое описание протекающих в ней физических процессов, т. е. получить математическую модель системы. При этом в системе могут быть предварительно выделены более простые подсистемы или элементы в соответствии с их функциональным назначением. Например, в системе автоматического регулирования угловой скорости вала двигателя (см.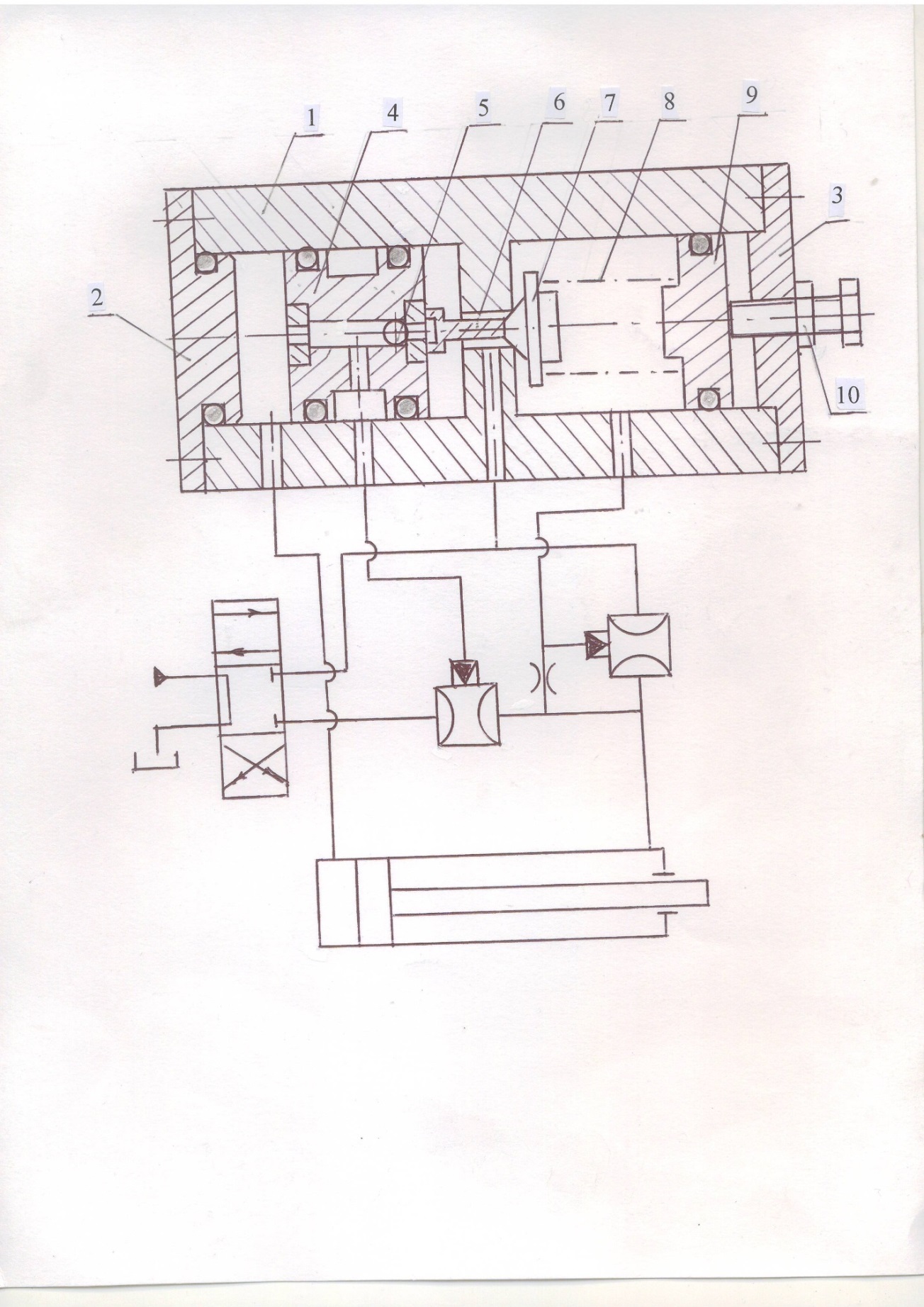 рис. Iv5) можно выделить следующие функциональные элементы чувствительный элемент (центробежный регулятор), усилитель и исполнительный элемент (золотник вместе с гидроцилиндром), обратная связь регулятора, регулируемый объект (двигатель, задвижка, нагружающая двигатель машина). В ряде случаев более целесообразным оказывается разделение системы на составные части не по функциональному признаку элементов, а по физическим процессам. Например, могут быть Е ыделены элементы или группа элементов, в которых протекают гидромеханические процессы, и группа элементов с электрическими процессами. Иногда удобно такие процессы, в свою очередь, представить в виде совокупности процессов, каждый из которых имеет более простое математическое описание. При любом из указанных подходов используют величины двух видов. К первому виду величин относятся зависимые от времени переменные, которые являются своего рода координатами, определяющими в обобщенном смысле этого понятия движение системы. Такими величинами могут быть перемещения деталей, давления и расходы жидкости или газа, сила и напряжение электрического тока, температуры каких-либо тел или сред и др.
рис. Iv5) можно выделить следующие функциональные элементы чувствительный элемент (центробежный регулятор), усилитель и исполнительный элемент (золотник вместе с гидроцилиндром), обратная связь регулятора, регулируемый объект (двигатель, задвижка, нагружающая двигатель машина). В ряде случаев более целесообразным оказывается разделение системы на составные части не по функциональному признаку элементов, а по физическим процессам. Например, могут быть Е ыделены элементы или группа элементов, в которых протекают гидромеханические процессы, и группа элементов с электрическими процессами. Иногда удобно такие процессы, в свою очередь, представить в виде совокупности процессов, каждый из которых имеет более простое математическое описание. При любом из указанных подходов используют величины двух видов. К первому виду величин относятся зависимые от времени переменные, которые являются своего рода координатами, определяющими в обобщенном смысле этого понятия движение системы. Такими величинами могут быть перемещения деталей, давления и расходы жидкости или газа, сила и напряжение электрического тока, температуры каких-либо тел или сред и др. [c.26]
[c.26]
На рис. 14.8, а приведена схема электрогидравлического следящего привода с объемным регулированием, в силовую часть которого входят насос 1 с приводом от электродвигателя 2 и гидромотор 3. Вал гидромотора через редуктор соединен с управляемым объектом 4. Вместо гидромотора может быть применен гидроцилиндр. В этом случс1е редуктор не используется. С валом гидромотора соединен также электрический датчик 5 обратной связи, напряжение на выходе которого изменяется пропорционально углу поворота вала гидромотора. Кроме этого датчика может еще устанавливаться электрический датчик угловой скорости вала. Сигнал ОТ датчика обратной связи поступает на вход усилителя 6, к выходу которого подключен электромеханический преобразователь 7, управляющий заслонкой гидравлического усилителя с золотником 8. Этот золотник, в свою очередь, управляет гидроцилинд- [c.434]
При движении поршня гидроцилиидра объем Уо изменяется, поэтому данная система является нестационарной. Применяя метод замороженных коэффициентов (см. параграф 4.6), можно исследовать систему как стационарную. Если, кроме того, ограничиться малыми отклонениями переменных,то,используя передаточную функцию (15.46) и преобразованные по Лапласу уравнения (15.47), (15.48), получим структурную схему, изображенную на рис. 15.5. Указанные на этой схеме величины Р (з), р (я), р (з), Ушт (з), (з) являются изображениями малых отклонений внешней силы, давлений в полостях гидроцилиндра, скорости выходного звена и расхода жидкосги. Устойчивость системы и качество регулирования проверяются описанными выше методами, причем следует иметь в виду, что расчеты должны быть выполнены для ряда значений Уд. [c.450]
Применяя метод замороженных коэффициентов (см. параграф 4.6), можно исследовать систему как стационарную. Если, кроме того, ограничиться малыми отклонениями переменных,то,используя передаточную функцию (15.46) и преобразованные по Лапласу уравнения (15.47), (15.48), получим структурную схему, изображенную на рис. 15.5. Указанные на этой схеме величины Р (з), р (я), р (з), Ушт (з), (з) являются изображениями малых отклонений внешней силы, давлений в полостях гидроцилиндра, скорости выходного звена и расхода жидкосги. Устойчивость системы и качество регулирования проверяются описанными выше методами, причем следует иметь в виду, что расчеты должны быть выполнены для ряда значений Уд. [c.450]
Каждый агрегат состоит из цепного вариатора скорости ВЦ с диапазоном регулирования 1 6, зубчатого конического редуктора и секций механизма регулирования гидроцилиндров, состоящих из червячных редукторов и механизмов изменения длины хода ллунжеров гидроцилиндров. [c. 28]
28]
Принципиальная схема гидропередачи с центробежным регулятором скорости приведена на рис. 187. Передача состонг из насоса 5, устанавливаемого на авиационном двигателе, и гидромотора 6, вал которого соединен с приводимым электрогенератором (нагрузкой). При изменении выходной скорости гидромотора связанный с ним центробежный регулятор I воздействует на распределительный золотник 2, который, подавая жидкость в гидроцилиндр 3 механизма регулирования подачи (угла наклона диска 4) насоса, устраняет рассогласование, поддерживая теи самым выходную скорость постоянной. [c.449]
Дроссельное регулирование скорости – Технарь
С помощью дроссельного регулирования обеспечивается ручное или автоматическое изменение подачи жидкости и соответственно скорости гидродвигателя. Частота вращения нерегулируемого гидромотора, питаемого от нерегулируемого насоса, регулируется дросселями, устанавливаемыми на входе или выходе рабочей жидкости из гидромотора. Дроссель представляет собой местное гидравлическое сопротивление, устанавливаемое на пути течения жидкости для ограничения (регулирования) ее потока путем создания сопротивления (перепада давления.) В гидроприводах дроссели применяют главным образом для регулирования скорости выходного звена гидродвигателей прямолинейного движения (силовых гидроцилиндров) или частоты вращения вала гидромоторов.
Дроссель представляет собой местное гидравлическое сопротивление, устанавливаемое на пути течения жидкости для ограничения (регулирования) ее потока путем создания сопротивления (перепада давления.) В гидроприводах дроссели применяют главным образом для регулирования скорости выходного звена гидродвигателей прямолинейного движения (силовых гидроцилиндров) или частоты вращения вала гидромоторов.
Способы включения дросселя в гидропривод: на входе (рис. 121, а) —дроссель установлен перед гидродвигателем на напорной гидролинии; на выходе (рис. 121, б) — дроссель установлен на сливной гидролинии, после гидродвигателя; на ответвлении (рис. 121, в) —дроссель расположен на напорной гидролинии параллельно гидродвигателю. При всех способах дроссельного регулирования часть жидкости, подаваемой насосом, отводится в сливную гидролинию, не совершая полезной работы.
Гидроприводы с дроссельным регулированием выполняются по двум схемам: с постоянным потоком жидкости и с постоянным давлением. Схема с постоянным давлением применяется в системах с автоматическим регулированием. Использование этой схемы дает возможность одновременной работы нескольких гидродвигателей от одного насоса независимо от внешней нагрузки каждого из гидродвигателей. При работе гидропривода с регулируемым насосом в схеме нет дополнительных устройств, а при работе с нерегулируемым насосом в систему устанавливается переливной гидроклапан, который непрерывно, перепуская часть рабочей жидкости во время работы, поддерживает заданное давление. Рассмотрим более подробно способы включения дросселя в схемах с постоянным потоком.
Схема с постоянным давлением применяется в системах с автоматическим регулированием. Использование этой схемы дает возможность одновременной работы нескольких гидродвигателей от одного насоса независимо от внешней нагрузки каждого из гидродвигателей. При работе гидропривода с регулируемым насосом в схеме нет дополнительных устройств, а при работе с нерегулируемым насосом в систему устанавливается переливной гидроклапан, который непрерывно, перепуская часть рабочей жидкости во время работы, поддерживает заданное давление. Рассмотрим более подробно способы включения дросселя в схемах с постоянным потоком.
Гидропривод с дросселем на входе (см. рис. 121, а) не обеспечивает постоянства скорости выходного звена, если нагрузка на нем переменная, а также при подаче жидкости в гидроцилиндр, имеющий значительный момент инерции. Под действием силы инерции движущейся массы дроссель 3 не противодействует. Эту схему нельзя применять в грузоподъемных устройствах, так как груз может упасть вследствие недостаточного противодействия сливной линии и сил трения поршня о стенки цилиндра.
Гидропривод с дросселем на выходе. При этой схеме в любом направлении движения штока под действием внешней нагрузки (см. рис. 121, б) не произойдет разрыва струи и падения груза. Тепло, выделяющееся при прохождении жидкости через дроссель, отводится непосредственно в гидробак, минуя гидрораспределитель и гидроцилиндр.
Гидропривод с дросселем на ответвлении (см. рис. 121, в). Рабочая жидкость, подаваемая насосом, не доходя до гидрораспределителя 4, разделяется на два потока, один из которых через гидрораспределитель направляется в гидроцилиндр, а второй через дроссель отводится в гидробак. Предохранительный клапан перепускает жидкость только в случае превышения нагрузки в гидроцилиндре. Поэтому гидросистема с дросселем на ответвлении экономичнее, чем системы с дросселем на входе или с дросселем на выходе. Скорость движения поршня можно регулировать изменением проходного сечения дросселя. При полностью открытом дросселе вся рабочая жидкость подается в гидроцилиндр, при этом используется максимальная скорость движения поршня гидроцилиндра или частота вращения вала гидромотора. При полностью закрытом дросселе движение гидроцилиндра прекращается.
При полностью закрытом дросселе движение гидроцилиндра прекращается.
КПД гидропривода с дроссельным регулированием мал, поскольку дроссельное регулирование основано на превращении части энергии в тепло, гидравлические схемы с этими регуляторами применяют обычно в системах небольшой мощности (до 5 кВт). Кроме регулирования потоков рабочей жидкости, подводимой к ведомому звену в приводах станков, необходимо реверсирование движения этого звена. В гидроприводах с выходным звеном — гидромотором — это будет вращение вала гидромотора по часовой стрелке или против, а в гидроприводах с выходным звеном — гидроцилиндром — возвратно-поступательное движение его штока. В гидроприводах с регулируемым и реверсируемым насосом реверсирование осуществляется отклонением вращающегося ротора или наклонного диска в одну или другую сторону от нейтрального положения. В гидроприводах с нерегулируемым и нереверсируемым насосом реверсирование осуществляется гидрораспределителями.
Рассмотрим подробнее две схемы простого дроссельного регулирования скорости. Гидросхема с дросселем, установленным на входе в полость б гидроцилиндра 4, представлена на рис. 122, а. Полость гидроцилиндра сообщается с гидробаком. Количество масла, поступающего через дроссель 3 в полость б гидроцилиндра, а следовательно, и скорость перемещения поршня определяются проходным сечением дросселя и перепадом (разностью) давлений между нагнетательной гидролинией а и полостью б. Избыток нагнетаемого насосом 2 масла, превышающий поток через дроссель, сливается в гидробак 1 через переливной клапан 6. Гидравлическое реле давления 5 выдает электрический сигнал после остановки штока гидроцилиндра и достижения в полости б давления р1. Кроме слива в гидробак масла, не используемого для полезной работы, переливные клапаны предназначены для ограничения максимального давления в линии нагнетания.
Гидросхема с дросселем, установленным на входе в полость б гидроцилиндра 4, представлена на рис. 122, а. Полость гидроцилиндра сообщается с гидробаком. Количество масла, поступающего через дроссель 3 в полость б гидроцилиндра, а следовательно, и скорость перемещения поршня определяются проходным сечением дросселя и перепадом (разностью) давлений между нагнетательной гидролинией а и полостью б. Избыток нагнетаемого насосом 2 масла, превышающий поток через дроссель, сливается в гидробак 1 через переливной клапан 6. Гидравлическое реле давления 5 выдает электрический сигнал после остановки штока гидроцилиндра и достижения в полости б давления р1. Кроме слива в гидробак масла, не используемого для полезной работы, переливные клапаны предназначены для ограничения максимального давления в линии нагнетания.
Равенство сил, действующих на поршень гидроцилиндра, может быть выражено уравнением:
p1S1 = p2S2 + F + FT
где p1 — давление в полости б, Па; p2 — давление в полости в, Па;
S1 — Рабочая площадь гидроцилиндра со стороны полости б, м2;
S2 — рабочая площадь гидроцилиндра со стороны полости в, м2;
F — нагрузка (сила) на шток гидроцилиндра от внешних сил, Н;
FT — сила трения в уплотнениях гидроцилиндра и поршня о стенки гидроцилиндра, Н.
Перепад давления, т. е. разность давлений до и после дросселя:
∆pДР = pH – p1
где pH — давление настройки предохранительного клапана.
По мере возрастания силы F, действующей на шток гидроцилиндра, увеличивается давление p1 в передней полости гидроцилиндра, в результате чего уменьшается перепад давления на дросселе ∆pДР, поток масла через дроссель и, следовательно, скорость перемещения поршня гидроцилиндра. При установке дросселя 3 на выходе из полости в гидроцилиндре (см. рис. 122, б) в полости б давление остается постоянным и равным p1 = pH, при этом равенство сил, действующих на поршень гидроцилиндра, определяется уравнением:
pHS1 = p2S1 + F + FT или pHS1 = ∆pДРS2 + F + FT (так как p2 = ∆pДР)
откуда
∆pДР = pHS1/S2 – (F + FT)/ S2
Таким образом, и в этом случае при увеличении нагрузки уменьшаются ∆pДР и скорость перемещения поршня гидроцилиндра.
Поскольку простые дроссельные системы не обеспечивают постоянства скорости выходного звена при изменении внешней нагрузки, их применяют только в гидроприводах, работающих при малоизменяющихся нагрузках, или тогда, когда в процессе работы допустимы изменения скорости (в основном в гидроприводах различных вспомогательных устройств).
Математическое моделирование преобразователя скорости перемещения штока гидроцилиндра с цилиндрическим мембранным запорно-регулирующим элементом
АННОТАЦИЯ
В данной статье рассмотрен один из вариантов увеличения производительности гидрофицированных машин и оборудования циклического действия при постоянном расходе жидкости источника гидравлического питания. Для этого рассматривается система управления исполнительными гидроцилиндрами использования преобразователя скорости перемещения штоков гидроцилиндров, которая устанавливается между гидроцилиндром и гидрораспределителем его управления. Представлена принципиальная гидравлическая схема системы управления гидроцилиндром при помощи преобразователя скорости перемещения штока гидроцилиндра. В качестве преобразователя скорости перемещения штока гидроцилиндра рассмотрен цилиндрический мембранный запорно-регулирующий элемент. Разработаны расчетные схемы, в соответствии с расчетной схемой разработано математическое моделирование и при этом были приняты некоторые общепринятые для гидравлического привода допущения, которые не вносят существенных изменений.
Представлена принципиальная гидравлическая схема системы управления гидроцилиндром при помощи преобразователя скорости перемещения штока гидроцилиндра. В качестве преобразователя скорости перемещения штока гидроцилиндра рассмотрен цилиндрический мембранный запорно-регулирующий элемент. Разработаны расчетные схемы, в соответствии с расчетной схемой разработано математическое моделирование и при этом были приняты некоторые общепринятые для гидравлического привода допущения, которые не вносят существенных изменений.
Для определения площади поперечного сечения канала, образованного при радиальной деформации цилиндрической мембраны под действием давления жидкости разработана расчетная схема, в которой представлена эпюра действующих сил на мембрану и его эквивалентная схема. В соответствии с представленной расчетной схемой площадь сечения канала, образованного при деформации мембраны, определяется диаметром мембраны и радиальным перемещением середины его длины, образующейся в процессе деформации.
Разработанная математическая модель системы управления исполнительным гидроцилиндром при помощи преобразователя скорости перемещения штока позволяет численно исследовать влияние гидравлических и конструктивных параметров преобразователя скорости перемещения штока гидроцилиндра на его статические и динамические параметры, а также оценить степень повышения эффективности использования мощности гидравлического привода, оснащенного данным гидроаппаратом.
ABSTRACT
The article considers one of the options for increasing the productivity of hydroficated machines and equipment of the cyclic operation at a constant flow rate of the hydraulic fluid supply source. To this end, the executive control system of hydraulic cylinders of reductor use of moving hydraulic-cylinder rods is considered, which is installed between the cylinder and directional control valve of its operation. Hydraulic circuit diagram of the control system by means of the reductor of moving hydraulic-cylinder rods is presented. As a reductor of moving hydraulic-cylinder rod, the cylindrical membrane shut-off-and-regulating element is considered. Calculation models are introduced, in accordance with the analytic model, mathematical modeling is developed, and some conventional conditions for hydraulic drive are accepted that do not make significant changes.
As a reductor of moving hydraulic-cylinder rod, the cylindrical membrane shut-off-and-regulating element is considered. Calculation models are introduced, in accordance with the analytic model, mathematical modeling is developed, and some conventional conditions for hydraulic drive are accepted that do not make significant changes.
To determine the duct area formed by a cylindrical radial deformation of the membrane under the action of fluid pressure, the calculation scheme is developed, which is represented by the diagram of forces acting on the membrane and its equivalent circuit. According to the presented calculation scheme, sectional area of the channel formed by the membrane deformation is determined by the diameter of the membrane and the radial movement of the middle of its length, resulting in the deformation process.
The developed mathematical model of the executive cylinder control system with reductor of the moving rod allows numerically investigate the influence of hydraulic and structural parameters of the velocity transducer displacement cylinder rod in its static and dynamic parameters, as well as to evaluate the degree of efficiency increase of a hydraulic drive power use equipped with the hydraulic valve.
При работе большинства гидрофицированных машин и оборудования циклического действия, в начале цикла штоки исполнительных гидроцилиндров выдвигаются без нагрузки, и только в конце хода нагрузка в них возрастает и достигает максимального значения. В связи с этим для сокращения продолжительности цикла и повышения производительности необходимо при малых значениях нагрузки на штоках обеспечить дифференциальную схему подключения гидроцилиндров к гидросистеме, а при увеличении и достижении нагрузки на штоках максимальной величины схему подключения гидроцилиндров переводить в обычный режим. В результате этого будет обеспечиваться двухскоростное перемещение штоков гидроцилиндров при постоянном расходе жидкости источника гидравлического питания. Такая система управления исполнительными гидроцилиндрами может быть реализована при использовании преобразователя скорости перемещения штоков гидроцилиндров, которая устанавливается между гидроцилиндром и гидрораспределителем его управления.
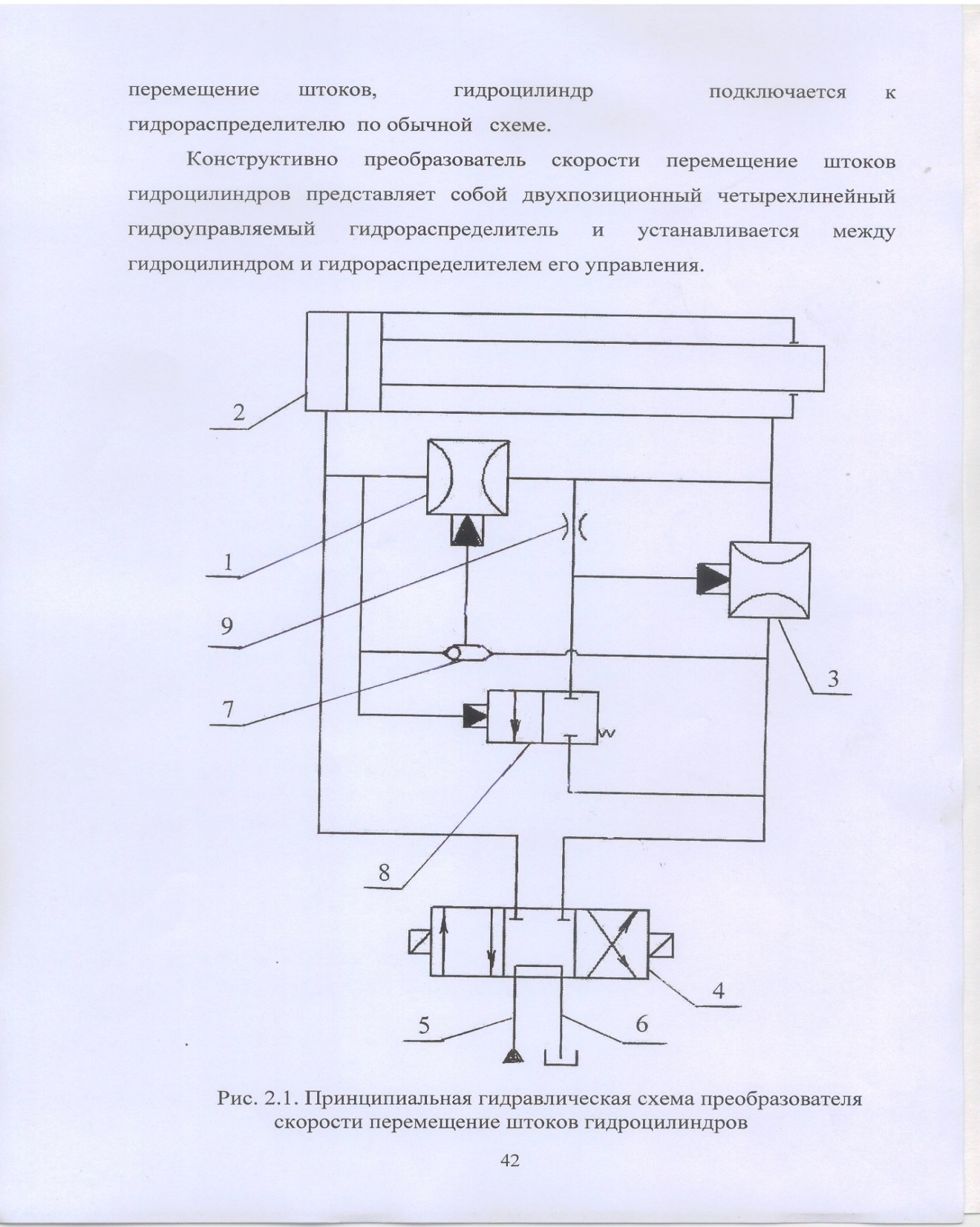
Принципиальная гидравлическая схема системы управления гидроцилиндром при помощи преобразователя скорости перемещения штока гидроцилиндра представлена на рис. 1. Гидравлическая система управления гидроцилиндром включает в себя: источник гидравлического питания 1 со сливом 2, гидрораспределитель 3 управления гидроцилиндром 4, преобразователь скорости 5, установленный между гидрораспределителем 3 и гидроцилиндром 4 и состоящий из гидроуправляемых дросселей 6 и 7, двухпозиционного двухлинейного гидроуправляемого гидрораспределителя 8, постоянного дросселя 9 и логического клапана «ИЛИ» 10.
Преобразователь скорости перемещения штока гидроцилиндра, как и все другие гидроаппараты, представляет собой достаточно сложную динамическую систему, поэтому для обоснования и оптимизации его параметров необходимо рассматривать в комплексе с гидравлическим приводом и исполнительным гидроцилиндром.
Рисунок 1. Принципиальная гидравлическая схема системы управления гидроцилиндром при помощи преобразователя скорости
перемещения штока
Для решения задач анализа и синтеза мембранных гидроаппаратов с целью оптимизации ее параметров на стадии проектирования, необходимо располагать описанием поведения мембранного запорно-регулирующего элемента в зависимости от результирующих сил, действующих на нее. Это позволит провести теоретические исследования гидроаппаратов с мембранными запорно-регулирующими элементами. При разработке математической модели процесса работы гидроаппарата с мембранными запорно-регулирующими элементами достаточно сложно добиться абсолютного подобия физическому оригиналу из-за сложности протекающих в них процессов и невозможности учета всех факторов. Поэтому процесс математического моделирования может быть упрощен, если рассматриваемую динамическую систему условно разделить на более простые подсистемы в соответствии с их функциональным назначением.
Это позволит провести теоретические исследования гидроаппаратов с мембранными запорно-регулирующими элементами. При разработке математической модели процесса работы гидроаппарата с мембранными запорно-регулирующими элементами достаточно сложно добиться абсолютного подобия физическому оригиналу из-за сложности протекающих в них процессов и невозможности учета всех факторов. Поэтому процесс математического моделирования может быть упрощен, если рассматриваемую динамическую систему условно разделить на более простые подсистемы в соответствии с их функциональным назначением.
Основным элементом, определяющим динамические характеристики преобразователя скорости перемещения штока гидроцилиндра, является мембранный запорно-регулирующий элемент. В рассматриваемом гидроаппарате мембранный запорно-регулирующий элемент является цилиндрическим, и практическое отсутствие релаксации напряжений в материале мембраны, которое установлено в процессе экспериментальных и ресурсных исследований мембранных гидроаппаратов [1; 2], предопределило замену упругих связей реальной мембраны конечным множеством упругих связей.
Точность математического описания цилиндрического мембранного запорно-регулирующего элемента в основном зависит от количества упругих связей, на которое разбита реальная мембрана, требуемой точности моделирования и функционального назначения гидроаппарата.
В процессе математического моделирования были приняты некоторые общепринятые при расчете гидравлического привода допущения, которые не вносят существенных изменений и заключаются в следующем:
- волновые процессы в трубопроводах не рассматриваются;
- потери давления жидкости по длине трубопроводов пренебрежительно малы по сравнению с потерями давления в местных сопротивлениях;
- коэффициент вязкости и модуль упругости жидкости – величины постоянные, нерастворенный воздух в жидкости отсутствует;
- внутренние утечки жидкости в гидроцилиндре и в преобразователе скорости перемещения штока гидроцилиндра отсутствуют;
- температура рабочей жидкости постоянна;
- масса мембраны, шарика логического клапана «ИЛИ» и клапана распределителя управляющего каскада пренебрежимо мала;
- изменение внешней нагрузки на штоке гидроцилиндра задано в виде функции.


В соответствии с принятыми допущениями расчетная схема преобразователя скорости представлена на рис. 2. Согласно расчетной схеме, внешняя нагрузка на штоке приложена в виде изменяющейся функции F и массы m.
Рисунок 2. Расчетная схема преобразователя скорости перемещение
штока гидроцилиндра
Уравнение динамического равновесия сосредоточенной массы m можно записать в виде:
где: m – приведенная к штоку гидроцилиндра масса;
соответственно ускорение, скорость и перемещение сосредоточенной массы m;
k – коэффициент вязкого сопротивления при перемещении штока гидроцилиндра;
F – внешнее сопротивление на штоке гидроцилиндра;
диаметр поршня гидроцилиндра;
диаметр штока гидроцилиндра;
рп – давление жидкости в поршневой полости гидроцилиндра;
рш – давление жидкости в штоковой полости гидроцилиндра.
Для исследования и оптимизации параметров преобразователя скорости перемещения штока гидроцилиндра внешнее сопротивление на штоке гидроцилиндра может быть задано в виде линейной функции
F = c x, (2)
где: c – коэффициент, учитывающий изменение внешнего сопротивления по мере выдвижения штока гидроцилиндра;
x – перемещение штока гидроцилиндра.
Движущая сила на штоке гидроцилиндра определяется значением давления жидкости в поршневой и штоковой полостях, которые, в свою очередь, определяются решением следующих уравнений
(3)
(4)
где: Qп – расход жидкости, поступающей в поршневую полость гидроцилиндра;
Qш – расход жидкости, поступающей в штоковую полость гидроцилиндра;
Еж – объемный модуль упругости жидкости;
Vтр – объем рабочей жидкости в трубопроводе от гидрораспределителя до гидроцилиндра и в полостях преобразователя скорости перемещение штока гидроцилиндра.
Расход жидкости, поступающей в поршневую полость гидроцилиндра, определяется следующим выражением
Qцп = Qн – Qкл – Qупр – Qмзэ , (5)
где: Qн – фактический расход жидкости гидронасоса;
Qкл – расход жидкости, затрачиваемый на переключение логического клапана;
Qупр – расход жидкости, затрачиваемый на включение распределителя управляющего каскада преобразователя;
Qмзэ – расход жидкости перетекающий через цилиндрический мембранный запорно-регулирующий элемент.
Расход жидкости гидронасоса определяется рабочим объемом насоса и частотой вращения его вала:
Qц п = q n, (6)
где: q – рабочий объем гидронасоса; n – частота вращения вала гидронасоса;
рт – текущее значение давления жидкости в гидросистеме;
рн – номинальное давление жидкости в гидросистеме;
– КПД гидронасоса.
Для упрощения математической модели процесса работы рассматриваемого преобразователя скорости перемещения штока гидроцилиндра, расходами жидкости, затрачиваемыми на переключение логического клапана «ИЛИ» и гидрораспределителя управляющего каскада можно пренебречь, так как их значения на несколько порядков меньше значения расхода гидронасоса.
Расход жидкости через цилиндрический мембранный запорно-регулирующий элемент определяется зависимостью
(7)
где: S – площадь поперечного сечения канала, образованного при открытии цилиндрического мембранного запорно-регулирующего элемента;
плотность рабочей жидкости;
µ – коэффициент расхода жидкости.
Для определения площади поперечного сечения канала, образованного при радиальной деформации цилиндрической мембраны под действием давления жидкости, разработана расчетная схема, в которой представлена эпюра действующих сил на мембрану, и ее эквивалентная схема (рис. 3). В соответствии с представленной расчетной схемой площадь сечения канала, образованного при деформации мембраны, определяется диаметром мембраны и радиальным перемещением середины его длины, образующей в процессе деформации
3). В соответствии с представленной расчетной схемой площадь сечения канала, образованного при деформации мембраны, определяется диаметром мембраны и радиальным перемещением середины его длины, образующей в процессе деформации
(8)
где: zм – радиальное перемещение середины длины образующей мембраны при его деформации;
dм – наружный диаметр мембраны.
Рисунок 3. Эпюра действующих сил на цилиндрическую
мембрану и ее эквивалентная схема
При определении радиального перемещения середины длины образующей для упрощения математической модели можно пренебречь сопротивлением упругих элементов, расположенных по образующей в процессе радиальной деформации мембраны. Такое допущение принято на основании того, что в диапазоне возможных значений радиальных деформаций мембраны, удельный вес сопротивлений от упругих элементов, расположенных по образующей мембраны, на порядок меньше сопротивлений от упругих элементов, расположенных по окружности мембраны в процессе формирования результирующей силы, действующей на мембрану. Поэтому такое допущение не внесет существенных искажений в процесс математического описания, в то же время существенно упростит математическую модель и процесс его исследования.
Поэтому такое допущение не внесет существенных искажений в процесс математического описания, в то же время существенно упростит математическую модель и процесс его исследования.
Зависимость сопротивления упругих элементов, расположенных по окружности мембраны в процессе ее деформации, можно записать в следующем виде
(9)
где: Ем – модуль упругости материала мембраны;
bм – длина образующей мембраны;
dм – толщина мембраны;
zм – радиальное перемещение середины образующей мембраны при ее деформации.
Обобщенная сила, действующая на мембрану, определяется перепадом давления на нее. При этом, допуская постоянство давления потока жидкости на участках подвода и отвода, обобщенную силу можно записать в виде
(10)
Приравняв уравнения (9) и (10) между собой, получим уравнение равновесия мембраны под действием перепада давления и сопротивления упругих элементов, расположенных по окружности мембраны
(11)
Радиальное перемещение середины образующей мембраны в процессе ее деформации определяется перепадом давления и значением обобщенной силы, действующей на мембрану.
(12)
Расход жидкости, поступающей в управляющую полость мембраны, определяется зависимостью
, (13)
где: f1 – площадь сечения постоянного дросселя, установленного на гидролинии, соединяющей логический клапан «ИЛИ» с управляющей полостью мембраны;
рупр – давление жидкости в управляющей полости мембраны.
Давление жидкости в штоковой полости гидроцилиндра определяется разностью расходов жидкости, вытесняемой из штоковой полости, и расходом жидкости через мембранный запорно-регулирующий элемент, и его текущее значение может быть определено решением следующего уравнения
, (14)
где: V1 – объем жидкости в трубопроводах, соединяющих гидрораспределитель со штоковой полостью гидроцилиндра.
Давление жидкости в управляющей полости мембранного запорно-регулирующего элемента определяется решением следующего уравнения
(15)
где: Vупр – объем управляющей полости мембранного запорно-регулирующего элемента преобразователя скорости перемещения штока гидроцилиндра;
Qдр – расход жидкости через постоянный дроссель, установленный на гидролинии, соединяющей штоковую полость гидроцилиндра с управляющей полостью;
Qр – расход жидкости через двухлинейный двухпозиционный гидрораспределитель.
Расход жидкости через постоянный дроссель определяется площадью сечения дросселя и перепадом давления на нем
(16)
где: dдр – диаметр сечения постоянного дросселя.
Таким образом, разработанная математическая модель системы управления исполнительным гидроцилиндром при помощи преобразователя скорости перемещения штока позволяет численно исследовать влияние гидравлических и конструктивных параметров преобразователя скорости перемещения штока гидроцилиндра на его статические и динамические параметры, а также оценить степень повышения эффективности использования мощности гидравлического привода, оснащенного данным гидроаппаратом.
Список литературы:
1. Джылкичиев А.И. Технология и оборудование для производства изделий полусухим способом формования. – Бишкек, 2001. – 245 c.
2. Джылкичиев А.И., Понамарева О.М. Экспериментальные исследования прочностных характеристик плоского мембранного запорно-регулирующего элемента // Повышение эффективности транспортных, строительно-дорожных машин и оборудования в условиях высокогорья: сб.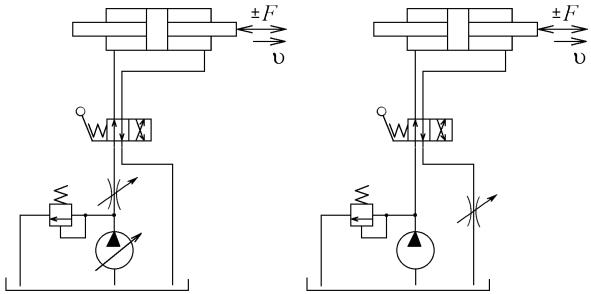 науч. тр. КГУСТА. – Бишкек, 1999. – С. 18–20.
науч. тр. КГУСТА. – Бишкек, 1999. – С. 18–20.
References:
1. Djulkuchiev A.I.. Technology and equipment for producing of half-dry methods of forming of products. Bishkek. 2001, 245 p. (In Russian).
2. Djulkuchiev A.I., Ponamareva O.M. Experimental research of stability characteristics trivial membrane, locked-regulated element. Povyshenie effektivnosti transportnykh, stroitel’no-dorozhnykh mashin i oborudovaniia v usloviiakh vysokogor’ia. Sbornik nauchnykh trrudov KGUSTA [Road-construction-machines and equipment in condition of high mountainous places. Collection of scientific works of KSUCTA]. Bishkek. 1999, pp. 18–20. (In Russian).
Обеспечение заданного режима и цикла работы гидропривода
Описание
Обеспечения заданного режима и цикла работы гидропривода
При создании гидропривода, разработчик должен, в соответствии с требованиями задачи на проектирование, обеспечить требуемый режим работы исполнительного гидродвигателя, выходное звено которого (шток гидроцилиндра, вал гидромотора), должно перемещения на требуемую величину, с определенной скоростью, и развивать при этом необходимое усилие, которые как правило, меняются в течении цикла работы. При этом, условия работы насосного агрегата, определяемые величиной давления и расхода, создаваемыми в течении цикла работы гидропривода, должны обеспечивать нормальный температурный режим используемой рабочей жидкости – масла.
При этом, условия работы насосного агрегата, определяемые величиной давления и расхода, создаваемыми в течении цикла работы гидропривода, должны обеспечивать нормальный температурный режим используемой рабочей жидкости – масла.
Наиболее часто в гидроприводе с одним гидродвигателем, например гидроцилиндром, используется покупная гидростанция с насосом постоянной производительности, а в задаче на проектирование требуется обеспечить быстрый подвод штока гидроцилиндра на участке 90% от общей величины хода S с усилием, позволяющим преодолеть только трение, возникающее при перемещении подвижных частей приводимого механизма, а на участке 10% от общей величины обеспечить медленный ход штока гидроцилиндра с номинальным усилием, которое он развивает при заданном давлении поступающего в его поршневую полость масла от гидростанции. В этом случае при величине хода штока гидроцилиндр S ≥ 10d и соотношении диаметра поршня к диаметру штока гидроцилиндра D/d ≥ 2 наиболее простым в части реализации и достаточно эффективным приемом является дифференциальное подключение гидроцилиндра, при котором, масло от насоса одновременно подается в поршневую и штоковую полости гидроцилиндра.
Рис 1 Схема гидропривода с дифференциальным подключением исполнительного гидроциилиндра
На Рис. 1 показана схема гидропривода с дифференциальным подключением исполнительного гидроцилиндра. В исходном положении гидрораспределитель Р2 выключен и масло от насоса Н свободно идет на слив, не поступая в полости
гидроцилиндра Ц. При включении гидрорпаспределителя Р2 и нахождении гидрораспределителя Р1 в нейтральном положении (электромагниты Э1 и Э2 выключены) слив масла от насоса Н прекращается и оно через гидрораспределитель Р1, обеспечивающий дифференциальное подключение полостей гидроцилиндра Ц, поступает в его поршневую полость. В тоже время масло из штоковой полости гидроцилинда Ц, ввиду того, что площадь его поршневой полости больше площади штоковой полости, через гидрораспределитель Р1, также поступает в поршневую полость гидроцилиндра Ц.
Рассмотренная схема, давая возможность получить два скоростных режима движения штока гидроцилиндра при его выдвижении и одну скорость при втягиван,и не может обеспечить конкретную скорость этих перемещений, поскольку она зависит не только от производительности насоса, но и от диаметров поршня D и штока d, которые при дифференциальном подключении гидроцилиндра устанавливаются первый на основе расчета потребного усилия, а второй на основе прочностного расчета. Поэтому, когда требуется обеспечить конкретную скорость перемещения штока гидроцилиндра, как при прямом, так и при обратном ходе совместно с дифференциальным подключением гидроцилиндра может быть использовано дроссельное регулирование потока масла поступающего, или сливающегося из рабочих полостей гидроцилиндра.
Поэтому, когда требуется обеспечить конкретную скорость перемещения штока гидроцилиндра, как при прямом, так и при обратном ходе совместно с дифференциальным подключением гидроцилиндра может быть использовано дроссельное регулирование потока масла поступающего, или сливающегося из рабочих полостей гидроцилиндра.
Рис. 2. Схема управления гидроцилиндром имеющим различные скорости перемещения
На Рис 2 показана гидросхема управления гидроцилиндром, позволяющая с использованием его дифференциального подключения и системы гидрораспределителей и дросселей обеспечить различные скорости перемещения штока при прямом и обратном ходе. Различные скорости перемещения штока гидроцилиндра обеспечиваются следующим образом. При включении электромагнита Э1 гидрораспределитель Р1 переключается в правое положение и масло из напорной магистрали поступает в поршневую полость гидроцилиндра Ц, поршень которого, перемещаясь вправо, вытесняет масло из штоковой полости, а поскольку гидроцилиндр подключен по дифференциальной схеме, это масло также поступает в поршневую полость, увеличивая тем самым скорость перемещения поршня со штоком. Когда в определенный момент рабочего цикла необходимо снизить скорость перемещения штока включается электромагнит Э3 и переключает гидрораспрепределитель Р2 в правое положение, при котором, масло из штоковой полости гидроцилиндра Ц идет не по дифференциальной схеме в его поршневую полость, а сливается через гидрораспределитель Р3, электромагнит Э4 которого в этом случае выключен. При этом возрастает усилие на штоке гидроцилиндра Ц. В конце хода штока гидроцилиндра Ц его скорость перемещения еще раз снижается, для этого включается электромагнит Э4, что приводит к переключению гидрораспределителя Р3 в правое положение, при котором масло из штоковой полости гидроцилиндра Ц сливается через дроссель Д, при этом, усилие на штоке остается неизменным. Возврат штока гидроцилиндра Ц в исходное положение осуществляется с постоянной скоростью при включении электромагнита Э2 и выключении электромагнитов Э1, Э3 и Э4, что приводит к переключения гидрораспределителей Р1, Р2, Р3 в левое положение и масло из напорной магистрали через гидрораспределитель Р1 подается в штоковую полость гидроцилиндра Ц и сливается из его поршневой полости .
Когда в определенный момент рабочего цикла необходимо снизить скорость перемещения штока включается электромагнит Э3 и переключает гидрораспрепределитель Р2 в правое положение, при котором, масло из штоковой полости гидроцилиндра Ц идет не по дифференциальной схеме в его поршневую полость, а сливается через гидрораспределитель Р3, электромагнит Э4 которого в этом случае выключен. При этом возрастает усилие на штоке гидроцилиндра Ц. В конце хода штока гидроцилиндра Ц его скорость перемещения еще раз снижается, для этого включается электромагнит Э4, что приводит к переключению гидрораспределителя Р3 в правое положение, при котором масло из штоковой полости гидроцилиндра Ц сливается через дроссель Д, при этом, усилие на штоке остается неизменным. Возврат штока гидроцилиндра Ц в исходное положение осуществляется с постоянной скоростью при включении электромагнита Э2 и выключении электромагнитов Э1, Э3 и Э4, что приводит к переключения гидрораспределителей Р1, Р2, Р3 в левое положение и масло из напорной магистрали через гидрораспределитель Р1 подается в штоковую полость гидроцилиндра Ц и сливается из его поршневой полости .
Рис 3 Схема управления гидроцилиндром, позволяющая получить различные скорости перемещения его штока при движении вперед и назад.
На Рис 3 показана гидросхема управления гидроцилиндром, позволяющая получить различные скорости перемещения его штока при движении, как вперед, так и назад. Получение различных скоростей перемещения штока гидроцилиндра реализуется следующим образом. При включении электромагнитов Э1 и Э3 масло через гидрораспределитель Р1 поступает в поршневую полость гидроцилиндра Ц, а из его штоковой полости масло через гидрораспределитель Р2 по дифференциальной схеме также поступает в поршневую полость, увеличивая скорость перемещения поршня со штоком. При выключении электромагнита Э3 масло из штоковой полости гидроцилиндра не поступает в поршневую полость, а идет на слив и скорость перемещения штока снижается, а усилие на штоке увеличивается. Для получения еще более медленной скорости перемещения штока гидроцилиндра включается электромагнит Э4, что приводит к переключению гидрораспределителя Р3 в левое положение и сливу масла из штоковой полости гидроцилиндра Ц через дроссель Д1. Для возврата штока в исходное положение включается электромагнит Э2 и выключается электромагнит Э4, что приводит к переключению гидрораспределителя Р1 в правое положение и поступлению масла из напорной магистрали в штоковую полость гидроцилиндра Ц и сливу из его поршневой полости, через гидрораспределитель Р3 находящийся в нейтральном положении. Для получения более медленной скорости возврата штока гидроцилиндра Ц включается электромагнит Э5 гидрораспределителя Р3 и масло из поршневой полости гидроцилиндра Ц начинает сливаться через гидрораспределитель Р3 находящийся в правом положении и дроссель Д2, который определяет скорость перемещения штока гидроцилиндра
Для возврата штока в исходное положение включается электромагнит Э2 и выключается электромагнит Э4, что приводит к переключению гидрораспределителя Р1 в правое положение и поступлению масла из напорной магистрали в штоковую полость гидроцилиндра Ц и сливу из его поршневой полости, через гидрораспределитель Р3 находящийся в нейтральном положении. Для получения более медленной скорости возврата штока гидроцилиндра Ц включается электромагнит Э5 гидрораспределителя Р3 и масло из поршневой полости гидроцилиндра Ц начинает сливаться через гидрораспределитель Р3 находящийся в правом положении и дроссель Д2, который определяет скорость перемещения штока гидроцилиндра
Рис. 4. Схема управления гидроцилиндром, имеющим одинаковые скорости перемещения вперед и назад
На Рис 4 показана гидросхема управления гидроцилиндром, позволяющая получить одинаковые, минимально возможные скорости перемещения его штока при движении, как вперед, так и назад. Для управления гидроцилиндром Ц с поршневой полостью 2 и штоковой 3 эта гидросхема содержит следующие функциональные элементы, электроуправляемый гидрораспределитель Р1 с электормагнитами Э1 и Э2, гидрораспределители Р2 и Р3 с гидравлическими подводами управления П1 и П2, электроуправляемый гидрораспрепделитель Р4 с электормагнитом Э3, регулятор потока РП и систему соединяющих их магистралей 13 – 26.
Работает гидропривод следующим образом. При включении электромагнита Э1 гидрораспределитель Р1 переключается в левое положение и масло по магистралям 13 и 14 поступает в полости управления П1Р2 и П1Р3 переключая гидрораспределители Р2, Р3 в левое положение. При этом, масло по напорной магистрали 15, через гидрораспределитель Р2, магистраль 16 и 17, гидрораспределитель Р3, магистраль 18, регулятор потока РП, магистраль 19, гидрораспределитель Р3 и магистрали 20 и 21 поступает в поршневую полость 2 гидроцилиндра Ц. А масло вытесняемое из штоковой полости 3 гидроцилиндра Ц по магистрали 22, через гидрораспределитель Р2, по магистрали 23, суммируясь с потоком масла от напорной магистрали 15, также поступает а поршневую полость 2 гидроцилиндра Ц, который в данном случае подключен по дифференциальной схеме и перемещает его шток вправо. При этом скорость перемещения поршня гидроцилиндра Ц вправо определяется настройкой регулятора потока РП подключенного на «вход» в поршневую полости 2 гидроцилиндра Ц. При включении электромагнита Э3 гидрораспределителя Р4 масло в поршневую полость 2 гидроцилиндра Ц поступает минуя регулятор потока РП, что увеличивает скорость перемещения поршня. При включении электромагнита Э2 и выключении Э1гидрораспределителя Р1 и электромагнита Э3 гидрораспределителя Р4 масло от гидрораспределителя Р1 по магистралям 24 и 25 поступает в полости управления П2Р2 и П3Р3, что приводит к переключению гидрораспределителей Р2, Р3 в правое положение. В результате этого масло через гидрораспределитель Р2 по магистрали 22 поступает в штоковую полость 3 гидроцилиндра Ц, и его перемещающийся влево поршень вытесняет масло из поршневой полости 2 по магистралям 21 и 20 и далее через гидрораспределитель Р3, магистраль 18 и регулятор потока РП, магистраль 19, распределитель Р3 и магистрали 17 и 16 идет на слив через гидрораспределитель Р2. Скорость перемещения поршня гидроцилиндра Ц влево определяется настройкой регулятора потока РП, подключенного на «выход» из поршневой полости 2 гидроцилиндра Ц.
При включении электромагнита Э3 гидрораспределителя Р4 масло в поршневую полость 2 гидроцилиндра Ц поступает минуя регулятор потока РП, что увеличивает скорость перемещения поршня. При включении электромагнита Э2 и выключении Э1гидрораспределителя Р1 и электромагнита Э3 гидрораспределителя Р4 масло от гидрораспределителя Р1 по магистралям 24 и 25 поступает в полости управления П2Р2 и П3Р3, что приводит к переключению гидрораспределителей Р2, Р3 в правое положение. В результате этого масло через гидрораспределитель Р2 по магистрали 22 поступает в штоковую полость 3 гидроцилиндра Ц, и его перемещающийся влево поршень вытесняет масло из поршневой полости 2 по магистралям 21 и 20 и далее через гидрораспределитель Р3, магистраль 18 и регулятор потока РП, магистраль 19, распределитель Р3 и магистрали 17 и 16 идет на слив через гидрораспределитель Р2. Скорость перемещения поршня гидроцилиндра Ц влево определяется настройкой регулятора потока РП, подключенного на «выход» из поршневой полости 2 гидроцилиндра Ц. При включении электромагнита Э3 гидрораспределителя Р4 и включенном электромагните Э2 гидрораспределителя Р1 масло из поршневой полости 2 гидроцилиндра Ц сли-вается минуя регулятор потока РП, что увеличивает скорость перемещения поршня. Включение одного и того же регулятора потока РП на «вход» и на «выход» поршневой полости 2 гидроцилиндра Ц, подключенного по дифференциальной схеме, обеспечивает одинаковую, минимально возможную скорость перемещения поршня в обоих направлениях и максимально возможный диапазон регулирования скоростей.
При включении электромагнита Э3 гидрораспределителя Р4 и включенном электромагните Э2 гидрораспределителя Р1 масло из поршневой полости 2 гидроцилиндра Ц сли-вается минуя регулятор потока РП, что увеличивает скорость перемещения поршня. Включение одного и того же регулятора потока РП на «вход» и на «выход» поршневой полости 2 гидроцилиндра Ц, подключенного по дифференциальной схеме, обеспечивает одинаковую, минимально возможную скорость перемещения поршня в обоих направлениях и максимально возможный диапазон регулирования скоростей.
Рис. 5. Система управления гидроцилиндром перемещающимся вперед с двумя
различными скоростями
На Рис 5 показана гидросхема управления гидроцилиндром, позволяющая реализовать цикл его работы, состоящий из ускоренного и замедленного перемещения штока в одну сторону и быстрого возврата в исходное положение. Эта гидросхема содержит следующие функциональные элементы, гидропанель ГП типа 2ПГ36-14, в которую входит регулятор потока РП с обратным клапаном КО2, дроссель Д и трехнозиционный гидрораспределитель с механическим управлением Г3, а также гидроблок ГБ, состоящий из гидрораспределителей Р1 и Р2 с электромагнитным управлением, трех гидроуправляемых клапанов КГ1 – КГ3, обратного клапана КО и гидроклапана давления ГД.
Работает гидропривод следующим образом. При одновременном включении электормагнитов Э1 и Э3 реализуется режим ускоренного перемещения поршня гидроцилиндра Ц, при котором полости управления гидроклапанов КГ2 и ГД соединены со сливом, а поток масла из линии нагнетания Р через магистраль 1 и далее при закрытых клапанах КГ1 и КГ3 через клапан КГ2, магистраль 6, регулятор потока РП и гилрораспределитель ГЗ гидропанели ГП, магистраль 7 и 8 поступает в поршневую полость гидроцилиндра Ц, а из его штоковой полости по магистрали 9, через клапаны ГД, КО1 и по магистрали 8, масло также поступает в поршневую полость гидроцилиндра (гидроцилиндр работает по дифференциальной схеме). При этом поршень гидроцилиндра Ц вместе со штоком перемещается вправо и своим кулачком К воздействует на гидрораспределитель Г3 гидропанели ГП, переключая его в среднее положение, в результате чего поток масла, поступающего в поршневую полость гидроцилиндра Ц плавно перекрывается, а клапан КО1 с усиленной пружиной обеспечивает плавное торможение исполнительного органа в конце которого магистраль 13 соединяется со сливом, клапан КО1 запирается и гидроцилиндр Ц а масло из его штоковой полости через гидроклапан ГД и гидрораспределитель ГЗ идет на слив, в результате чего скорость перемещения штока гидроцилиндра Ц снижается. При дальнейшем движении штока гидроцилиндра Ц второй выступ его кулачка К переключает гидрораспределитель Г3 в третье положение, при котором масло в поршневую полость гидроцилиндра Ц из напорной магистрали Р поступает через регулятор потока РП и дроссель Д гидропанели ГП и далее по магистралям 17, 7 и 8, а слив масла из штоковой полости гидроцилиндра происходит по магистралям 9, 14 через гидроклапан ГД, магистраль 13 и гидрораспределитель ГЗ, что приводит к еще большему снижению скорости перемещения штока. Для возврата штока в исходное положения включается электромагнит Э2 гидрораспределителя Р1 и выключаются электромагниты Э1 и Э3, при этом клапан ГД и КГ2 запираются и поток масла из напорной линии Р по магистрали 1 через клапан КГ1 и магистраль 9 поступает в штоковую полость гидроцилиндра Ц, а масло из его поршневой полости, вытесняемое перемещающимся влево поршнем через магистраль 8 и 7, обратный клапан КО2 гидропанели ГП, магистрали 6, 11, клапан КГ3 и магистраль 12 идет на слив, чем обеспечивается быстрое перемещение влево штока гидроцилиндра.
При дальнейшем движении штока гидроцилиндра Ц второй выступ его кулачка К переключает гидрораспределитель Г3 в третье положение, при котором масло в поршневую полость гидроцилиндра Ц из напорной магистрали Р поступает через регулятор потока РП и дроссель Д гидропанели ГП и далее по магистралям 17, 7 и 8, а слив масла из штоковой полости гидроцилиндра происходит по магистралям 9, 14 через гидроклапан ГД, магистраль 13 и гидрораспределитель ГЗ, что приводит к еще большему снижению скорости перемещения штока. Для возврата штока в исходное положения включается электромагнит Э2 гидрораспределителя Р1 и выключаются электромагниты Э1 и Э3, при этом клапан ГД и КГ2 запираются и поток масла из напорной линии Р по магистрали 1 через клапан КГ1 и магистраль 9 поступает в штоковую полость гидроцилиндра Ц, а масло из его поршневой полости, вытесняемое перемещающимся влево поршнем через магистраль 8 и 7, обратный клапан КО2 гидропанели ГП, магистрали 6, 11, клапан КГ3 и магистраль 12 идет на слив, чем обеспечивается быстрое перемещение влево штока гидроцилиндра. В исходном положении электромагниты Э1 – Э3 выключены и шток гидроцилиндра
В исходном положении электромагниты Э1 – Э3 выключены и шток гидроцилиндра
удерживается клапанами КГ1, КГ2 и КГ3, запертыми давлением масла, поступающего от гидрораспределителя Р1 находящегося в нейтральном положении.
Рис. 6. Схема объемного регулирования скорости гидроцилиндра
Основным недостатком дроссельного регулирования используемого для изменения потока масла подаваемого а рабочие полости гидроцилиндра, рассмотренных ранее, является то, что при значительном снижении скорости перемещении исполнительного органа уменьшается поток масла поступающий в гидродвигатель, а основной поток масла от насоса сливается с номинальным давлением через предохранительный клапан, в результате этого, происходит нагрев масла в системе выше допустимой температуры. Этот недостаток исключается при объемном регулировании расхода масла подаваемого в рабочие полости гидродвигателя, что достигается за счет применения нескольких насосов с различной производительностью или насоса с регулируемой производительностью.
На Рис 6 показана гидросхема объемного регулирования скорости перемещения штока гидроцилиндра за счет использования двух насосов с различной производительностью и давлением. Она состоит из двухпоточного насоса Н1 (низкого давления) и Н2 (высокого давления), двух предохранительных клапанов КП1 и КП2, настроенных на низкое и высокое давление, двухпозиционного гидрораспределителя Р1, реле давления РД1, обратного клапана КО1 и гидроцилиндра Ц1.
Работает гидропривод следующим образом. Для ускоренного перемещения штока гидроцилиндра Ц1 включаются электромагниты Э1, Э2, Э3, при этом предохранительные клапаны КП1 и КП2 закрываются и поток масла от обоих насосов Н1 и Н2 по напорной магистрали 1 через гидрораспределитель Р1, переключенный в левое положение, подается в поршневую полость гидроцилндра, Ц1, а из его штоковой полости через гидрораспределитель Р1 и сливную магистраль 2 сливается в бак. По мере перемещения штока гидроцилиндра Ц1, увеличивается действующая на него внешняя нагрузка и соответственно давление в поршневой полости гидроцилиндра, что приводит к срабатыванию реле давления РД1, которое дает команду на выключение Э1 и масло от насоса Н1 идет на слив, при этом обратный клапан КО1 отсекает магистраль высокого давления от слива через клапан КП1. Это приводит к тому, что расход масла поступающего в поршневую полость гидроцилиндра Ц1 уменьшается а давление растет, обеспечивая необходимый режим его работы. В конце хода штока гидроцилиндра Ц1 срабатывает конечный выключатель ВК, который через систему электроавтоматики дает команду на возврат его штока в исходное положение. В результате этого выключается электромагнит Э3 и включается электромагнит Э1, что приводит к переключению гидрораспределителя Р1 в правое положение, запиранию предохранительного клапана КП1 и увеличению расхода масла поступающего в штоковую полость гидроцилиндра Ц1, обеспечивающему быстрый возврат штока гидроцилиндра Ц в исходное положение.
Это приводит к тому, что расход масла поступающего в поршневую полость гидроцилиндра Ц1 уменьшается а давление растет, обеспечивая необходимый режим его работы. В конце хода штока гидроцилиндра Ц1 срабатывает конечный выключатель ВК, который через систему электроавтоматики дает команду на возврат его штока в исходное положение. В результате этого выключается электромагнит Э3 и включается электромагнит Э1, что приводит к переключению гидрораспределителя Р1 в правое положение, запиранию предохранительного клапана КП1 и увеличению расхода масла поступающего в штоковую полость гидроцилиндра Ц1, обеспечивающему быстрый возврат штока гидроцилиндра Ц в исходное положение.
Рис. 7. Схема управления гидроцилиндром с ускоренным холостым ходом
В оборудовании, имеющем вертикальную компоновку основного рабочего гидроцилиндра с большим ходом, значительная часть которого должна выполняться с высокой скоростью при невысоком давлении, такой режим работы обеспечивается гидроприводом с дополнительным баком который расположен над гидроцилиндром и соединяется с ним через обратный клапан (см Рис 7).
Этот гидропривод содержит два насоса Н1 и Н2 низкого и высокого давления (насос низкого давления имеет большую производительность), предохранительные клапаны КП1 и КП2 с электрогидравлическим управлением и КП3 с гидроуправлением, гидро-управляемые клапаны К1 – К5, деле давления РД1 и РД2 и два гидрораспределителя Р1 и Р2. При этом рабочий гидроцилиндр имеет три полости форсирующую А, поршне-вую В и штоковую С.
Работает гидропривод следующим образом. При включении электромагнитов Э1, Э2, Э4 предохранительные клапаны КП1 и КП2 закрываются и масло от обоих насосов Н1 и Н2 по магистрали 2 поступает к подводу в гидрораспределитель Р1 и по магистралям 2, 3 на вход клапана К3. При этом масло от гидрораспределителя Р1, переключившегося в правое положение по магистралям 9 и 8 поступает в линию управления клапанов К2 и К3, а масло из линий управления клапанами К4 и К5 идет на слив, а масло из магистрали 3 через клапан К3 по магистрали 4 через клапан К5, по магистралям 17, 13, 12 поступает в форсирующую полость А гидроцилиндра Ц, что приводит к ускоренному опусканию вниз его штока. Снижение давления масла в поршневой полости В гидроцилиндра Ц приводит к открыванию обратного клапана КО и поступлению масла из бака Б в поршневую полость В гидроцилиндра. По мере увеличения внешней нагрузки действующей на шток гидроцилиндра Ц возрастает давление в форсирующей полости А и магистрали 12, что приводит к срабатыванию реле давления РД1, которое через систему электроавтоматики дает команду на включение электромагнита Э5 гидрораспределителя Р2, управляющего клапаном К1. При этом линия управления клапаном К1 соединяется со сливом и масло от обоих насосов Н1 и Н2 из магистрали 17 и 14 через клапан К1 по магистрали 16 поступает в поршневую полость В гидроцилиндра Ц, создавая в ней увеличенное давления, которое позволяет создать на штоке гидроцилиндра большее усилие, но при более низкой скорости его перемещения (при этом обратный клапан КО закрывается, отсекая подачу масла из бака). В конце хода штока внешняя нагрузка достигает максимальной величины и срабатывает реле давления РД2, соединенное с поршневой полостью В гидроцилиндра посредствам магистрали 16 и через систему электроавтоматики дает команду на выключение электромагнита Э1, и поток масла от насоса низкого давления Н1 идет на слив, а насос высокого давления Н2 поднимает рабочее давление в напорной магистрали 2 до величины настройки предохранительного клапана КП2, при этом обратный клапан КО1 закрывается и не позволяет потоку масла высокого давления сливаться через предо-хранительный клапан КП1.
Снижение давления масла в поршневой полости В гидроцилиндра Ц приводит к открыванию обратного клапана КО и поступлению масла из бака Б в поршневую полость В гидроцилиндра. По мере увеличения внешней нагрузки действующей на шток гидроцилиндра Ц возрастает давление в форсирующей полости А и магистрали 12, что приводит к срабатыванию реле давления РД1, которое через систему электроавтоматики дает команду на включение электромагнита Э5 гидрораспределителя Р2, управляющего клапаном К1. При этом линия управления клапаном К1 соединяется со сливом и масло от обоих насосов Н1 и Н2 из магистрали 17 и 14 через клапан К1 по магистрали 16 поступает в поршневую полость В гидроцилиндра Ц, создавая в ней увеличенное давления, которое позволяет создать на штоке гидроцилиндра большее усилие, но при более низкой скорости его перемещения (при этом обратный клапан КО закрывается, отсекая подачу масла из бака). В конце хода штока внешняя нагрузка достигает максимальной величины и срабатывает реле давления РД2, соединенное с поршневой полостью В гидроцилиндра посредствам магистрали 16 и через систему электроавтоматики дает команду на выключение электромагнита Э1, и поток масла от насоса низкого давления Н1 идет на слив, а насос высокого давления Н2 поднимает рабочее давление в напорной магистрали 2 до величины настройки предохранительного клапана КП2, при этом обратный клапан КО1 закрывается и не позволяет потоку масла высокого давления сливаться через предо-хранительный клапан КП1. При завершении рабочего хода штока гидроцилиндра Ц конечным выключателем подается команда на его возврат в исходное положение. Для этого включается электромагнит Э1 и Э3, а электромагниты Э2 и Э5 остаются включенными, что приводит к поступлению масла от гидрораспределителя Р1, переключившегося в ле-вое положение, в линии управления клапанов К4 и К5, а из линий управления клапанов К2 и К3 идет на слив, что обеспечивает подвод масла от магистрали 3 через клапан К3 по магистрали 19,18, через предохранительный клапан КП3, и магистраль 21 в штоковую полость С гидроцилиндра Ц. При этом масло из поршневой полости В по магистрали 16 и из форсирующей полости А по магистрали 12, через клапан К1 и клапан К2 идет на слив, что приводит к подъему штока и возврату его в исходное верхнее положение, после чего все электромагниты выключаются. В верхнем исходном положении шток гидроцилиндра удерживается предохранительным клапаном КП3, который настроен на необходимое для этого давление, пропорциональное весу штока гидроцилиндра.
При завершении рабочего хода штока гидроцилиндра Ц конечным выключателем подается команда на его возврат в исходное положение. Для этого включается электромагнит Э1 и Э3, а электромагниты Э2 и Э5 остаются включенными, что приводит к поступлению масла от гидрораспределителя Р1, переключившегося в ле-вое положение, в линии управления клапанов К4 и К5, а из линий управления клапанов К2 и К3 идет на слив, что обеспечивает подвод масла от магистрали 3 через клапан К3 по магистрали 19,18, через предохранительный клапан КП3, и магистраль 21 в штоковую полость С гидроцилиндра Ц. При этом масло из поршневой полости В по магистрали 16 и из форсирующей полости А по магистрали 12, через клапан К1 и клапан К2 идет на слив, что приводит к подъему штока и возврату его в исходное верхнее положение, после чего все электромагниты выключаются. В верхнем исходном положении шток гидроцилиндра удерживается предохранительным клапаном КП3, который настроен на необходимое для этого давление, пропорциональное весу штока гидроцилиндра.
Все рассмотренные схемные решения, позволяющие регулировать скорость перемещения выходного звена гидродвигателя не могут обеспечить оптимальные затраты мощности гидропривода в течении цикла его работы поскольку не может быть выполнено со-отношение pQ = const. График этой зависимости показан на Рис 8.
Рис. 8. График зависимости pQ = const
Такая зависимость между давлением р и расходом Q насоса позволяет получить гидропривод с максимальным КПД. В качестве насосов с регулируемой производительностью, чаще всего, применяются радиально и аксиально – поршневые насосы, которые помимо наличия регулируемой производительности, позволяют устанавливать на их валу дополнительные насосы более низкого давления, но с достаточно большой производительностью, что дает возможность создавать на базе этих насосов сложные многопоточные гидроагрегаты с большим диапазоном производительности и давления. Cуществует три схемы регулирования производительности насоса в зависимости от величины давления в напорной магистрали, с помощью одной пружины, с помощью двух пружин и с помощью копирного механизма.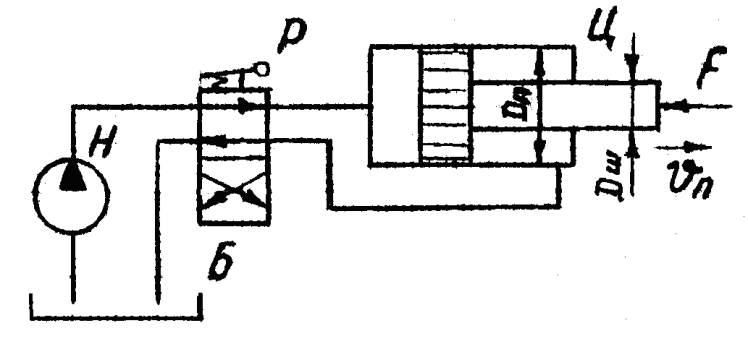 Рассмотрим схему регулирования производительности радиально-поршневого насоса с помощью одной пружины, показанную на Рис 9.
Рассмотрим схему регулирования производительности радиально-поршневого насоса с помощью одной пружины, показанную на Рис 9.
Рис. 9. Схема регулирования производительности насоса
Она содержит пружину 1, вспомогательный гидроцилиндр 2, регулировочный винт 3, барабан насоса 4, корпус насоса 5. Пружина 1 в исходном положении постоянно прижимает барабан 4 к регулировочному винту 3, и при таком его положении насос развивает максимальную производительность при минимальном давлении. Плунжер гидроцилиндра 2 постоянно соединен с напорной магистралью, при этом усилие развиваемое гидроцилиндром и зависящее от давления в напорной магистрали в начальный момент меньше усилия пружины 1. Поэтому, возрастание давления в напорной магистрали приводит к тому, что гидроцилиндр 2 преодолевает усилие пружины 1 и смещает барабан насоса 4 вправо, уменьшая тем самым эксцентриситет е (см Рим 9) и производительность насоса снижается а давление растет в соответствии с соотношением pQ = const .
Рис. 10. Схема насосной установки с регулируемой производительностью типа Г 44- 48
Примером гидропривода с регулируемой производительностью является насосная установка Г48-44, гидросхема которой показана на Рис 10. Она содержит регулируемый аксиально-поршневой насос Н1, насос подпитки Н2, пружинный аккумулятор А, снабженный распределителем запуска РЗ с золотником П и дросселирующим золотником ДЗ, управляющий золотник УЗ, реле давления РД1 и РД2, предохрани-тельный клапан КП и подпорный клапан ПК, а также электродвигатель М1 привода насоса Н1 и электродвигатель М2 привода насоса Н2, фильтр тонкой очистки Ф, воздушный маслоохладитель МО и температурные реле ТР1 и ТР2. Производительность аксиально – поршневого насоса Н1 регулируется изменением угла α наклона шайба, которое осуществляется гидроцилиндрами Ц1 и Ц2 встроенными в насос Н1, при этом положение их штоков зависит от давления масла подаваемого в поршневые полости по магистралям 3 и 8
Работает насосная установка следующим образом. При включении электродвигателя М2 масло от насоса Н2 через фильтр Ф магистрали 2 и 4, клапан КП по каналу 6 поступает во всасывающую линию насоса Н1 и далее по магистрали 13 через подпорный клапан ПК, маслоохладитель МО и магистраль 15 сливается в бак, кроме того масло поступает по каналу 4 в гидроцилиндр Ц1. Когда давление во всасывающей линии достигнет величины настройки клапана ПК, реле давления РД1 дает команду на включение электродвигателя насоса Н1. В этот момент распределитель запуска РЗ и золотник П пружинами установленные в крайнее верхнее положение (см. Рис. 10) и камеры насоса Н1 объединены между собой (11-16-22-РЗ-14-12), благодаря чему обеспечивается его плавный запуск. При возрастании давления в напорной линии 11 масло через дроссель 19 поступает к управляющему поршню распределителя РЗ. А так как полость под его поршнем постоянно соединена со всасывающей линией через каналы 21 и 14, поршень устанавливает распределитель РЗ в среднее положение, при котором линии насоса Н1 соединяются через дроссель.
При включении электродвигателя М2 масло от насоса Н2 через фильтр Ф магистрали 2 и 4, клапан КП по каналу 6 поступает во всасывающую линию насоса Н1 и далее по магистрали 13 через подпорный клапан ПК, маслоохладитель МО и магистраль 15 сливается в бак, кроме того масло поступает по каналу 4 в гидроцилиндр Ц1. Когда давление во всасывающей линии достигнет величины настройки клапана ПК, реле давления РД1 дает команду на включение электродвигателя насоса Н1. В этот момент распределитель запуска РЗ и золотник П пружинами установленные в крайнее верхнее положение (см. Рис. 10) и камеры насоса Н1 объединены между собой (11-16-22-РЗ-14-12), благодаря чему обеспечивается его плавный запуск. При возрастании давления в напорной линии 11 масло через дроссель 19 поступает к управляющему поршню распределителя РЗ. А так как полость под его поршнем постоянно соединена со всасывающей линией через каналы 21 и 14, поршень устанавливает распределитель РЗ в среднее положение, при котором линии насоса Н1 соединяются через дроссель. В это время масло поступает в гидроцилиндр Ц2 от управляющего золотника УЗ, который представляет собой двух-кромочный золотниковый усилитель с одной стороны нагруженный регулируемым усилием пружины и давлением во всасывающей линии (12 – 6 – 7), а с другой давлением в напорной линии (11 – 9 – 10). Если давление в напорной линии ниже давления на-стройки, поршневая камера гидроцилиндра Ц2 соединяется со всасывающей линией (12 – 6 – 5 – УЗ – 8 – Ц2), и пружины прижимают наклонную шайбу к упору, ограни-чивающему ее максимальный угол наклона. По мере роста давления в напорной линии плунжер УЗ смещается влево, сжимая пружину, при этом давление в поршневой камере гидроцилиндра Ц2 увеличивается и угол соответственно уменьшается. Наконец при максимальном давлении линии 8 и 9 соединяются через УЗ и цилиндр Ц2 ставит шайбу насоса Н1 в положение близкое к нулевому, при котором подача насоса используется только для компенсации утечек в гидроприводе. Аккумулятор А подключенный через дросселирующий золотник ДЗ служит для уменьшения пульсации давления в гидроприводе и исключения пиков давления в переходных процессах работы насоса Н2.
В это время масло поступает в гидроцилиндр Ц2 от управляющего золотника УЗ, который представляет собой двух-кромочный золотниковый усилитель с одной стороны нагруженный регулируемым усилием пружины и давлением во всасывающей линии (12 – 6 – 7), а с другой давлением в напорной линии (11 – 9 – 10). Если давление в напорной линии ниже давления на-стройки, поршневая камера гидроцилиндра Ц2 соединяется со всасывающей линией (12 – 6 – 5 – УЗ – 8 – Ц2), и пружины прижимают наклонную шайбу к упору, ограни-чивающему ее максимальный угол наклона. По мере роста давления в напорной линии плунжер УЗ смещается влево, сжимая пружину, при этом давление в поршневой камере гидроцилиндра Ц2 увеличивается и угол соответственно уменьшается. Наконец при максимальном давлении линии 8 и 9 соединяются через УЗ и цилиндр Ц2 ставит шайбу насоса Н1 в положение близкое к нулевому, при котором подача насоса используется только для компенсации утечек в гидроприводе. Аккумулятор А подключенный через дросселирующий золотник ДЗ служит для уменьшения пульсации давления в гидроприводе и исключения пиков давления в переходных процессах работы насоса Н2.
В ряде случаев помимо регулирования скорости перемещения выходного звена приводимого механизма его гидравлический привод должен периодически обеспечивать определенную паузу в процессе перемещения, например при сверлении глубоких отверстий, в процессе которого технологическим процессом определена периодическая остановка подачи инструмента.
Рис. 11 Схема управления гидроприводом сверлильной головкой совершающей при перемещении периодические остановки.
На Рис. 11 показана схема управления гидроприводом сверлильной головкой совершающей при перемещении периодические остановки. Этот гидропривод включает исполнительный гидроцилиндр Ц, обеспечивающий возвратно – поступательное перемещение приводимой им сверлильной головки, гидрораспределители Р1 – Р3, работой которых управляют электромагниты Э1 – Э5, а также подпорный клапан КП, регулятор потока РП и дозатор Д, соединенные между собою соответствующими магистралями.
Работает гидропривод следующим образом. В исходном положении, контролируемым конечным выключателем ВК1, все электромагниты гадрораспределителей выключены. Цикл работы гидропривода начинается с включения электромагнита Э1, что приводит к его переключению в правое положение гидрораспределителя Р1. В результате этого масло из напорной магистрали через гидрораспределитель Р1 поступает в поршневую полость гидроцилиндра Ц, а из его штоковой полости идет на слив и шток гидроцилиндра перемещается влево с увеличенной скоростью. После срабатывания конечного выключателя ВК2 происходит выключение электромагнита Э1 и включение электромагнита Э3, что приводит к возврату гидрораспределителя Р1 в нейтральную позицию и переключению гидрораспределителя Р2 в правую позицию. В результате этого масло из напорной магистрали поступает в поршневую полость гидроцилиндра Ц через гидрораспределитель Р2 и регулятор потока РП, а масло из его штоковой полости идет на слив через подпорный клапан КП, что обеспечивает перемещение штока гидроцилиндра Ц с рабочей скоростью, при которой сверлильная головка выполняет сверление отверстия.
В исходном положении, контролируемым конечным выключателем ВК1, все электромагниты гадрораспределителей выключены. Цикл работы гидропривода начинается с включения электромагнита Э1, что приводит к его переключению в правое положение гидрораспределителя Р1. В результате этого масло из напорной магистрали через гидрораспределитель Р1 поступает в поршневую полость гидроцилиндра Ц, а из его штоковой полости идет на слив и шток гидроцилиндра перемещается влево с увеличенной скоростью. После срабатывания конечного выключателя ВК2 происходит выключение электромагнита Э1 и включение электромагнита Э3, что приводит к возврату гидрораспределителя Р1 в нейтральную позицию и переключению гидрораспределителя Р2 в правую позицию. В результате этого масло из напорной магистрали поступает в поршневую полость гидроцилиндра Ц через гидрораспределитель Р2 и регулятор потока РП, а масло из его штоковой полости идет на слив через подпорный клапан КП, что обеспечивает перемещение штока гидроцилиндра Ц с рабочей скоростью, при которой сверлильная головка выполняет сверление отверстия. Через определенные промежутки времени от программируемого контроллера, управляющего работой гидропривода, поступает команда на периодическое включение электромагнитов Э4 и Э5 гидрораспределителя Р3, что приводит к его периодическому переключению из левой позиции в правую и наоборот. При переключении гидрораспределителя Р3 в левое положение (как показано на Рис.11) масло от регулятора потока РП поступает в левую рабочую полость дозатора Д и его поршень не испытывая сопротивления перемещается вправо, а шток гидроцилиндра Ц вместе со сверлильной головкой на этот промежуток времени останавливается. После переключения гидрораспределителя Р3 в правое положение, которое происходит через заданный контроллером промежуток времени, масло от регулятора потока РП поступает в правую полость дозатора Д и его поршень не испытывая сопротивления перемещается влево, обеспечивая остановку штока гидроцилиндра Ц вместе со сверлильной головкой. Для продолжения движения штока гидроцилиндра Ц влево с рабочей скоростью снова включается электромагнты Э1 и Э3 гидрораспредедителей Р1 и Р2, а электромагниты Э4 и Э5 гидрораспределителя Р3 выключаются.
Через определенные промежутки времени от программируемого контроллера, управляющего работой гидропривода, поступает команда на периодическое включение электромагнитов Э4 и Э5 гидрораспределителя Р3, что приводит к его периодическому переключению из левой позиции в правую и наоборот. При переключении гидрораспределителя Р3 в левое положение (как показано на Рис.11) масло от регулятора потока РП поступает в левую рабочую полость дозатора Д и его поршень не испытывая сопротивления перемещается вправо, а шток гидроцилиндра Ц вместе со сверлильной головкой на этот промежуток времени останавливается. После переключения гидрораспределителя Р3 в правое положение, которое происходит через заданный контроллером промежуток времени, масло от регулятора потока РП поступает в правую полость дозатора Д и его поршень не испытывая сопротивления перемещается влево, обеспечивая остановку штока гидроцилиндра Ц вместе со сверлильной головкой. Для продолжения движения штока гидроцилиндра Ц влево с рабочей скоростью снова включается электромагнты Э1 и Э3 гидрораспредедителей Р1 и Р2, а электромагниты Э4 и Э5 гидрораспределителя Р3 выключаются.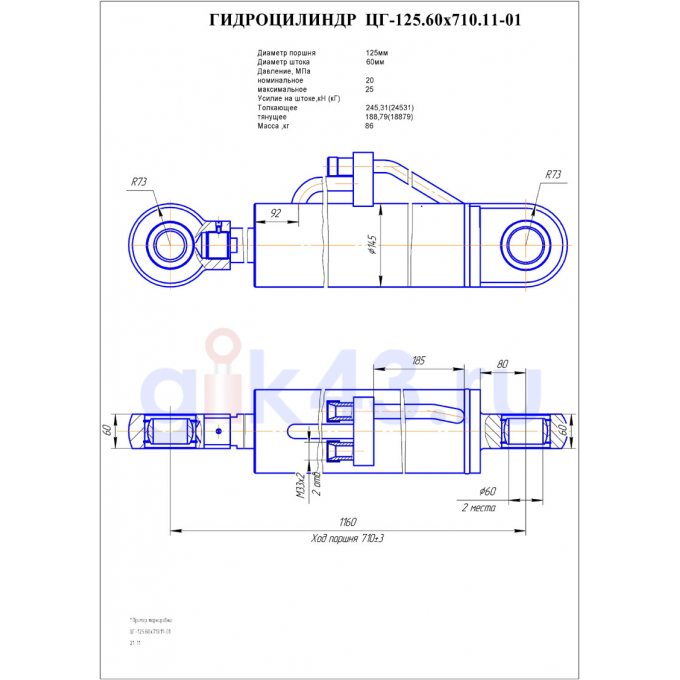 Таким образом, обеспечивается движение штока гидроцилиндра Ц вместе со сверлильной головки с периодическими остановками, продолжительность которых определяется объемом дозатора Д. После срабатывания конечного выключателя ВК3, свидетельствующего о перемещении штока гидроцилиндра Ц вместе со сверлильной головки в крайнее левое положение, включается электромагнит Э2 и выключается электромагнит Э3, что приводит к тому что масло из напорной магистрали через гидрораспределитель Р1 поступает в штоковую полость гидроцилиндра Ц, а из его поршневой полости идет на слив. При возвращении штока гидроцилиндра Ц в крайнее правое положение срабатывает конечный выключатель ВК1, который возвращает все элементы гидропривода в исходное положение
Таким образом, обеспечивается движение штока гидроцилиндра Ц вместе со сверлильной головки с периодическими остановками, продолжительность которых определяется объемом дозатора Д. После срабатывания конечного выключателя ВК3, свидетельствующего о перемещении штока гидроцилиндра Ц вместе со сверлильной головки в крайнее левое положение, включается электромагнит Э2 и выключается электромагнит Э3, что приводит к тому что масло из напорной магистрали через гидрораспределитель Р1 поступает в штоковую полость гидроцилиндра Ц, а из его поршневой полости идет на слив. При возвращении штока гидроцилиндра Ц в крайнее правое положение срабатывает конечный выключатель ВК1, который возвращает все элементы гидропривода в исходное положение
Рис. 12 Схема управления гидроприводом, обеспечивающая колебательное движение штока гидроцилиндра, выполняемое в автоматическом режиме.
На Рис. 12 показана схема управления гидроприводом, обеспечивающая колебательное движение штока гидроцилиндра, выполняемое в автоматическом режиме. Она содержит гидрораспределители Р1, Р2 с электромагнитным управлением , гидрораспределитель Р3 с гидравлическим управлением, гидрораспределители Р4, Р5 с механическим управлением, обратный клапан КО, подпорный клапан КП и гидрозамок ГЗ а также исполнительный гидроцилиндр Ц1 и гидроцилиндр управления Ц2.
Она содержит гидрораспределители Р1, Р2 с электромагнитным управлением , гидрораспределитель Р3 с гидравлическим управлением, гидрораспределители Р4, Р5 с механическим управлением, обратный клапан КО, подпорный клапан КП и гидрозамок ГЗ а также исполнительный гидроцилиндр Ц1 и гидроцилиндр управления Ц2.
Работает гидропривод следующим образом. В исходном положении шток гидроци-индра Ц1 втянут, а шток гидроцилиндра Ц2 выдвинут, гидрораспределители Р1 и Р2 находятся в нейтральном положении, гидрораспределитель Р3 в левом положении, гидрораспределители Р4 и Р5 в левом положении, а гидрозамок ГЗ закрыт. При этом поршневая полость гидроцилиндра Ц1 соединена с штоковой полостью гидроцилиндра управления Ц2, а поршневая полость гидроцилиндра управления Ц2 соединена со сливом. Для введения штока гидроцилиндра Ц1 в рабочую зону технологического оборудования включается электромагниты Э1 и Э3. При этом масло из напорной магистрали через гидрораспределитель Р1 находящийся в левом положении и гидрораспределитель Р2 находящийся в правом положении, а также через обратный клапан КО поступает в поршневую полость гидроцилиндра Ц1, а из его штоковой полости идет на слив, что приводит к выдвижению штока гидроцилиндра Ц1, в это же время масло поступает в штоковую полость гидроцилиндра управления Ц2, что приводит к опусканию его штока. В конце хода кулачок на штоке гидроцилиндра управления Ц2 переключает гидрораспределитель Р4 в правое положение, а пружина гидрораспределителя Р5, освободившегося от воздействия кулачка на штоке гидроцилиндра управления Ц2, возвращает его в правое положение. В результате этого на подвод управления П1 гидрораспределителя Р3 поступает масло от гидрораспределителя Р4, а масло из подвода управления П2 гидрораспределителя Р3 идет на слив через гидрораспределитель Р5, что приводит к переключению гидрораспределителя Р3 в левое положение (см. Рис. 12). После этого шток гидроцилиндра Ц1 начинает совершать колебательное движение, которое происходит в результате того, что выключаются электромагниты Э1 и Э3 гидрораспредедителей Р1 и Р3 и включается электромагнит Э2 гидрораспередедителя Р1, что приводит к его переключению в правое по-ложение и переключению гидрораспределителя Р2 в нейтральное положение. При этом, масло из напорной магистрали через гидрораспределитель Р1 и гидрораспределитель Р3 поступает в поршневую полость гидроцилиндра управления Ц2, а из его штоковой полости масло поступает в поршневую полость гидроцилиндра Ц1.
В конце хода кулачок на штоке гидроцилиндра управления Ц2 переключает гидрораспределитель Р4 в правое положение, а пружина гидрораспределителя Р5, освободившегося от воздействия кулачка на штоке гидроцилиндра управления Ц2, возвращает его в правое положение. В результате этого на подвод управления П1 гидрораспределителя Р3 поступает масло от гидрораспределителя Р4, а масло из подвода управления П2 гидрораспределителя Р3 идет на слив через гидрораспределитель Р5, что приводит к переключению гидрораспределителя Р3 в левое положение (см. Рис. 12). После этого шток гидроцилиндра Ц1 начинает совершать колебательное движение, которое происходит в результате того, что выключаются электромагниты Э1 и Э3 гидрораспредедителей Р1 и Р3 и включается электромагнит Э2 гидрораспередедителя Р1, что приводит к его переключению в правое по-ложение и переключению гидрораспределителя Р2 в нейтральное положение. При этом, масло из напорной магистрали через гидрораспределитель Р1 и гидрораспределитель Р3 поступает в поршневую полость гидроцилиндра управления Ц2, а из его штоковой полости масло поступает в поршневую полость гидроцилиндра Ц1. В это же время масло от гидрораспределителя Р1 поступает в полость управления У гидрозамка ГЗ, открытие которого приводит к сливу масла из штоковой полости гидроцилиндра Ц1 через гидрозамок ГЗ и гидрораспределитель Р3, в результате чего шток гидроцилиндра Ц1 выдвигается на величину пропорциональную объему штоковой полости гидроцилиндра управления Ц2. При достижении штоком гидроцилиндра управления Ц2 верхнего положения его кулачок переключает гидрораспределитель Р5 в левое положение, а пружина гидрораспределителя Р4, освободившегося от воздействия кулачка на штоке гидроцидлиндра Ц2 возвращает его в левое положение, что приводит к поступлению масла на подвод управления П2 гидрораспределителя Р3 и сливу масла из его подвода управления П1, и как следствие переключению гидрораспределителя Р3 в правое положение. В результате этого масло от гидрораспеределителя Р1 находящегося при включенном электромагните Э2 в правом положении, через гидрораспределитель Р3 также находящийся в правом положении и открытый гидрозамок ГЗ поступает в штоковую полость гидроцилиндра Ц1 и заставляет при этом его шток втягиваться, что приводит к вытеснению масла из поршневой полости гидроцилиндра Ц1 в штоковую полость гидроцилиндра Ц2 и как следствие к опусканию его штока.
В это же время масло от гидрораспределителя Р1 поступает в полость управления У гидрозамка ГЗ, открытие которого приводит к сливу масла из штоковой полости гидроцилиндра Ц1 через гидрозамок ГЗ и гидрораспределитель Р3, в результате чего шток гидроцилиндра Ц1 выдвигается на величину пропорциональную объему штоковой полости гидроцилиндра управления Ц2. При достижении штоком гидроцилиндра управления Ц2 верхнего положения его кулачок переключает гидрораспределитель Р5 в левое положение, а пружина гидрораспределителя Р4, освободившегося от воздействия кулачка на штоке гидроцидлиндра Ц2 возвращает его в левое положение, что приводит к поступлению масла на подвод управления П2 гидрораспределителя Р3 и сливу масла из его подвода управления П1, и как следствие переключению гидрораспределителя Р3 в правое положение. В результате этого масло от гидрораспеределителя Р1 находящегося при включенном электромагните Э2 в правом положении, через гидрораспределитель Р3 также находящийся в правом положении и открытый гидрозамок ГЗ поступает в штоковую полость гидроцилиндра Ц1 и заставляет при этом его шток втягиваться, что приводит к вытеснению масла из поршневой полости гидроцилиндра Ц1 в штоковую полость гидроцилиндра Ц2 и как следствие к опусканию его штока. В этом случае величина перемещения штока гидроцилиндра Ц1 также пропорциональна объему штоковой полости гидроцилиндра управления Ц2. При возврате штока гидроцилиндра управления Ц2 в крайнее нижнее положение произойдет переключение гидрораспределителей Р4, Р5 и Р3, что послужит началом следующего колебательного цикла штока гидроцилиндра Ц1. После выполнения требуемого количества колебательных циклов шток гидроцилиндра Ц1 втягивается, для этого включается электромагнит Э1 гидрораспределителя Р1 и электромагнит Э4 гидрораспределителя Р2, в результате чего гидрораспределители Р1 и Р2 переключаются в левое положение, и масло из напорной магистрали через гидрораспределители Р1 и Р2 поступает в штоковую по-лость гидроцилиндра Ц1, а из его поршневой полости идет на слив через подпорный клапан КП, обеспечивающий плавность движения штока. В это время, поскольку гидрораспределитель Р1 находится в левом положении, масло к гидрораспределителю Р3 не поступает, что прекращает колебательное движение штока гидроцилиндра Ц1.
В этом случае величина перемещения штока гидроцилиндра Ц1 также пропорциональна объему штоковой полости гидроцилиндра управления Ц2. При возврате штока гидроцилиндра управления Ц2 в крайнее нижнее положение произойдет переключение гидрораспределителей Р4, Р5 и Р3, что послужит началом следующего колебательного цикла штока гидроцилиндра Ц1. После выполнения требуемого количества колебательных циклов шток гидроцилиндра Ц1 втягивается, для этого включается электромагнит Э1 гидрораспределителя Р1 и электромагнит Э4 гидрораспределителя Р2, в результате чего гидрораспределители Р1 и Р2 переключаются в левое положение, и масло из напорной магистрали через гидрораспределители Р1 и Р2 поступает в штоковую по-лость гидроцилиндра Ц1, а из его поршневой полости идет на слив через подпорный клапан КП, обеспечивающий плавность движения штока. В это время, поскольку гидрораспределитель Р1 находится в левом положении, масло к гидрораспределителю Р3 не поступает, что прекращает колебательное движение штока гидроцилиндра Ц1. На этом цикл работы гидропривода заканчивается.
На этом цикл работы гидропривода заканчивается.
При работе гидропривода может возникнуть необходимость обеспечить на штоке гидроцилиндра строго определенное усилие, или обеспечить перемещение штока гидроцилиндра только при определенном давлении масла в гидросистеме. Гидросистемы, позволяющие обеспечить такой режим работ гидроцилиндра, показаны на рис. 13.
Рис. 13. Схемы управления гидроцилиндром с использованием подпорного и редукционного клапанов
Если гидроцилиндр Ц2 должен начинать работать в определенное время цикла, только после достижения требуемого давления в напорной магистрали, то он соединяется с напорной магистралью через подпорный клапан КП, который обеспечивает проход масла в прямом направлении только при давлении, большем величины его настройки и свободно пропускающий масло в обратном направлении через обратный клапан КО (см. Рис 13а). Если усилие развиваемое штоком гидроцилиндра Ц не должно превышать определенной величины, его рабочая полость подключается к напорной магистрали через редукционный клапан КР, который настраивается на необходимое давлении (см. Рис 13б).
Рис 13б).
Большое количество процессов и технологических операций требуют в определенный непродолжительный момент времени резко увеличить усилие, при этом, как правило, скорость перемещения исполнительного органа существенно снижается, что затрудняет создание гидропривода с объемным регулированием скорости за счет изменения производительности насоса или насосов. В этом случае наиболее эффективными преобразователями давления являются мультипликаторы, которые позволяют в десятки раз увеличивать давление при небольшом расходе. Мультипликаторы широко применяются в гидравлическом кузнечнопрессовом оборудовании, зажимных приспособлениях для механической обработки, механизированной оснастке (гайковерты, ручные ножницы, ручной обжимной и гибочный инструмент), испытательном оборудование, подъемнотранспортном оборудование, устанавливаемом на шасси автомобиля. Основное преимущество мультипликаторов заключается в том, что они позволяют получить требуемое технологическое усилие достаточно простым способом без увеличения мощности гидроагрегата и не требуют для этого наличия распределительной аппаратуры и трубопроводов высокого давления, поскольку устанавливаются на гидроцилиндре или встраиваются в гидроцилиндр привода исполнительного механизма. 2 ) ;
2 ) ;
Рис. 14. Схемы гидравлических мультипликаторов
Рассмотрим работу мультипликатора схема которого показана на Рис 14а. Он состоит из ступенчатого гидроцилиндра состоящего из полости 1 высокого давления, в которой перемещается шток 4 и полости 2 низкого давления, в которой перемещается поршень 3. При этом поршень 3, выполненный с отверстием в центре, разделяет полость низкого давления 2 гидроцилиндра на две камеры 5 и 6, при этом, последняя соединена с атмосферой. В центральном отверстии штока 4 установлен обратный клапан 7, поджатый пружиной 8. Работает мультипликатор следующим образом. Масло под давлением P1 подается в камеру 5 полости низкого давления 2, что приводит к перемещению поршня 3 со штоком 4 вправо. При этом обратный клапан 7 открывается, и масло через отверстие в поршне 3 поступает в полость 1 высокого давления. При дальнейшем движении поршня 3 со штоком 4 вправо давление в полости 1 возрастает и обратный клапан 7 закрывается в результате чего давление в этой полости начинает расти и достигает величины равной P2 = Р1 (D_п^2)/(d_ш^2 ) ; Возврат поршня 3 со штоком 4 в исходное положение осуществляется пружиной 8 .
Для исключения холостого, возвратного хода поршня мультипликатора, который имеет место в преобразователях давления одинарного действия, схема работы которого была рассмотрена выше, и повышения его производительности, применяются мультипликаторы двойного действия, в которых высокое давление создается непрерывно (см. Рис 14б). Он представляет собой четырехкамерный гидроцилиндр 1 (две камеры низкого давления 7 и 8 и две камеры высокого давления 4 и 6) с поршнем 2, оснащенным двумя штоками 3 и 5. Полости гидроцилиндра соединяются через систему обратных клапанов К1 – К4, установленных в соответствующих магистралях, как показано на Рис 15.
Работает мультипликатор следующим образом. Масло от гидрораспределителя (на Рис 14б не показан) с низким давлением P_1 подается в камеру 7, а из камеры 8 в первый момент через обратный клапан К4 поступает в камеру 4 и магистраль высокого давления через обратный клапан К2, а затем когда за счет перемещения поршня 2 со штоком – плунжером 3 вправо давление в камере 4 возрастает и обратный клапан К4 закрывается, идет на слив. В это же время масло из камеры 7 поступает в камеру 6 через обратный клапан К3, при закрытом обратном клапане К1 за счет наличия повышенного давления в отводящей магистрали связанной через обратный клапан К2 с камерой высокого давления 4. Такое движение поршня 2 со штоком – плунжером 3 приводит к возрастанию давления масла в камере 4 до величины P2 которое подается в отводящую магистраль через обратный клапан К2. При совершении полного хода вправо поршнем 2 подается команда на его возврат в исходное положение. При этом масло с низким давлением от гидрораспределителя подается в камеру 8, а из камеры 7 идет на слив и высокое давление создается штоком – плунжером 5 аналогичным образом в камере 6. В это же время масло из камеры 8 через обратный клапан К4 поступает в камеру 4 при закрытом обратном клапане К2. Таким образом, из камер высокого давления 4 и 6 в отводящую магистраль постоянно подается масло с увеличенным давлением при прямом и обратном ходе поршня 2 поочередно.
В это же время масло из камеры 7 поступает в камеру 6 через обратный клапан К3, при закрытом обратном клапане К1 за счет наличия повышенного давления в отводящей магистрали связанной через обратный клапан К2 с камерой высокого давления 4. Такое движение поршня 2 со штоком – плунжером 3 приводит к возрастанию давления масла в камере 4 до величины P2 которое подается в отводящую магистраль через обратный клапан К2. При совершении полного хода вправо поршнем 2 подается команда на его возврат в исходное положение. При этом масло с низким давлением от гидрораспределителя подается в камеру 8, а из камеры 7 идет на слив и высокое давление создается штоком – плунжером 5 аналогичным образом в камере 6. В это же время масло из камеры 8 через обратный клапан К4 поступает в камеру 4 при закрытом обратном клапане К2. Таким образом, из камер высокого давления 4 и 6 в отводящую магистраль постоянно подается масло с увеличенным давлением при прямом и обратном ходе поршня 2 поочередно.
Рис. 15. Схема использования мультипликатора в составе гидропривода
15. Схема использования мультипликатора в составе гидропривода
На Рис 15 показана схема использования мультипликатора в составе гидропривода. Он содержит насос Н, пневмогидроаккумулятор А, мультипликатор М, гидроцилиндр Ц, предохранительный клапан КП и подпорный клапан ПК, два гидрораспределителя Р1 и Р2, три обратных клапана КО1 – КО3, гидрозамок ГЗ и три реле давления РД1 – РД3.
Работает гидропривод следующим образом. Подготовка к работе мультипликатора М заключается в зарядке аккумулятора А. Она осуществляется при включении электромагнитов Э1 и Э3, что обеспечивает подачу масла от насоса Н через гидрораспределитель Р1, находящийся в правом положении, и обратный клапан КО1 в аккумулятор А, при этом магистраль соединяющая его с полостью низкого давления мультипликатора М перекрыта гидрораспределителем Р2, находящийся в правом положении. При достижении в аккумуляторе А, давления масла, соответствующего настройке РД2, контролирующего его верхний предел, электромагнит Э1 выключается и гидропривод готов к работе. Для выполнения
Для выполнения
рабочего цикла гидропривода включается электромагнит Э2 (при включенном электромагните Э3) и масло от насоса Н через гидрораспределитель Р1, находящийся в левом положении, и гидрозамок ГЗ поступает в поршневую полость гидроцилиндра Ц, что приводит к перемещению его поршня со штоком вправо. Параллельно масло поступает через обратный клапан КО3 в камеру высокого давления мультипликатора М, дополнительно соединенную с поршневой полостью гидроцилиндра Ц посредствам обратного клапана КО2. При достижении давления масла в поршневой камере гидроцилиндра Ц соответствующего величине настройки реле давлении РД3, последнее через систему электроавтоматики выключает электромагнит Э3. При этом масло от аккумулятора А через гидрораспределитель Р2, находящийся в левом положении, поступает в полость низкого давления мультипликатора М, что приводит к перемещению его поршня вправо и сжатию масла штоком в камере высокого давления до величины необходимой для развития технологического усилия и подаче масла через обратный клапан КО2, в поршневую полость гидроцилиндра Ц. Далее для выполнения технологической операции шток цилиндра Ц должен находится в выдвинутом положении в течение определенной выдержки времени, при этом, для исключения утечек масла из его поршневой полости она соединена с гидрораспределителем Р1 через гадрозамок ГЗ. После окончания выдержки времени подается команда на возврат штока гидроцилиндра Ц в исходное положение. При этом включаются электромагниты Э1 и Э3 и масло от насоса Н через гидрораспределитель Р1 поступает в штоковую полость гидроцилиндра Ц, а параллельно этот же поток масла открывает гидрозамок ГЗ, что приводит к сливу масла из поршневой полости гидроцилиндра, при этом его шток возвращается в исходное положение, а масло из полости низкого давления мультиплика-тора М идет на слив через гидрораспределитель Р2, находящийся в правом положении. После этого электромагнит Э1 выключается и гидрораспределитель Р1 занимает ней-тральное положение и масло от насоса Н свободно идет на слив. В этот период цикла работы гидропривода давление в аккумуляторе А поддерживается обратным клапаном КО1.
Далее для выполнения технологической операции шток цилиндра Ц должен находится в выдвинутом положении в течение определенной выдержки времени, при этом, для исключения утечек масла из его поршневой полости она соединена с гидрораспределителем Р1 через гадрозамок ГЗ. После окончания выдержки времени подается команда на возврат штока гидроцилиндра Ц в исходное положение. При этом включаются электромагниты Э1 и Э3 и масло от насоса Н через гидрораспределитель Р1 поступает в штоковую полость гидроцилиндра Ц, а параллельно этот же поток масла открывает гидрозамок ГЗ, что приводит к сливу масла из поршневой полости гидроцилиндра, при этом его шток возвращается в исходное положение, а масло из полости низкого давления мультиплика-тора М идет на слив через гидрораспределитель Р2, находящийся в правом положении. После этого электромагнит Э1 выключается и гидрораспределитель Р1 занимает ней-тральное положение и масло от насоса Н свободно идет на слив. В этот период цикла работы гидропривода давление в аккумуляторе А поддерживается обратным клапаном КО1. При движении штока гидроцилиндра Ц в исходное положение слив масла из его поршневой полости происходит через подпорный клапан ПК, величина давления на ко-торое он настраивается не позволяет опорожняться камере высокого давления мультипли-катора. При падении давления в аккумуляторе А ниже величины настройки реле давления РД1, последнее включает для его подзарядки электромагнит Э1 гидрораспределителя Р1, который при этом переключается в правое положение.
При движении штока гидроцилиндра Ц в исходное положение слив масла из его поршневой полости происходит через подпорный клапан ПК, величина давления на ко-торое он настраивается не позволяет опорожняться камере высокого давления мультипли-катора. При падении давления в аккумуляторе А ниже величины настройки реле давления РД1, последнее включает для его подзарядки электромагнит Э1 гидрораспределителя Р1, который при этом переключается в правое положение.
Рис 16 Схема гидропривода обеспечивающего выдержку под давлением штока гидроцилиндра
В ряде случаев исполнительный или вспомогательный механизм машины приводимый гидравлическим двигателем, гидроцилиндром, или гидромотором в процессе работы должен делать остановки, сохраняя при этом определенное положение выходного звена, что накладывает на схему управления им дополнительные требования, особенно если эти остановки достаточно продолжительны по времени. Примером может служить механизм зажима заготовки, обрабатываемой на металлорежущем станке, приводимый гидроцилиндром питающимся от гидростанции, для которого время перемещения подвижных частей намного меньше времени обработки зажатой детали, в процессе которого шток приводного гидроцилиндра неподвижен. В этом случае в составе гидростанции обязательно должен быть предусмотрен гидроаккумулятор, обеспечивающий, при выдержке под давлением штока гидроцилиндра компенсацию утечек и разгрузку насоса, что особенно важно при длительном цикле зажима заготовки (см. Рис. 16). Он состоит из насоса Н электроуправляемого предохранительного клапана непрямого действия, гидрораспределителя Р пневмогидроаккумулятора А, двух реле давления РД1 и РД2, обратного клапана КО, и гидроцилиндра Ц. В данном гидроприводе аккумулятор используется для ускоренного перемещения штока гидроцилиндра и компенсации утечек в гидроцилиндре в период нахождения его штока в выдвинутом положении, под давлением, что позволяет разгрузить насос в этот период рабочего цикла оборудования и повысить КПД гидропривода в целом.
В этом случае в составе гидростанции обязательно должен быть предусмотрен гидроаккумулятор, обеспечивающий, при выдержке под давлением штока гидроцилиндра компенсацию утечек и разгрузку насоса, что особенно важно при длительном цикле зажима заготовки (см. Рис. 16). Он состоит из насоса Н электроуправляемого предохранительного клапана непрямого действия, гидрораспределителя Р пневмогидроаккумулятора А, двух реле давления РД1 и РД2, обратного клапана КО, и гидроцилиндра Ц. В данном гидроприводе аккумулятор используется для ускоренного перемещения штока гидроцилиндра и компенсации утечек в гидроцилиндре в период нахождения его штока в выдвинутом положении, под давлением, что позволяет разгрузить насос в этот период рабочего цикла оборудования и повысить КПД гидропривода в целом.
Работает гидропривод следующим образом. При включении электромагнита Э1, масло от насоса Н при закрытом предохранительном клапане КП через обратный КО поступает в пневмогидро ккумулятор А и через гидрораспределитель Р, который, находится в исходном левом положении в поршневую полость гидроцилитндра Ц и его шток выдвигается вперед до упора. Далее по мере зарядки аккумулятора А давление в напорной магистрали и в поршневой полости гидроцилиндра Ц возрастает до величины настройки РД2, срабатывание которого приводит к выключению электромагнита Э1и подаче масла от насоса Н на слив, закрытию обратного клапана КО и поддержанию давления в поршневой полости гидроцилиндра Ц пневмогидроаккумулятором А. Для возврата щтока гидроцилиндра Ц в исходное положение включаются электромагниты Э1 и Э2, при этом предохранительный клапан КП закрывается и масло от насоса Н и от аккумулятора А через гидрораспределитель Р, находящийся в правом положении поступает в штоковую полость гидроцилиндра Ц. При достижении штоком гидроцилиндра Ц исходного положения электромагнит Э1 отключается и масло от насоса Н идет на слив, обратный клапан КО закрывается, а аккумулятор А обеспечивает нахождение штока гидроцилиндра в исходном положении. При снижении давления в аккумуляторе А ниже величины настройки РД1 включается электромагнит Э1 и масло от насоса Н подается в аккумулятор пока не осуществится его подзарядка до давления равного величине настройки РД2.
Далее по мере зарядки аккумулятора А давление в напорной магистрали и в поршневой полости гидроцилиндра Ц возрастает до величины настройки РД2, срабатывание которого приводит к выключению электромагнита Э1и подаче масла от насоса Н на слив, закрытию обратного клапана КО и поддержанию давления в поршневой полости гидроцилиндра Ц пневмогидроаккумулятором А. Для возврата щтока гидроцилиндра Ц в исходное положение включаются электромагниты Э1 и Э2, при этом предохранительный клапан КП закрывается и масло от насоса Н и от аккумулятора А через гидрораспределитель Р, находящийся в правом положении поступает в штоковую полость гидроцилиндра Ц. При достижении штоком гидроцилиндра Ц исходного положения электромагнит Э1 отключается и масло от насоса Н идет на слив, обратный клапан КО закрывается, а аккумулятор А обеспечивает нахождение штока гидроцилиндра в исходном положении. При снижении давления в аккумуляторе А ниже величины настройки РД1 включается электромагнит Э1 и масло от насоса Н подается в аккумулятор пока не осуществится его подзарядка до давления равного величине настройки РД2.
Не менее важным, чем обеспечение заданного режима работы гидропривода, является выполнение заданного цикла работы приводимого механизма, который определяет последовательность и время работы гидродвигателей, входящих в состав гидропривода (гидроцилитндров, гидромоторов). Поэтому циклограмма работы гидропривода является основным исходным документом, на основании которого разрабатывается принципиальная гидравлическая схема. Однако на практике разработка циклограммы работы гидропривода и его принципиальная гидросхема выполняются разработчиком в рамках одного этапа проектирования, поскольку их большая зависимость и взаимное влияние не позволяет разделить этот процесс. Разработка циклограммы работы гидропривода позволяет увязать последовательность работы гидроаппаратов управления входящих в гидросхему и датчиков формирующих команды в зависимости от времени и величины перемещения исполнительного звена (штока гидроцилиндра, вала гидромотора), а также величины давления в напорной магистрали.
Основой для разработки циклограммы служит рабочий цикл гидропривола, который при ее построении рассматривается по элементам (переходам), что позволяет отследить от каких датчиков поступают команды на начало выполнения каждого перехода и какие гидроаппараты управления при этом срабатывают, а также какие датчики свидетельствуют об его окончании и как ведут себя при этом соответствующие гидроаппараты управления.
Поэтому циклограмма работы гидропривода содержит следующую информацию:
– порядковый номер перехода,
– содержание перехода,
– управляющий датчик,
– время цикла,
– включаемые электромагниты гидрораспределителей.
Кроме этого циклограмма работы гидропривода является основной частью техниче-ского задания на проектирование системы электроавтоматики, управляющей его рабочим циклом.
Рис 17 Кинематическая схема автоматизированного стеллажа накопителя
Рассмотрим построение циклограммы работы автоматизированного стеллажа накопителя, входящего в состав роботизированного комплекса для токарной обработки цилиндрических деталей типа кольца. Кинематическая схема стеллажа накопителя показана на Рис 17, а схема его гидропривода на Рис 18. Стеллаж содержит шаговый транспортер 1, загрузочный лоток 2, отводящий лоток 3 и отсекатель 4. Привод шагового транспортера включает гидроцилиндр Ц3, рейка 5 которого зацепляется с зубчатым колесом 6, являющимся обоймой обгонной муфты МО, которая посредствам упругой муфты МУ и зубчатой муфты с мышиным зубом МЗ соединяется с ведущим валом I транспортера на котором жестко закреплена ведущая звездочка Z1, соединенная посредствам втулочно – роликовой цепи 7 с ведомой звездочкой Z2, приводящей во вращенире ведущий вал II шагового транспортера 1, на котором в свою очередь закреплены транспортные звездочки Z3, Z5 связанные транспортными цепями 8 и 9 с ведомыми звездочками транспортера Z4, Z6 На цепях 8 и 9 шагового транспортера с постоянным шагом закреплены наклонные ячейки 10, в которые укладываются делали 15, при этом, произвольное выкатывание последних из ячеек исключается благодаря наличию упорной стенки 11, положение которой регулируется.
Кинематическая схема стеллажа накопителя показана на Рис 17, а схема его гидропривода на Рис 18. Стеллаж содержит шаговый транспортер 1, загрузочный лоток 2, отводящий лоток 3 и отсекатель 4. Привод шагового транспортера включает гидроцилиндр Ц3, рейка 5 которого зацепляется с зубчатым колесом 6, являющимся обоймой обгонной муфты МО, которая посредствам упругой муфты МУ и зубчатой муфты с мышиным зубом МЗ соединяется с ведущим валом I транспортера на котором жестко закреплена ведущая звездочка Z1, соединенная посредствам втулочно – роликовой цепи 7 с ведомой звездочкой Z2, приводящей во вращенире ведущий вал II шагового транспортера 1, на котором в свою очередь закреплены транспортные звездочки Z3, Z5 связанные транспортными цепями 8 и 9 с ведомыми звездочками транспортера Z4, Z6 На цепях 8 и 9 шагового транспортера с постоянным шагом закреплены наклонные ячейки 10, в которые укладываются делали 15, при этом, произвольное выкатывание последних из ячеек исключается благодаря наличию упорной стенки 11, положение которой регулируется. Отсекатель 4 для поштучной выдачи деталей 15, которым оснащен стеллаж, включает гидроцилиндр Ц4, на штоке которого установлен сектор 12, имеющий возможность совершать качательное движение при выдвижении и втягивании штока гидроцилиндра Ц4, а также упор 13, ограничивающий свободное движение деталей 15, который установлен с возможностью регулировки
Отсекатель 4 для поштучной выдачи деталей 15, которым оснащен стеллаж, включает гидроцилиндр Ц4, на штоке которого установлен сектор 12, имеющий возможность совершать качательное движение при выдвижении и втягивании штока гидроцилиндра Ц4, а также упор 13, ограничивающий свободное движение деталей 15, который установлен с возможностью регулировки
Рис 18 Гидравлическая схема автоматизированного стеллажа накопителя
Гидропривод стеллажа (см. Рис 18) состоит из серийно выпускаемой насосной установки УН типа Г48 – 32, пневмогидроаккумулятора А, трех реле давления РД1 – РД3, гидрораспределителей Р1 – Р5, обратных клапанов КО1, КО2, регуляторов потока РП1, РП2, двух гидроцилиндров фиксации транспортера Ц1 и Ц2, гидроцилиндра привода транспортера Ц3 и гидроцилиндра привода отсекателя Ц4. Гидрораспределитель Р1 при нахождении в левом положении осуществляет зарядку аккумулятора А перед началом цикла работы стеллажа, при нахождении Р1 в правом положении осуществляется подача масла к гидрораспределителям Р2 – Р4, управляющим работой гидроцилиндров Ц1 – Ц4, а при нахождении в нейтральном положении обеспечивается разгрузка насосов (в этом положении гидрораспределителя Р1 масло от насосов Н1 и Н2 идет на слив). Реле давления РД1, контролирующее нижний предел давления масла в аккумуляторе А, дает команду на его подзарядку при снижении давления ниже величины настройки реле. Реле давления РД2, контролирующее верхний предел давления в аккумуляторе А, дает команду на прекращение его зарядки при достижении давления в нем равного величине настройки реле. РД3 при достижении величины давления в поршневых полостях гидроцилиндров фиксации Ц1 и Ц2 дает команду на отключение подачи масла от насосной установки УН и включение подачи масла от аккумулятора А. Регулятор потока РП1 обеспечивает требуемую величину скорости возврата в исходное положении штока гидроцилиндра привода транспортера Ц3. Регулятор потока РП2 обеспечивает требуемую скорость выдвижения штока гидроцилиндра привода отсекателя Ц4. Гидрораспределитель Р5 служит для отключения аккумулятора А от поршневой полости гидроцилиндров фиксации транспортера Ц1 и Ц2 во время его зарядки и соединения с поршневыми полостями этих гидроцилиндров во время отключения подачи масла от насосной установки УН.
Реле давления РД1, контролирующее нижний предел давления масла в аккумуляторе А, дает команду на его подзарядку при снижении давления ниже величины настройки реле. Реле давления РД2, контролирующее верхний предел давления в аккумуляторе А, дает команду на прекращение его зарядки при достижении давления в нем равного величине настройки реле. РД3 при достижении величины давления в поршневых полостях гидроцилиндров фиксации Ц1 и Ц2 дает команду на отключение подачи масла от насосной установки УН и включение подачи масла от аккумулятора А. Регулятор потока РП1 обеспечивает требуемую величину скорости возврата в исходное положении штока гидроцилиндра привода транспортера Ц3. Регулятор потока РП2 обеспечивает требуемую скорость выдвижения штока гидроцилиндра привода отсекателя Ц4. Гидрораспределитель Р5 служит для отключения аккумулятора А от поршневой полости гидроцилиндров фиксации транспортера Ц1 и Ц2 во время его зарядки и соединения с поршневыми полостями этих гидроцилиндров во время отключения подачи масла от насосной установки УН. Обратные клапаны КО1 и КО2 служат для отсечки магистаралей соединяющих аккумулятор с гидрораспределителем Р1 после прекращения его зарядки и при подаче масла аккумулятором А в поршневую полость гидроцилиндров Ц1 и Ц2.
Обратные клапаны КО1 и КО2 служат для отсечки магистаралей соединяющих аккумулятор с гидрораспределителем Р1 после прекращения его зарядки и при подаче масла аккумулятором А в поршневую полость гидроцилиндров Ц1 и Ц2.
Работает автоматизированный стеллаж следующим образом. Предварительно все кассеты 10 шагового транспортера 1 и отводящий лоток 3 загружены деталями 15. После того как деталь 15 прошедшая предварительную обработку на токарном станке и подлежащая последующей обработке установлена схватом робота в подающий лоток 2, срабатывает датчик ВК7, который дает команду на включение гидроцилиндра Ц4 привода отсекателя. При этом шток гидроцилиндра Ц4 выдвигается и поворачивает по часовой стрелке сектор 12, что приводит к перекатыванию одной заготовки через упор 13 и попаданию ее в призму 14, откуда ее забирает робот, затем шток гидроцилиндра Ц4 возвращается в исходное положение вместе с сектором 12. После того как произошла последовательная подача в токарный станок трех деталей 15 их обработка и укладка в лоток 2 (три раза срабатывает датчик ВК7), что свидетельствует о том, что верхняя кассета 10 шагового транспортера 1 полностью опорожнена, происходит переключение гидрораспределителей Р1 и Р2 в правое положение, в результате чего масло от насосной установки УН через гидрораспределитель Р1 и Р2 поступает в штоковые полости гидроцилиндров Ц1 и Ц2, штоки которых втягиваются, осуществляя расфиксацию цепи шагового транспортера. Далее подается команда на включение шагового транспортера, для чего гидрораспределитель Р3 переключается в правое положение, и масло от насосной установки УН через гидрораспредедители Р1 и Р3 поступает в поршневую полость гидроцилиндра Ц3, а из его штоковой полости идет на слив. Это приводит к выдвижению штока-рейки 5, которая своей зубчатой частью взаимодействует с зубчатым колесом 6, и вращая ее, заклинивает ролики обгонной муфты МО, в результате чего вращение через упругую муфту МУ и зубчатую муфту МЗ передается звездочке Z1, а посредствам цепи 7 звездочке Z2, которая находясь на одном валу II с ведущими звездочками Z3, Z5 шагового транспортера 1, перемещает его транспортные цепи 8 и 9 вместе с кассетами 10 на шаг. В результате этого очередная партия деталей 15 из верхней кассеты 10 транспортера попадает в отводящий лоток 3. Далее осуществляется фиксация верхней кассеты 10 шагового транспортера, которая происходит при переключении гидрораспределителя Р2 в левое положение, в результате чего масло от насосной установки УН через гидрораспределители Р1 и Р2 поступает в поршневые полости гидроцилиндров Ц1, Ц2, а из их штоковых полостей идет на слив, при этом их штоки выдвигаются и входят в конусные отверстия кассеты 10.
Далее подается команда на включение шагового транспортера, для чего гидрораспределитель Р3 переключается в правое положение, и масло от насосной установки УН через гидрораспредедители Р1 и Р3 поступает в поршневую полость гидроцилиндра Ц3, а из его штоковой полости идет на слив. Это приводит к выдвижению штока-рейки 5, которая своей зубчатой частью взаимодействует с зубчатым колесом 6, и вращая ее, заклинивает ролики обгонной муфты МО, в результате чего вращение через упругую муфту МУ и зубчатую муфту МЗ передается звездочке Z1, а посредствам цепи 7 звездочке Z2, которая находясь на одном валу II с ведущими звездочками Z3, Z5 шагового транспортера 1, перемещает его транспортные цепи 8 и 9 вместе с кассетами 10 на шаг. В результате этого очередная партия деталей 15 из верхней кассеты 10 транспортера попадает в отводящий лоток 3. Далее осуществляется фиксация верхней кассеты 10 шагового транспортера, которая происходит при переключении гидрораспределителя Р2 в левое положение, в результате чего масло от насосной установки УН через гидрораспределители Р1 и Р2 поступает в поршневые полости гидроцилиндров Ц1, Ц2, а из их штоковых полостей идет на слив, при этом их штоки выдвигаются и входят в конусные отверстия кассеты 10. При этом давление в поршневых полостях гидроцилиндров фиксации Ц1 и Ц2 возрастает до величины настройки реле давлении РД3, которое дает команду на переключение гидрораспределителя Р3 в левое положение, и как следствие масло от насосной установлки УН поступает в штоковую полость гидроцилиндра Ц3 и сливается из его поршневой полости, что приводит к возврату его штока – рейки 5 в исходное проложенеие (при этом, обгонная муфта МО расклинивается и не препятствует свободному вращению зубчатого колеса 6 в обратном направлении). После этого поступает команда на переключение гидрораспределителя Р1 в нейтральное положение и масло от насосов Н1 и Н2 идет на слив, а внутренние утечки в гидроцилиндрах фиксации Ц1 и Ц2 компенсируются пневмогидроаккумулятором А, который при этом отсечен от обоих магистралей гидрораспределителя Р1 обратными клапанами КО1 и КО2. Далее цикл работы стеллажа повторяется, пока не будет обработана вся партия заготовок.
При этом давление в поршневых полостях гидроцилиндров фиксации Ц1 и Ц2 возрастает до величины настройки реле давлении РД3, которое дает команду на переключение гидрораспределителя Р3 в левое положение, и как следствие масло от насосной установлки УН поступает в штоковую полость гидроцилиндра Ц3 и сливается из его поршневой полости, что приводит к возврату его штока – рейки 5 в исходное проложенеие (при этом, обгонная муфта МО расклинивается и не препятствует свободному вращению зубчатого колеса 6 в обратном направлении). После этого поступает команда на переключение гидрораспределителя Р1 в нейтральное положение и масло от насосов Н1 и Н2 идет на слив, а внутренние утечки в гидроцилиндрах фиксации Ц1 и Ц2 компенсируются пневмогидроаккумулятором А, который при этом отсечен от обоих магистралей гидрораспределителя Р1 обратными клапанами КО1 и КО2. Далее цикл работы стеллажа повторяется, пока не будет обработана вся партия заготовок.
Разработка циклограммы начинается с установления датчиков, контролирующих положения гидроцилиндров и электромагнитов, осуществляющих переключение гидрораспределителей, управляющих работой гидроцилиндров, из одного положения в другое
Выдвинутое положение штоков гидроцилиндров фиксации Ц1 и Ц2 контролируется реле давления РД3 по величине давления в их поршневой полости, втянутое положение – конечными выключателями ВК1 и ВК2, а управление гидрораспределителями Р2 и Р5 осуществляется электромагнитами Э3 и Э6.
Выдвинутое положение штока гидроцилиндра привода транспортера Ц3 контролируется конечным выключателем ВК3, втянутое положение – конечным выключателем ВК4, а управление гидрораспределителем Р3 осуществляется электромагнитом Э4.
Выдвинутое положение штока гидроцилиндра привода отсекателя Ц4 контролируется конечным выключателем ВК5, втянутое положение – конечным выключателем ВК6, а управление гидрораспределителем Р4 осуществляется электромагнитом Э5, при этом команда на выдвижение штока подается конечным выключателем ВК7.
Первый элемент цикла, с которого начинается работа стеллажа, это зарядка аккумулятора. Он выполняется путем переключения гидрораспределителя Р1, при работаю-щей насосной установке УН, из нейтрального положения в левое за счет включения электромагнита Э1 и заканчивается при достижении давления масла в аккумуляторе величине настройки реле давления РД2 (см. Рис 19).
Рис 19 Циклограмма работы автоматизированного стеллажа
Второй элемент цикла – выдвижение штока гидроцилиндра привода отсекателя Ц4, которое происходит при поступлении команды от конечного выключятеля ВК7 и ВК6 и заканчивается срабатыванием конечного выключателя ВК5, при этом включены электромагниты Э2 и Э5 гидрораспрепделителей Р1 и Р4. Время выполнения данного элемента цикла (перехода) t определяется исходя из расхода насосной установки Q и объема V соответствующей полости гидроцилиндра в которую подается масло: t = V/Q ; (tф2= 1,4сек).
Время выполнения данного элемента цикла (перехода) t определяется исходя из расхода насосной установки Q и объема V соответствующей полости гидроцилиндра в которую подается масло: t = V/Q ; (tф2= 1,4сек).
Третий элемент цикла – втягивание штока гидроцилиндра Ц4, которое происходит после команды от конечного выключателя ВК5 и заканчивается срабатыванием конечного выключателя ВК6, при этом включен электромагнит Э2 гидрораспределителя Р1. и выключенном электромагните Э5 гидрораспределителя Р4. Время выдвижения штока tф3= 1,1сек.
Четвертый и шестой элементы цикла соответствуют второму элементу
Пятый и седьмой элементы цикла соответствуют третьему элементу.
Восьмой элемент цикла – втягивание штоков гидроцилиндров фиксации транспортера Ц1 и Ц2, которое происходит при поступлении команды от конечных выключателей ВК4 и ВК7 и заканчивается срабатыванием конечных выключателей ВК1, ВК2, при этом включены электромагниты Э2, Э3, Э6 гидрораспределителей Р1, Р2, Р5. Время втягивания штоков гидроцилиндров Ц1 и Ц2 tф8= 0,8сек.
Время втягивания штоков гидроцилиндров Ц1 и Ц2 tф8= 0,8сек.
Девятый элемент цикла – выдвижение штока гидроцилиндра привода транспортера Ц3, которое происходит при поступлении команды от конечных выключателей ВК1 и ВК2 и заканчивается срабатыванием конечного выключателя ВК3, при этом включены электромагниты Э2, Э3, Э4, Э6 Гидрораспределителей Р1, Р2, Р3, Р5. Время выдвижения штока гидроцилиндра Ц3, tф9= 3,6сек.
Десятый элемент цикла – выдвижение штоков гидроцилиндров фиксации транспортера Ц1, Ц2, которое происходит при поступлении команды от конечного выключателя ВК3 и заканчивается срабатыванием реле давления РД3, при этом включены электромагниты Э2, Э4, Э6. Время выдвижения штоков гидроцилиндров Ц1 и Ц2 tф10= 0,9сек.
Одинадцатый элемент цикла – работа аккумулятора который обеспечивает поддержания необходимого давления в поршневых полостях гидроцилиндров фиксации Ц1 и Ц2, а также компенсацию утечек в них при отключенной подаче масла (гидрораспределитель Р1 находится в нейтральном положении). Он осуществляется при поступлении команды от реле давления РД3 и заканчивается срабатыванием конечного выключателя ВК7, при этом все электромагниты выключены.
Он осуществляется при поступлении команды от реле давления РД3 и заканчивается срабатыванием конечного выключателя ВК7, при этом все электромагниты выключены.
Двенадцатый элемент цикла – втягивание штока гидроцилиндра привода транспортера Ц3, которое происходит при поступлении команды от РД3 и выполняется параллельно с одиннадцатым элементом цикла до срабатывания конечного выключателя ВК4, при этом включен электромагнит Э2 гидрораспределителя Р1. Время втягивания штока гидроцилиндра Ц3 tф12= 1,0сек
Тринадцатый элемент цикла – подзарядка аккумулятора А, которая происходит по команде от реле давления РД1, которое фиксирует падения давления ниже величины его настройки, и заканчивается при срабатывании реле давления РД2, при этом срабатывает электромагнит Э1 и Э6 гидрораспределителей Р1 и Р5.
Исходные данные и результаты расчетов времени выполнения отдельных переходов рабочего цикла приведены в таб. 1. Расчет времени выдвижения штока гидроцилиндра привода транспортера Ц3 выполнен исходя из того, что 20% времени будут работать оба насоса Н1 и Н2 насосной установки с производительностью 23 л/мин, а 80% времени только насос высокого давления Н1 с производительностью 8 л/мин.
ЛИТЕРАТУРА
1. Игнатьев Н. П. Основы проектирования. Учебное пособие в двух частях Азов 2011г.
2. Свешников В.К. Станочные гидроприводы .Справочник М.: Машиностроение 1982г
Для приобретения полной версии статьи добавьте ее в корзину
Стоимость полной версии статьи 150 руб
1.3 Определение расхода жидкости, необходимого для получения скорости перемещения рабочего органа. Гидроцилиндр с односторонним штоком
Похожие главы из других работ:
Герметичный электронасос
2.6.1 Определение среднего момента скорости жидкости на выходе из шнека
, где…
Герметичный электронасос
2.6.3 Определение пороговой скорости жидкости для шнека
Для лопастного насоса принимаем . Для стали 12Х13 временное сопротивление . Плотность трансформаторного масла . Пороговая скорость жидкости для шнека: . Имеем Условие отсутствия кавитационной эррозии выполняется. ..
..
Герметичный электронасос
2.6.5 Определение пороговой скорости жидкости для центробежного колеса
. Имеем Условие отсутствия кавитационной эррозии выполняется. Таким образом, спроектированная ступень насоса удовлетворяет условиям длительной работы…
Гидравлический расчет объемного гидропривода механизма подачи круглопильного станка
2.4. Определение расхода рабочей жидкости в гидроцилиндре
Таблица 4 Расчетные формулы для определения расхода рабочей жидкости в гидроцилиндрах Тип гидроцилиндра Расчетная формула для определения расхода рабочей жидкости в гидроцилиндрах Qц (м3/с) при выходе штока из гидроцилиндра входе…
Гидравлический расчет простого трубопровода
4 ЭТАП. ОПРЕДЕЛЕНИЕ СКОРОСТИ ИСТЕЧЕНИЯ ЖИДКОСТИ ИЗ ТРУБОПРОВОДА. ОПРЕДЕЛЕНИЕ РАСХОДА ЖИДКОСТИ В ТРУБОПРОВОДЕ
Подставляем значения найденных коэффициентов гидравлического трения лi и коэффициентов местного сопротивления жj в формулу (3), определяя из нее значение скорости истечения жидкости из трубопровода:
. ..
..
Гидродинамический привод
4.4 Определение действительной скорости жидкости
Действительная скорость движения жидкости рабочей жидкости определяется по формуле: Vd`=4·Q/р Значения действительной скорости трубопроводов: Vд,в,с=4·295/(3,14·)=115,9 см/с Vд,нг=4·295/(3,14·)=334,4 см/с Vд,с=4·295/(3,14·)=171…
Проектирование объемного гидропривода движения подачи шлифовального станка
11. Определение минимально необходимого объема жидкости
Определяем минимальный объем рабочей жидкости Vmin.объем, дм3, необходимого для нормальной работы гидропривода, по формуле: (0) Принимаем по ГОСТ 12448-80 [1] стандартный объем бака для рабочей жидкости: Vбака = 40 дм3…
Расчет гидравлического привода для трактора ЛТ-154
4.1 Определение расхода рабочей жидкости
Расход жидкости в гидросистеме без учета потерь найдем по формуле: где Q – расход жидкости в гидросистеме, м3/мин А- площадь поршня, м2 V – скорость поршня.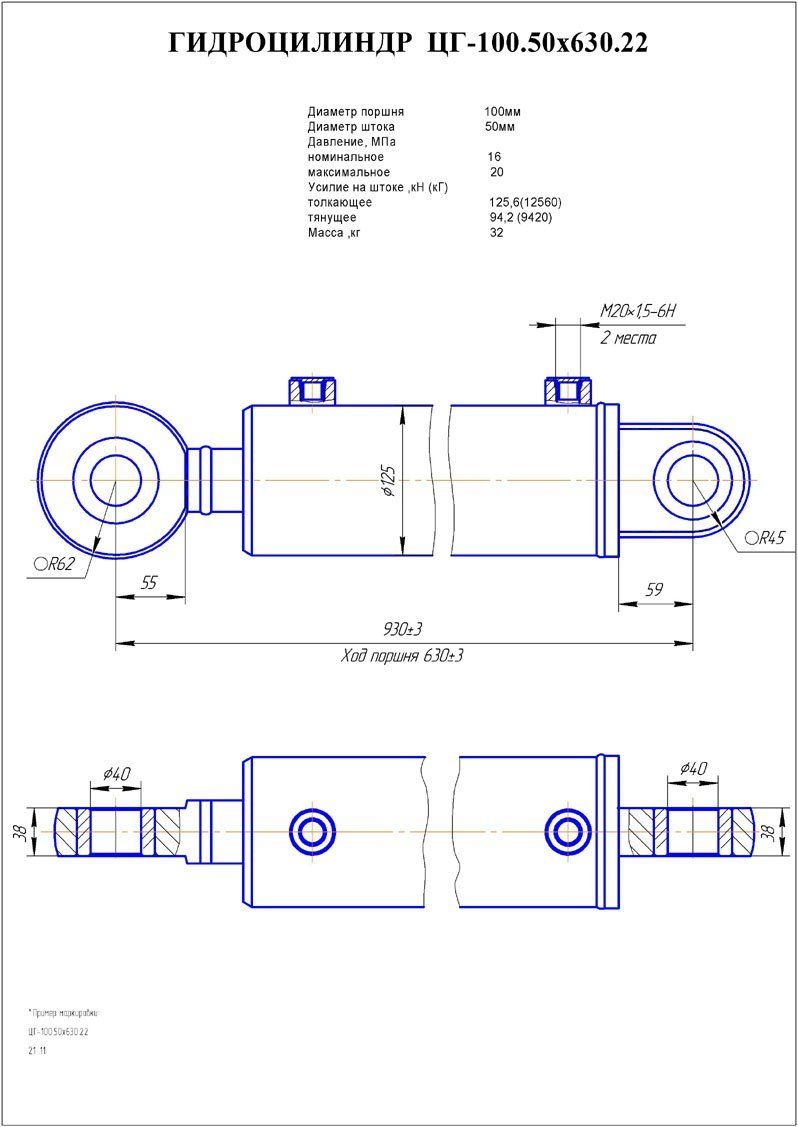 ..
..
Расчет гидравлической циркуляционной установки
4.1.1 Определение расхода жидкости
Расходом потока называется количество жидкости, протекающее через некоторое поперечное сечение потока в единицу времени. Это сечение должно быть сделано так, чтобы обязательно пересекало каждую элементарную струйку и только один раз…
Расчет и проектирование загрузочного устройства
2.3.2 Определение расхода жидкости в гидроцилиндре
Расчетный расход жидкости, подаваемой в поршневую полость гидроцилиндра с учетом утечек жидкости в гидроцилиндре: Q = (V•S1)/; где S1 =8655 мм2=0.008655 м2; .- объемный КПД гидроцилиндра, значение которого при использовании манжетных уплотнений =0…
Расчет и проектирование загрузочного устройства
2.4.2 Определение расхода жидкости в гидроцилиндре
Расчетный расход жидкости, подаваемой в поршневую полость гидроцилиндра с учетом утечек жидкости в гидроцилиндре: Q = (V • S1)/; где S1 =3318 мм2=0,003318 м2; . – объемный КПД гидроцилиндра, значение которого при использовании манжетных уплотнений =0…
Расчет параметров исполнительного устройства с учетом регулируемой среды (молоко известковое)
1.3.1 Определение давления, необходимого для создания скорости потока на выходе из трубопровода
Давление, необходимое для создания скорости потока на выходе трубопровода. Данное давление определяется по формуле: ; (1.5) где с – плотность среды, кг/м3; с = 2360 кг/м3; v – скорость потока среды, м/с; v = 1,1м/с….
Расчет тягового усилия и мощности привода конвейера
1. Определение скорости движения тягового органа конвейера
При непрерывном движении конвейера его производительность определяется по формуле: , где х – скорость движения конвейера, м/мин; z – число изделий на платформе; tT – шаг тележек, м; kн – коэффициент неравномерности загрузки конвейера (kн = 1,15-1…
Расчет эксплуатационных параметров проходческо-очистного комбайна Урал-20Р
5.
2 Расчет тяговой способности, напорного усилия и мощности гусеничного органа перемещенияТяговая способность гусеничного органа перемещения зависит от сил прижатия гусениц к почве выработки (R1, R2) и от коэффициента сцепления (f)…
Типовой расчет гидравлического привода проходческого комбайна
2.4 Определение расхода жидкости
Расход рабочей жидкости гидромотора находится согласно выражениям: QM max=(qдnmax)/о, (2.3) QM min=(qдnmin)/о, (2.4) где QM max и QM max – соответственно максимальный и минимальный расход жидкости…
Гидроцилиндры на заказ с доставкой и обслуживанием в России
Гидроцилиндр представляет собой важный рабочий орган при производстве станков, гидропрессов, специального оборудования, а также огромного количество спецтехники (экскаваторов, погрузчиков, тракторов, всевозможных подъемных устройств и механизмов).
Основная классификация гидроцилиндров складывается из особенностей конструкции самого устройства, в результате которой все гидроцилиндры делятся на односторонние и двухсторонние.
Также классификация гидроцилиндров происходит по типу действия устройств.
При этом можно выделить — телескопические, поворотные и поршневые гидроцилиндры. Поворотные гидроцилиндры применяются тогда когда необходимо произвести деформацию некоторого оборудования, поршневые с действием двухстороннего типа часто применяют в приводах различной спецтехники.
Очень часто при производстве спецтехники используют телескопические цилиндры, которые могут содержать от двух и более вложенных отдельных цилиндров.
Такие гидроцилиндры применяют силовой принцип, так что общий ход штоков превосходит длину самого корпуса цилиндра. В основном силовые телескопические цилиндры используют при производстве автокранов для подъема различных грузов.
Важным параметром при выборе гидроцилиндра является (номинальное) давление, ход и диаметр штока и поршня. Основополагающим фактором является номинальная мощность гидроцилиндра, а диаметр поршня и штока характеризуют рабочее усилие, совершаемое устройством.
Рекомендуемые диаметры подводящих отверстий выбираются в зависимости от максимальной скорости поршня и максимальной скорости потока жидкости в проходном отверстии.
В таких отраслях машиностроения, как станкостроение, тракторное и сельскохозяйственное машиностроение, дорожное и горное машиностроение, — скорость потока жидкости и нагнетательных трубопроводах, с целью уменьшения потерь напора, принимается до 0,5м/сек.
Скорость перемещения поршня в гидроцилиндре может быть разной. Однако на практике скорость поршня более 0,5 м/c встречается редко.
Одним из рекомендуемых параметров гидроцилиндра является заделка штока в цилиндре – расстояние от середины поршня до середины направляющей штока при выдвинутом штоке.
При монтаже силовых гидроцилиндров в гидросистемах следует применять такие методы крепления, которые не допускают вовсе или сводят до минимума боковые нагрузки на шток. Эти нагрузки приводят к быстрому выходу из строя уплотнений и износу деталей цилиндра.
При наличии боковых нагрузок следует максимально улучшать направление штока и увеличивать его заделку в цилиндре. Увеличение заделки ведет к увеличению габаритов гидроцилиндров по длине, поэтому необходимо выбрать оптимальную величину заделки.
Для верхнего предела хода поршня, ограниченного в 10 диаметров, рекомендуется величина заделки не меньше 10% от максимального хода.
Предлагаем Вашему вниманию машиностроительную продукцию Завода гидравлического оборудования «Гидроласт», который производит гидравлические цилиндры на базе комплектующих Gidrolast Srl, Италия.
Так как основным направлением является изготовление гидроцилиндров «под заказ», то можно изменить, практически любой параметр стандартных гидроцилиндров. Все параметры требуемого гидроцилиндра оговариваются и согласовываются на сборочном чертеже, предоставленном до начала производства.
Ниже перечислены диапазоны основных параметров производимых на заводе гидроцилиндров:
| Диаметр поршня | от 30 мм до 1 500 мм |
| Диаметр штока | от 20 мм, до 800 мм |
| Ход штока | от 50 мм до 15 000 мм |
| Максимальное давление испытаний | 45 МПа |
| Температура эксплуатации | -50 С до +180 С |
По заказу клиента любой параметр стандартных гидроцилиндров может быть изменен, вплоть до совершенно нестандартной конструкции.
Все параметры требуемого гидроцилиндра оговариваются в опросном листе заказа или в чертежах, подготавливаемых до начала производства гидроцилиндров по заказу.
Ниже перечислены параметры, которые мы можем изменить или изготовить по требованиям заказчика.
- Рабочий ход поршня гидроцилиндра. Наше оборудование позволяет выпускать гидроцилиндры с рабочим ходом поршня вплоть до 12 м.
- Диаметр поршня. Мы можем изготовить гидроцилиндры с диаметром поршня до 1500 мм.
- Диаметр штока гидроцилиндра. Наше производство гидроцилиндров позволяет выпускать штоки диаметром 300 мм и более.
- Крепление гидроцилиндра. Механическое крепление гидроцилиндра может быть выполнено в соответствии со стандартами или изменено по требованиям заказчика. На нашем производстве выпускаются гидроцилиндры жесткого закрепления, с проушинами, со встроенными шаровыми или подшипниковыми шарнирами.
- Рабочее давление гидроцилиндра и присоединение к гидросистеме. Рабочее давление гидроцилиндра может быть любым в диапазоне до 40 МПа (400 бар). На цилиндрах устанавливаются штуцеры для стандартного присоединения к гидросистеме или можно использовать любое подсоединение в соответствии с требованиями заказчика.
- Рабочая жидкость. Изготовление гидроцилиндров включает использование хромированных штоков, что обеспечивает возможность работы с любыми рабочими жидкостями, химический состав которых допускается доступными сальниками уплотнений. При приеме заказа на производство гидроцилиндра клиент сообщает нам требования к герметичным уплотнениям.
 Рабочее давление гидроцилиндра может быть любым в диапазоне до 40 МПа (400 бар). На цилиндрах устанавливаются штуцеры для стандартного присоединения к гидросистеме или можно использовать любое подсоединение в соответствии с требованиями заказчика.
Рабочее давление гидроцилиндра может быть любым в диапазоне до 40 МПа (400 бар). На цилиндрах устанавливаются штуцеры для стандартного присоединения к гидросистеме или можно использовать любое подсоединение в соответствии с требованиями заказчика.Для нас нет ограничений по диаметру поршня, штока, хода штока и грузоподъемности, так как наша компания собственными силами производит гидравлические компоненты для тяжелого машиностроения с большим опытом поставок.
Мы предоставляем гарантию в 1 год, но при необходимости она может быть увеличена до 5-ти лет. Обязательное условия продажи цилиндров – наличие сертификата соответствия ГОСТ РФ и паспорта качества.
Все гидроцилиндры проходят испытания, согласно ГОСТ и на все гидроцилиндры выдается заводская гарантия.
Как поток жидкости может повлиять на скорость гидравлического цилиндра
«За последние несколько месяцев мы заметили, что один из наших гидроцилиндров периодически ускоряется. Вы знаете, почему это происходит и является ли это общей проблемой?»
Увеличение скорости гидроцилиндра – редкое явление. Чтобы лучше понять проблему, давайте рассмотрим гораздо более распространенный случай уменьшения скорости и применим противоположную логику.
Что касается гидравлических систем, снижение производительности обычно является первым признаком того, что проблема проявляется в системе. Чаще всего на это указывает более продолжительное время цикла и более медленная работа.
Основная причина этих симптомов отказа часто может быть связана с потоком жидкости. Поток жидкости в гидравлической системе определяет скорость и скорость реакции привода. Потеря потока приравнивается к потере скорости.
Потеря потока приравнивается к потере скорости.
Применение этой же логики к увеличенной скорости цилиндра будет означать, что происходит больший поток.Что может произойти в гидравлической системе, что со временем вызовет увеличение расхода?
Внутренняя утечка – если внутренняя утечка засоряется, поток неизбежно увеличивается.
Изменение вязкости – если вязкость уменьшится, расход увеличится (в зависимости от насоса и конструкции системы).
Разрушение фильтра или неисправность байпаса – если фильтр вызывал снижение потока, а затем лопнул, или возникла неисправность в байпасе, которая позволила потоку увеличиться, то и то, и другое привело бы к увеличению скорости цилиндра.
Воздухововлечение – воздух в жидкости приведет к плохой (медленной) работе. Если проблема с воздухом будет устранена, система ускорится.
Масляная линия очищена – если ограниченная или заблокированная масляная линия становится неограниченной / разблокированной, поток жидкости увеличивается.
Изменение нагрузки – уменьшение нагрузки на цилиндр может увеличить скорость вращения цилиндра.

Это всего лишь несколько вещей, которые могут беспокоить гидравлическую систему. Чтобы обеспечить более полную диагностику, необходимо знать больше деталей, таких как конструкция системы, состояние уплотнения, тип и возраст фильтра, уровни загрязнения, положение цилиндра и т. Д.
Имейте в виду, что не все гидроцилиндры одинаковы. По оценкам, до 25 процентов отказов механического оборудования связаны с конструкцией. Что касается гидроцилиндров, это говорит о том, что каждый четвертый не имеет соответствующей конструкции для той области применения, в которой они работают.Таким образом, если гидроцилиндр периодически выходит из строя, вполне вероятно, что потребуются изменения конструкции, чтобы разорвать круг отказов и ремонта.
Синусоидальное движение Расчет гидроцилиндра
Простейшей гармонической синусоидальной вибрацией управляемой оси цилиндра является циклическое выдвижение и втягивание штока поршня. Но совершенно нерегулярные профили перемещения также можно описать математически, взяв за основу синусоидальное движение в каждой точке.
Упрощенный расчет, интегрированный в конфигуратор продукта HäKo, предназначен для расчета динамического движения в синусоидальном режиме. При этом в основном учитываются данные по цилиндрам; другие важные для системы компоненты, такие как шланги или клапаны, и их утечки не рассматриваются.
Синусоидальное движение определяется вводом амплитуды и частоты. Таким образом, расчет определяет соответствующие максимальные значения перемещения, которые, однако, в случае синусоидального колебания не возникают одновременно.Например, скорость имеет максимальное значение в момент, когда значение ускорения равно нулю.
Для определения размера цилиндра этого достаточно для типовой конструкции.
Этот расчет не заменяет моделирование всей гидравлической системы, которое требуется в особых случаях, например, когда система достигает своих проектных пределов.
Расчет используется для расчета движения в синусоидальном режиме.Он не распространяется на поведение при включении или выключении гидравлической системы.
Расчет сил
Сила цилиндра F b при рабочем давлении – это сила, которая достигается при динамической работе. Рабочее давление – это фактическое давление p b в камере цилиндра, которое достигается за регулирующим клапаном.
F b = p b • A
с эффективной площадью поршня, рассчитанной с использованием отверстия D 2 K и диаметра штока поршня d 2 s
A = π / 4 • (D 2 K – d 2 с )
Сила цилиндра F s при давлении в системе – это сила, которая достигается при статической работе.Давление в системе – это давление p s перед регулирующим клапаном, которое обеспечивается агрегатом.
F с = p с • A
Динамическое синусоидальное движение
При синусоидальном движении во время динамической работы между
будут возникать физические корреляции.
- амплитуда +/- x – фактический ход хода при вибрации
- speed v – текущая скорость поршня (постоянно меняется в процессе вибрации)
- ускорение a – текущее ускорение поршня (постоянно меняется в процессе вибрации)
- частота f – последовательность хода движения, обозначенная как количество колебаний в единицу времени
| Максимальное значение |
| v = 2 π f x |
| a = 4 π 2 f 2 x |
Это дает макс.расход Q, необходимый для движения
Q = v • A
с эффективной площадью поршня A
A = π / 4 • (D 2 Kolben – d 2 Stange )
и ускоряющая сила F a , создаваемая цилиндром
.F a = m • a
На основе рассчитанного таким образом максимального ускорения и движущейся массы можно рассчитать ускоряющую силу, которую цилиндр должен создать. Собственная масса поршневого штока учитывается в программе расчета; дополнительные движущиеся массы должны быть указаны в соответствующем поле.
Собственная масса поршневого штока учитывается в программе расчета; дополнительные движущиеся массы должны быть указаны в соответствующем поле.
Рекомендация сервоклапана
Давление в системе p s рассчитывается следующим образом с учетом падения давления Δp в регулирующем клапане:
p b = p с – Δp
Для регулирующих клапанов падение давления регулирующего клапана обычно указывается как 70 бар или 10 бар при номинальном расходе.Однако во время работы это будет зависеть от фактического расхода.
Программа предложит номинальный расход для возможного регулирующего клапана на основе требуемого расхода. Также рассчитывается перепад давления для этого случая. Это дает быстрый обзор требуемого класса размера клапана.
Теперь необходимо прибавить потоки утечки масла из системы уплотнения и сервоклапана к расчетному значению расхода.
Эта конструкция не делает ненужным точное определение клапана и конструкцию.
Гидравлические цилиндры
Площадь глухого конца цилиндра (в квадратных дюймах)
Диаметр (дюймы) Площадь
знак равно Пример: Какова площадь цилиндра диаметром 6 дюймов? Формула: π x (радиус цилиндра) 2 = квадратные дюймыПлощадь конца штока цилиндра (в квадратных дюймах)
Площадь глухого конца цилиндра (кв. Дюйм) Диаметр штока (дюймы) Площадь
знак равно Пример: Какова площадь конца штанги цилиндра диаметром 6 дюймов со штоком диаметром 3 дюйма? Формула: Площадь глухого конца – Площадь стержня = квадратные дюймыВыходное усилие цилиндра (в фунтах)
Давление (PSI) цил.Площадь глухого конца (кв. Дюйм) Диаметр стержня (дюймы) Толкающая сила
знак равно Пример: Какова сила тяги цилиндра диаметром 6 дюймов со штоком диаметром 3 дюйма, работающего при давлении 2500 фунтов на квадратный дюйм? Формула: Давление (в фунтах на кв. Дюйм) x Площадь конца цилиндрической штанги = Сила в фунтах
Дюйм) x Площадь конца цилиндрической штанги = Сила в фунтахДавление жидкости в фунтах на квадратный дюйм, необходимое для подъема груза (в фунтах на квадратный дюйм)
фунтов силы, необходимой цил. Площадь глухого конца (кв. Дюйм) Требуемое давление
знак равно Пример: Какое давление необходимо для развития толкающей силы 50 000 фунтов из цилиндра диаметром 6 дюймов? Формула: фунтов необходимой силы ÷ Площадь цилиндра = PSIфунтов силы, необходимой цил.Площадь конца штанги (кв. Дюйм) Требуемое давление
знак равно Пример: Какое давление необходимо для развития тягового усилия 50 000 фунтов из цилиндра диаметром 6 дюймов со штоком диаметром 3 дюйма? Формула: фунтов необходимой силы ÷ Площадь цилиндра = PSIСкорость цилиндра (в дюймах в секунду)
галлонов в минуту (галлонов в минуту) Чистая площадь цилиндра (кв.
 Дюйм) Скорость знак равно Пример: Насколько быстро будет выдвигаться цилиндр диаметром 6 дюймов со штоком диаметром 3 дюйма при расходе 15 галлонов в минуту? Формула: (231 x GPM) ÷ (60 x Чистая площадь цилиндра) = дюймы в секунду
Дюйм) Скорость знак равно Пример: Насколько быстро будет выдвигаться цилиндр диаметром 6 дюймов со штоком диаметром 3 дюйма при расходе 15 галлонов в минуту? Формула: (231 x GPM) ÷ (60 x Чистая площадь цилиндра) = дюймы в секундугаллонов в минуту (галлонов в минуту) Чистая площадь цилиндра (кв. Дюйм) Скорость
знак равно Пример: Как быстро он будет втягиваться? Формула: (231 x GPM) ÷ (60 x Чистая площадь цилиндра) = дюймы в секундугалл / мин потока, необходимого для скорости цилиндра
Площадь цилиндра (кв. Дюйм) Длина хода (дюймы) Время хода (секунды) Требуемый расход
знак равно Пример: Сколько галлонов в минуту необходимо, чтобы удлинить цилиндр диаметром 6 дюймов на 8 дюймов за 10 секунд? Формула: Площадь цилиндра x длина хода в дюймах ÷ 231 x 60 ÷ Время в секундах для одного хода = галлонов в минутуПлощадь цилиндра (кв.
 Дюйм) Длина хода (дюймы) Время хода (секунды) Требуемый расход знак равно Пример: Если цилиндр имеет шток диаметром 3 дюйма, сколько галлонов в минуту необходимо, чтобы втянуть 8 дюймов за 10 секунд? Формула: Площадь цилиндра x длина хода в дюймах ÷ 231 x 60 ÷ Время в секундах для одного хода = галлонов в минуту
Дюйм) Длина хода (дюймы) Время хода (секунды) Требуемый расход знак равно Пример: Если цилиндр имеет шток диаметром 3 дюйма, сколько галлонов в минуту необходимо, чтобы втянуть 8 дюймов за 10 секунд? Формула: Площадь цилиндра x длина хода в дюймах ÷ 231 x 60 ÷ Время в секундах для одного хода = галлонов в минутуВыход на глухой конец цилиндра (галлонов в минуту)
Площадь глухого конца (кв. Дюйм) Конечная площадь штанги (кв. Дюйм) Вход галлонов в минуту, галлонов в минуту Выход
знак равно Пример: Сколько галлонов в минуту выходит через глухой конец цилиндра диаметром 6 дюймов со стержнем диаметром 3 дюйма, когда в конец стержня вводится 15 галлонов в минуту? Формула: Площадь глухого конца ÷ Площадь конца штанги x Входящий галлон в минуту = Выходной галлон в минутуЭта компания не несет ответственности за ошибки в данных или за безопасную и / или удовлетворительную работу оборудования, разработанного на основе этой информации.

Как быстро вы можете заставить цилиндр двигаться?
Хорошо, если это не тяжелый вопрос. За прошедшие годы больше людей, чем вы ожидали, предложили эту загадку, и хотя на этот сложный вопрос может не быть однозначного ответа, существует множество переменных, которые следует учитывать при попытке ответить на него – так что давайте начнем с этого.
Когда вы только начинаете поиски удовлетворения конкретной потребности в высокой скорости цилиндра; есть несколько вещей, которые необходимо изучить – и не только поверхностную концепцию увеличения емкости жидкости или сжатого воздуха; затем бросаем его в порты, чтобы посмотреть, что произойдет.
Однако, пытаясь ответить на этот вопрос для вашего конкретного приложения, мы предлагаем: выявить, взвесить и даже изучить следующие десять пунктов, имеющих отношение к вашему конкретному проекту и дизайну.
10 элементов, которые необходимо определить, взвесить и изучить, чтобы определить, насколько быстро ваш цилиндр может двигаться
1. Конечно, имеет значение, чтобы у вас был достаточный объем , появляющийся на порте цилиндра; так что наличие поставок – это одно
Конечно, имеет значение, чтобы у вас был достаточный объем , появляющийся на порте цилиндра; так что наличие поставок – это одно
2. Но тогда есть тонкая задача скорости жидкости и того, какого размера и / или сколько портов может потребоваться для транспортировки этого конкретного объема.
3. Затем необходимо уравновесить падение давления , которое можно допустить. В стандартной упаковке цилиндра NFPT внутреннее пространство на обоих концах несколько ограничено; поэтому разработчик цилиндра должен внимательно изучить как площади потока, так и изгибы и повороты жидкости, прежде чем прийти к эффективному представлению о том, что можно было бы назвать Cv (Kv, если вы думаете в метрической системе) для этот конкретный путь потока.
4. Если вы имеете дело с жидкостями, в расчет также входит вязкость. Что иногда не осознается полностью, так это то, что именно выходящая жидкость из противоположного порта, вероятно, будет более важной характеристикой, которую следует учитывать, когда речь идет о «скорости поршня / противодавлении»!
5. Уплотнения и подшипники очевидны ; и дизайн / материал, используемый для каждого отдельного компонента, будет иметь очень большое влияние на то, может ли быть достигнута ожидаемая скорость. Даже если требуемая скорость будет достигнута, необходимо также учесть ожидаемый срок службы продукта, прежде чем можно будет приветствовать успех
Уплотнения и подшипники очевидны ; и дизайн / материал, используемый для каждого отдельного компонента, будет иметь очень большое влияние на то, может ли быть достигнута ожидаемая скорость. Даже если требуемая скорость будет достигнута, необходимо также учесть ожидаемый срок службы продукта, прежде чем можно будет приветствовать успех
6.Быстро двигать поршень / шток цилиндра – это одно, но останавливаться – совсем другое дело! Во-первых, необходимо знать кривую скорости по всему ходу – или, по крайней мере, запрошенная скорость выражена как «пиковая» или «средняя величина общего хода».
8. Масса поршня и штока , вместе с тем, что прикреплено к «клиентской резьбе» , имеет большое значение для того, насколько быстро может быть ускорен узел, а также насколько быстро он может быть доведен до остановка или обратное направление движения.Большинству инженеров-конструкторов цилиндров, когда они сталкиваются с запросами на высокую скорость, нравится слышать, что процесс должен управляться сервоприводом или пропорциональным клапаном и что поршень будет реверсирован в пределах доступного хода, таким образом, никогда не ударяется о головку или колпачок.
9. Если нельзя полагаться на контроль жидкости, чтобы избежать удара поршня о головку или колпачок; тогда внешний механический упор может быть следующей немного лучшей новостью – но если это действительно надежный, мгновенный сценарий «удар камнем в твердое место», сценарий остановки; с поступающей жидкостью под давлением, все еще в полном потоке; тогда пиковое давление на высоких частотах может стать поводом для беспокойства.Конечно, есть факторы безопасности, заложенные в прочность всех компонентов, составляющих “ оболочку сосуда высокого давления ”, но было доказано бесчисленное количество раз, что чрезмерно высокие “ скачки ” давления могут быть слишком легко вызваны, казалось бы, самыми невиновен в конструкции системы.
10. Каждый случай потребует индивидуального внимания, и, несомненно, возникнут другие факторы , которые также необходимо учитывать – но многое возможно – поэтому всегда стоит спрашивать: «Сможем ли мы сделать это?»
Какой еще совет вы могли бы дать тем, кто задает подобные вопросы?
Изображение предоставлено: stockimages
ВВЕДЕНИЕ В СИСТЕМУ ГИДРАВЛИЧЕСКОГО ЦИЛИНДРА
Для каждого гидравлического приложения наиболее распространенным компонентом будет гидравлический цилиндр, который выдвигается и втягивается под действием жидкости под давлением. Гидравлический цилиндр позволяет безопасно и эффективно поднимать, тянуть и толкать тяжелые грузы. Гидравлический цилиндр, использующий поток жидкости под давлением, будет создавать механическую силу в линейном движении.
Гидравлический цилиндр позволяет безопасно и эффективно поднимать, тянуть и толкать тяжелые грузы. Гидравлический цилиндр, использующий поток жидкости под давлением, будет создавать механическую силу в линейном движении.
Ствол, поршень и шток поршня являются основными компонентами любого гидроцилиндра. Поршень, прикрепленный к штоку поршня, будет перемещаться вперед и назад через ствол за счет всасывания и удаления жидкости. Во время всасывания жидкости шток поршня выдвигается, а когда жидкость вытекает, шток поршня втягивается.Каждая операция означает, что шток поршня будет перемещаться через цилиндр при каждом включении гидравлической системы. Эта непрерывная работа под высоким давлением может повлиять на срок службы цилиндра из-за вибрации / ударов, возникающих из-за этого действия. Как решить эту проблему?
Вибрация / удар будут высокими, если шток поршня ударяет по цилиндру с большей скоростью. Контролируя давление жидкости, мы можем уменьшить ущерб в большей степени. Но одним из основных преимуществ гидравлики является скорость, и если давление жидкости снижается, чтобы контролировать скорость штока поршня, вся система будет двигаться к отказу, или требуемая производительность не будет достигнута. Амортизация гидроцилиндра – это метод, упомянутый в этой статье, для устранения повреждения гидроцилиндра.
Но одним из основных преимуществ гидравлики является скорость, и если давление жидкости снижается, чтобы контролировать скорость штока поршня, вся система будет двигаться к отказу, или требуемая производительность не будет достигнута. Амортизация гидроцилиндра – это метод, упомянутый в этой статье, для устранения повреждения гидроцилиндра.
Амортизация гидравлического цилиндра – это технология, которая замедляет поршень, когда он достигает конца своего хода.Это сравнительно недорогой метод, используемый как с пневматическими, так и с гидравлическими цилиндрами для уменьшения повреждений, вызванных ударными волнами, возникающими в результате скачков давления. Простой амортизирующий плунжер прикреплен к штоку поршня, и он будет действовать как дозирующее устройство, которое замедляет цилиндр, когда он достигает нескольких дюймов, прежде чем он ударяется о торцевую крышку. Это замедление происходит из-за ограничения потока жидкости, создаваемого плунжером. Основными преимуществами демпфирования гидроцилиндров являются:
Основными преимуществами демпфирования гидроцилиндров являются:
- Увеличивает срок службы цилиндра за счет снижения воздействия вибрации
- Снижает нежелательный шум
- В основном процесс замедления является автоматическим, регулируемым и требует меньшего обслуживания
- Обычно используется для перемещения тяжелых грузов или движения с высокой скоростью
Параметр, определяющий, требуется ли гидравлическое демпфирование, – это кинетическая энергия.Эта кинетическая энергия зависит от двух параметров: массы и скорости движения. Для расчета кинетической энергии используйте:
E = ½ * м * v2
Когда шток поршня цилиндра приближается к концу хода, с демпфированием кинетическая энергия преобразуется в:
E = Fa * ΔL
Здесь Fa – демпфирующая сила, которая создается при демпфирующем перемещении ΔL.
Как демпфирование гидравлического цилиндра замедляет цилиндр? Как уже упоминалось, цилиндр втягивается, когда жидкость выходит наружу и когда шток поршня приближается к торцевой крышке. В гидравлическом цилиндре с амортизатором плунжер амортизатора входит в полость амортизатора, когда приближается к торцевой крышке. Поток жидкости будет ограничен из-за этого действия, и возникнет противодавление, которое замедлит скорость цилиндра. На торцевой крышке расположено небольшое регулируемое отверстие, через которое эта жидкость может вытекать наружу, и это определяет степень демпфирования путем регулировки винта на торцевой крышке. Как правило, демпфирование цилиндра используется цилиндрами двустороннего действия, которые используются в тяжелых приложениях, таких как грузовые краны или портовые мобильные краны, и это может быть интегрировано с одной или обеих сторон цилиндра в зависимости от применения.
В гидравлическом цилиндре с амортизатором плунжер амортизатора входит в полость амортизатора, когда приближается к торцевой крышке. Поток жидкости будет ограничен из-за этого действия, и возникнет противодавление, которое замедлит скорость цилиндра. На торцевой крышке расположено небольшое регулируемое отверстие, через которое эта жидкость может вытекать наружу, и это определяет степень демпфирования путем регулировки винта на торцевой крышке. Как правило, демпфирование цилиндра используется цилиндрами двустороннего действия, которые используются в тяжелых приложениях, таких как грузовые краны или портовые мобильные краны, и это может быть интегрировано с одной или обеих сторон цилиндра в зависимости от применения.
Также читайте: Гидравлический цилиндр
Выполнение расчетов нагрузки – Журнал Fluid Power
Общие сведения о параметрах линейной нагрузки и движения
На рис. 1 показаны два цилиндра, используемые в гидравлической системе. Цилиндр 1 перемещает груз горизонтально, а цилиндр 2 поднимает груз вертикально. График зависимости давления от времени расширения обоих цилиндров показан на рис.2. Когда цилиндр 1 выдвигается для перемещения груза по горизонтали, кривая давления вначале резко возрастает по мере преодоления сил отрыва, эффекта статического трения (иногда называемого трением), и нагрузка начинает перемещаться. Дополнительной силой, которую следует учитывать, является сила ускорения. За кривой начального давления следует прямая горизонтальная линия, представляющая силу постоянного состояния, когда нагрузка передается на цилиндр 2. Горизонтальная линия давления возвращается к нулю, когда цилиндр 1 перестает выдвигаться.Когда цилиндр 2 начинает выдвигаться, напорная линия слегка поднимается, поскольку трения в цилиндре и сила ускорения преодолеваются. После этого напорная линия становится горизонтальной, оставаясь немного ниже начального уровня давления, когда цилиндр останавливается в конце хода, поскольку цилиндр все еще поддерживает нагрузку. На графике зависимости давления от времени на рис. 2 цилиндр 1 выдвигается под нагрузкой в течение 10 секунд, а цилиндр 2 выдвигается под нагрузкой в течение 5 секунд.
На графике зависимости давления от времени на рис. 2 цилиндр 1 выдвигается под нагрузкой в течение 10 секунд, а цилиндр 2 выдвигается под нагрузкой в течение 5 секунд.
Расчетный расчет хода выдвижения цилиндров показан на рис.1.
Шаг 1: Выберите давление в системе. Давление предохранительного клапана будет установлено на 2500 фунтов на квадратный дюйм.
Шаг 2: Подбирайте приводы для перемещения нагрузки при давлении, меньшем, чем давление в системе.
Трение – это сопротивление, с которым одна поверхность или объект сталкивается при движении относительно другой. Другими словами, это сопротивление движению, когда одна поверхность пытается скользить по другой. Это включает гидравлическую жидкость, скользящую по стенкам водопровода, вращающиеся группы насосов и двигателей, золотники и тарелки клапанов, а также поршни внутри цилиндров.Трение также является одним из факторов, которые перемещаются с помощью гидравлического оборудования. Есть диаграммы, которые показывают коэффициент трения для различных материалов. При вычислении силы, необходимой для перемещения объекта по поверхности, будет заданный коэффициент трения, который будет умножен на вес сукна перемещаемого объекта. Когда объект перемещается по уклону, вес объекта сукном будет ниже, чем фактический вес, в зависимости от угла наклона.
Есть диаграммы, которые показывают коэффициент трения для различных материалов. При вычислении силы, необходимой для перемещения объекта по поверхности, будет заданный коэффициент трения, который будет умножен на вес сукна перемещаемого объекта. Когда объект перемещается по уклону, вес объекта сукном будет ниже, чем фактический вес, в зависимости от угла наклона.
Вес нагрузки на цилиндр 1 составляет 10 000 фунтов.Коэффициент трения равен 0,4. Груз будет перемещен за 60 дюймов. Умножение веса объекта на коэффициент трения дает груз в 4000 фунтов, который необходимо переместить.
Чтобы поддерживать давление в цилиндре 1 ниже 2500 фунтов на квадратный дюйм, выбирается цилиндр с внутренним диаметром 2 дюйма. В этом примере предполагается, что штанга будет иметь достаточную жесткость (прочность колонны), так что прогиб или изгиб штанги не будут влиять на ход 60 дюймов.
Решите для давления в расширяющемся цилиндре, используя уравнение.2.1 и уравнение. 2,8:
Затем найдите давление, необходимое цилиндру 2 для балансировки нагрузки, используя цилиндр с внутренним диаметром 2,5 дюйма и ходом 48 дюймов.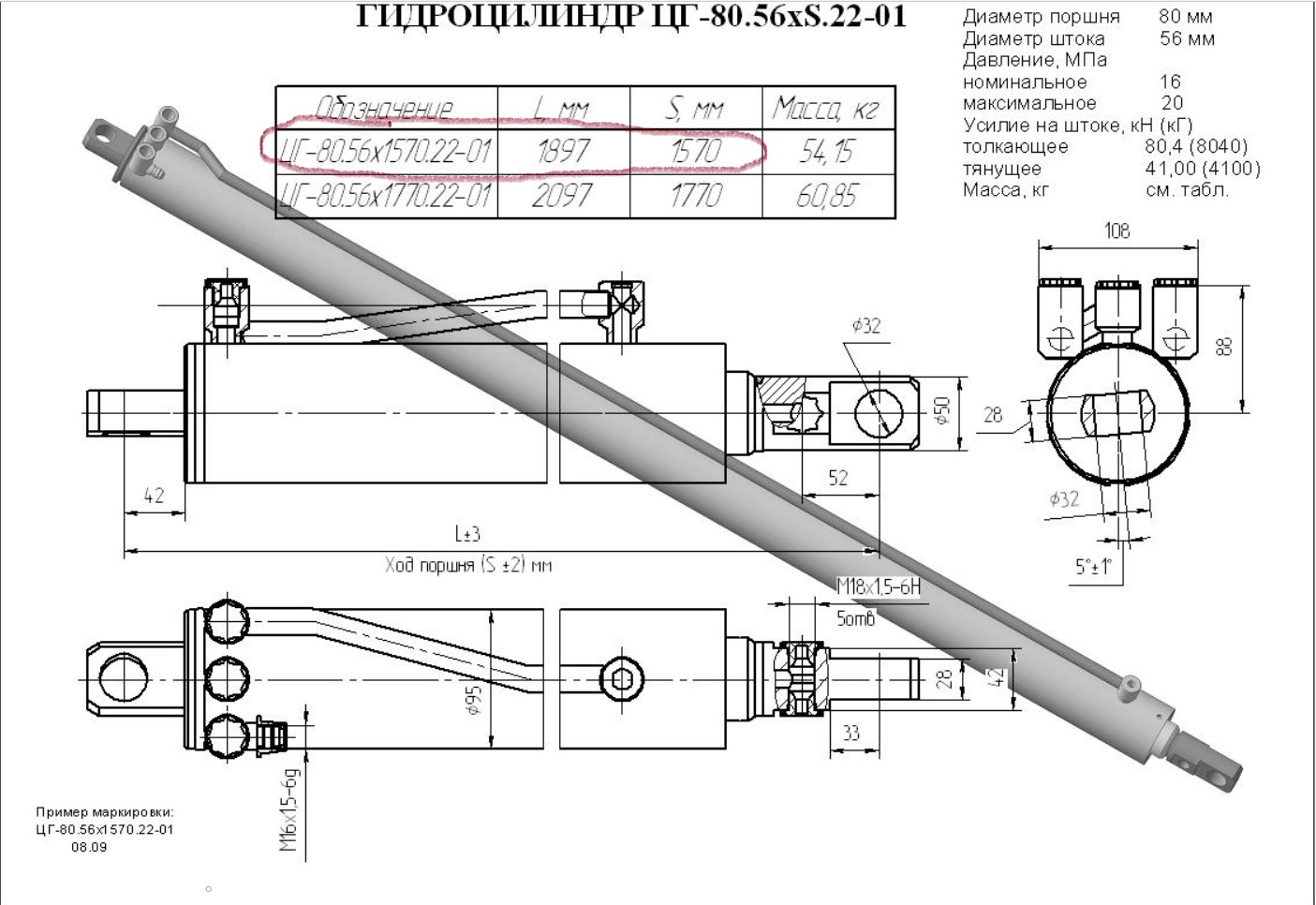 Опять же, предполагается, что цилиндр прикладывает только подъемную силу, а трение не играет роли. На практике добавляется запас, чтобы учесть системные потери, трение и силу ускорения. Поскольку эти факторы могут сильно различаться в зависимости от динамики системы, статическое давление, необходимое для балансировки нагрузки, должно использоваться в этих расчетах и при испытании.
Опять же, предполагается, что цилиндр прикладывает только подъемную силу, а трение не играет роли. На практике добавляется запас, чтобы учесть системные потери, трение и силу ускорения. Поскольку эти факторы могут сильно различаться в зависимости от динамики системы, статическое давление, необходимое для балансировки нагрузки, должно использоваться в этих расчетах и при испытании.
Настройка давления предохранительного клапана или компенсатора должна быть адаптирована к контуру, чтобы оно не было слишком близко к рабочему давлению, чтобы предотвратить нестабильность в системе.
Цилиндры с отверстиями меньшего диаметра можно было бы выбрать, не превышая 2500 фунтов на квадратный дюйм, но трение и инерция приведут к увеличению давления до более высоких уровней. Трение, которое необходимо преодолеть, вызвано несколькими факторами. Одним из факторов является механическое трение между динамическими уплотнениями цилиндра и стенками цилиндра и штоком.Кроме того, когда жидкость протекает через проводники для жидкости, давление будет падать в зависимости как от внутреннего трения жидкости, так и от трения между жидкостью и стенками проводников. По мере увеличения скорости жидкости и количества изгибов в проводниках падение давления увеличивается. Это падение давления является мерой гидравлического трения в системе. Хорошая конструкция системы стремится минимизировать этот перепад давления. Для этих расчетов и расчетов на экзамене потери из-за механического и жидкостного трения следует игнорировать, если они специально не включены в задачу.
По мере увеличения скорости жидкости и количества изгибов в проводниках падение давления увеличивается. Это падение давления является мерой гидравлического трения в системе. Хорошая конструкция системы стремится минимизировать этот перепад давления. Для этих расчетов и расчетов на экзамене потери из-за механического и жидкостного трения следует игнорировать, если они специально не включены в задачу.
Шаг 3. Постройте рабочий цикл, рассчитайте расход и размер компонентов.
Часть рабочего цикла, связанная с выдвижением цилиндра, показана на рис. 2. Перед расчетом расхода, необходимого для выдвижения цилиндра, необходимо рассчитать скорость цилиндра. Для цилиндра 1 решите уравнение 2.5 для этого значения:
Расчет расхода в цилиндре осуществляется с помощью 2-9 или 2-10:
Таким образом, насос должен подавать 4.90 галлонов в минуту в цилиндр 1 и 12,5 галлонов в минуту в цилиндр 2. Если бы часть цикла холостого хода была длиннее, чем рабочая часть цикла, насос с фиксированным рабочим объемом 13 галлонов в минуту был бы эффективен при большей скорости потока, но сбросил бы примерно половину его поток через предохранительный клапан при выдвижении цилиндра 1. Одним из способов решения этой проблемы было бы использование системы сдвоенного насоса с сегментами насоса 5 галлонов в минуту и 13 галлонов в минуту. Это было бы похоже на применение сегментов насоса рулевого управления и навесного оборудования, используемых на полевых тракторах.
Одним из способов решения этой проблемы было бы использование системы сдвоенного насоса с сегментами насоса 5 галлонов в минуту и 13 галлонов в минуту. Это было бы похоже на применение сегментов насоса рулевого управления и навесного оборудования, используемых на полевых тракторах.
На рис. 3 показана схема для двух цилиндров, в которой используется двойной насос с фиксированным рабочим объемом, два 4/3 (четырехходовых, трехпозиционных) гидрораспределителя с ручным управлением и уравновешивающий клапан для цилиндра 2 для предотвращения падения нагрузки.
Проверьте свои навыки
1. Какая будет скорость в метрах в секунду. цилиндра, перемещающегося на 1200 мм за 4 секунды?
а. 0,03 метра в секунду.
г. 0.30 метров в секунду.
г. 3,0 метра в секунду.
г. 30,0 метров в секунду.
e. 300,0 метров в секунду.
2. Насос, работающий при 1750 об / мин, используется для удлинения цилиндра диаметром 4 дюйма, штанги диаметром 2 дюйма и хода цилиндра 24 дюйма со средней скоростью 9 дюймов / сек. Каков теоретический рабочий объем насоса?
Каков теоретический рабочий объем насоса?
а. 0,62 дюйма3 / об.
г. 0,97 дюйма3 / об.
г. 1,23 дюйма3 / об.
г. 2,91 дюйм3 / об.
e. 3,88 дюйм3 / об.
Какое правильное решение?
Гидравлический привод, действующий в обоих направлениях
Описание
Блок гидроцилиндров двойного действия моделирует устройство, которое преобразует гидравлическая энергия в механическую энергию в форме поступательного движения.Гидравлическая жидкость закачка под давлением в одну из двух камер цилиндра заставляет поршень двигаться и приложить силу к штоку цилиндра. Цилиндры двустороннего действия передают силу и движение в обоих направления.
Соединения R и C механические поступательные
отверстия для консервации, соответствующие штоку цилиндра и зажимной конструкции цилиндра,
соответственно. Соединения A, и B гидравлические. сохранение портов.Порт A подключен к преобразователю A и порт B подключен к преобразователю B.
сохранение портов.Порт A подключен к преобразователю A и порт B подключен к преобразователю B.
Энергия через гидравлический канал A или B составляет направлен на соответствующий блок поступательного гидромеханического преобразователя. В преобразователь преобразует гидравлическую энергию в механическую и учитывает жидкость сжимаемость в камере цилиндра. Движение штанги ограничено механическим Трансляционный блокиратор Hard Stop таким образом, что штанга может двигаться только между крышками цилиндров.
Рабочий объем
Рабочий объем поршня измеряется как положение порта R относительно порта C . Ориентация цилиндра определяет направление смещения поршня. Смещение поршня нейтральное, или 0 , когда объем камеры A равен мертвому объему камеры.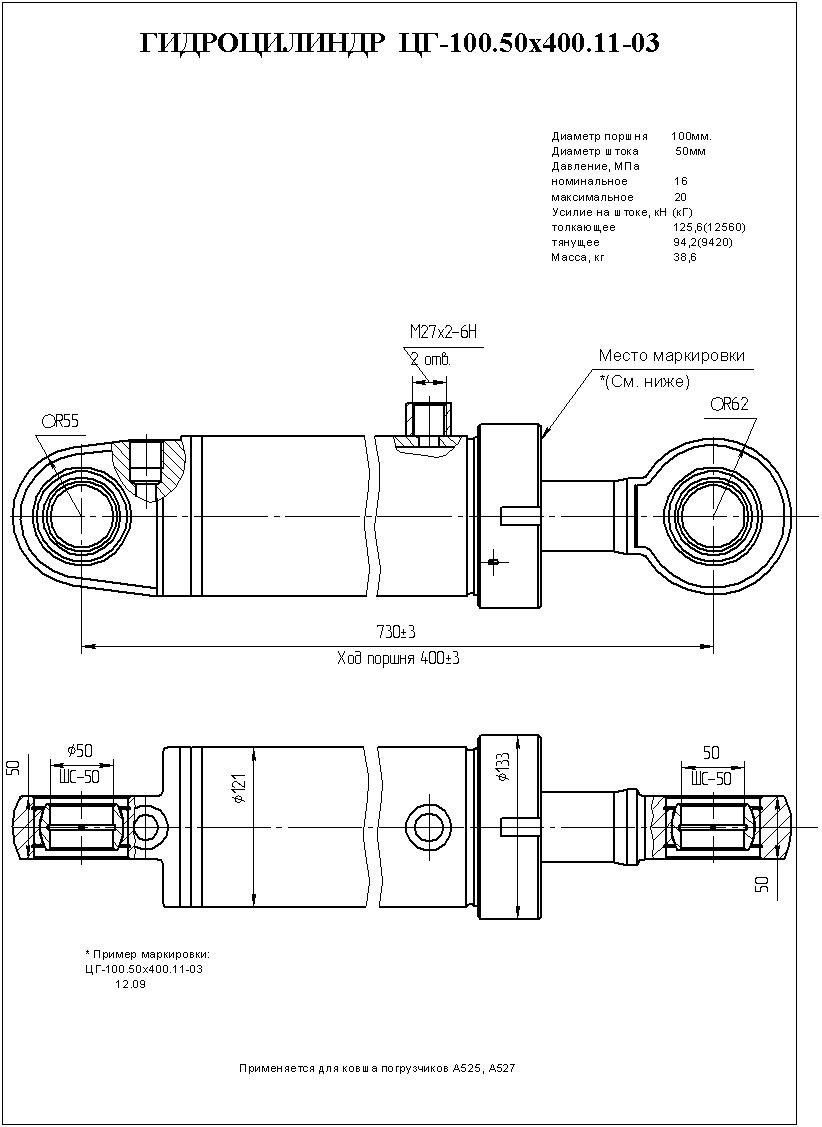 Когда
смещение получено в качестве входных данных, убедитесь, что производная положения равна
скорость поршня.Это происходит автоматически, когда входные данные принимаются от подключения блока трансляционного многотельного интерфейса к
Simscape Multibody сустав.
Когда
смещение получено в качестве входных данных, убедитесь, что производная положения равна
скорость поршня.Это происходит автоматически, когда входные данные принимаются от подключения блока трансляционного многотельного интерфейса к
Simscape Multibody сустав.
Составная конструкция
Модель цилиндра построена из блоков библиотеки Simscape ™ Foundation. Принципиальная схема модели показана ниже.
Примеры
Пример гидравлического цилиндра с гибкой опорой иллюстрирует моделирование цилиндр, зажим которого слишком гибкий, чтобы им можно было пренебречь.Соответствие конструкции представлен пружиной и демпфером, установленным между корпусом цилиндра и эталоном. точка. Цилиндр совершает прямой и обратный ход, нагружается по инерции, вязко трение и постоянная противодействующая нагрузка 400 Н.
Пример специального гидравлического цилиндра демонстрирует использование 4-ходового клапана.
Добавить комментарий