Санкт петербург гидромотор: Ошибка 404. Страница не найдена — Объявления на сайте Авито
Гидромоторы – каталог и цены
- Главная
- →
- Каталог
- →
- Гидромоторы
Что собой представляют гидромоторы?
Гидромоторы представляют собой гидравлические двигатели, имеющие предназначение – сообщение выходному звену движения на неограниченный угол поворота. Иными словами, они преобразуют гидравлическую энергию в механическую. Управление валом такого мотора производится за счет работы гидрораспределителя либо за счет средств регулирования гидропривода.
Большинство гидромоторов конструктивно мало отличаются от гидронасосов. Отличаются такие механизмы важной деталью: в гидромоторах на вход подаётся рабочая жидкость под давлением, а на выходе снимается с вала крутящий момент.
Типы гидравлических моторов
По конструктивным особенностям гидравлических двигателей выделяют следующие виды:
- Шестеренные гидромоторы. Работают за счет воздействия рабочей жидкости на шестерни, создавая при этом на валу крутящий момент.

- Героторные гидромоторы. Являются разновидностью шестеренных двигателей, отличаясь возможностью получения высоких крутящих моментов при малых габаритах. Получили широкое распространение в приводах тихоходных, но сильно нагруженных механизмов. Имеют недостатки: малые частоты вращения и невысокое max давление;
- Пластинчатые гидромоторы конструктивно аналогичны насосам, но при этом всегда снабжены механизмом прижима рабочих пластин.Гидродвигатели данного типа могут быть однократного и двукратного действия. Спрос на них объясняется низким уровнем шума, доступной стоимостью и их нетребовательностью к чистоте рабочей жидкости;
- Радиально-поршневые гидромоторы часто устанавливаются в механизмах для получения высоких моментов, могут быть однократного и многократного действия. Имеют сложную конструкцию, что объясняет высокую стоимость механизма;
- Аксиально-поршневые гидромоторы могут быть с наклонным блоком и с наклонным диском. Устанавливаются в приводах мобильных машин, станочных гидроприводах, прессах и способны работать на давлениях до 450 бар;
- Многотактные аксиально-поршневые гидромоторы весьма компактны, поэтому зачастую применяются в приводах мобильных машин и конвейеров, показывая при этом высокий показатель КПД;
- Линейные гидродвигатели (Гидроцилиндры) способны создавать только поступательные движения. Благодаря таким особенностям они находят свое применение в мобильной технике вмеханизмах автокранов, экскаваторов, манипуляторов и пр.

 Имеют сложную конструкцию, что объясняет высокую стоимость механизма;
Имеют сложную конструкцию, что объясняет высокую стоимость механизма; Преимущества гидромоторов
Преимуществами гидромоторов перед электродвигателями являются:
- значительно меньшие размеры и вес при равных мощностях;
- более широкий диапазон регулирования вращения;
- моментальные запуск и разгон; не чувствительны к частым включениям и выключениям, внезапным остановкам и реверсам;
- простое изменение закона движения вала за счет применения средств регулирования гидравлического привода.

Продажа гидравлических моторов в Санкт-Петербурге, области и по России
В данном разделе каталога представлен широкий ассортимент гидравлических моторов различных производителей, которые возможно приобрести оптом и в розницу. Для оптовых и постоянных покупателей у нас действует система скидок, о которой можно узнать по телефону в отделе продаж.
Ремонт гидромоторов в Санкт-Петербурге
Ремонт гидромотора в Санкт-Петербурге 26.07.2018 14:33Гидромотор – один из важных элементов гидравлической системы, применяемый как в спецтехнике, так и в конструктивных узлах коммерческого транспорта. Наиболее распространенный тип гидромотора – это всем знакомый гидроцилиндр.

Обращайтесь к специалистам для ремонта гидравлических машин – это позволит сэкономить на услугах и запчастях в долговременном аспекте. В большинстве случаев ремонт гидромотора будет сопряжен с заменой деталей, таких как поршень, подшипники или расходные материалы. От качества этих материалов напрямую зависит долговечность вашей техники. Мы давно работаем напрямую с лучшими поставщиками, что позволяет предлагать на комплектующие лучшие цены. Опыт наших специалистов позволяет оперативно произвести точную оценку стоимости работ.
В зависимости от конструкции трудоемкость и рентабельность ремонта гидромотора может варьироваться.
Существует немало конструктивных решений гидравлических двигателей, но наиболее распространены 4 типа:
1 шестерённые, получили распространение в силу простоты конструкции и, соответственно, низкой себестоимости. Используются в качестве гидропривода бульдозеров;
2 аксиально-плунжерные (аксиально-поршневые) плунжеры воздействуют на наклонный диск, который сообщает вращательное движение валу. Используются в качестве привода в экскаваторной технике, асфальтовых катках и т.д.;
Используются в качестве привода в экскаваторной технике, асфальтовых катках и т.д.;
3 радиально-плунжерные (радиально-поршневые) поршни или плунжеры направлены от центра гидродвигателя, так называемая «звездообразная» компоновка.;
4 Линейные (гидроцилиндры) – в свою очередь также делятся по принципу работы и конструктиву. Распространены как в КМУ, так и в других видах строительной и коммерческой техники.
БАОТракСервис осуществляет диагностику и ремонт гидравлических систем и гидродвигателей. Мы можем осуществлять диагностику и мелкий ремонт на выезде, для чего оборудован спецавтомобиль экстренной технической помощи. В спектр технических работ, производимых нами, входят следующие операции:
- Разборка-сборка;
- Дефектовка;
- Ремонт и замена регуляторов, клапанов и БУ;
- Замена элементов качающей группыремонт и замена валов;
- Замена подшипников;
- Замена прокладок, сальников и других РТИ;
- Замена рабочей жидкости;
- Испытательные работы.

Напоминаем, что мы работаем для Вас без обеда и выходных с 09:00 до 21:00
Ремонт гидроцилиндров.Ремонт пневмоцилиндров. Санкт-Петербург. Ремонт гидравлики
ПН — ПТ: c 9:00 до 17:00
г. Санкт-Петербург 8 (812) 948 79 66 / 8 (812) 956 67 77
1. Ремонт гидравлического оборудования спецтехники.
2. Ремонт гидроцилиндров, ремонт штока, как зарубежного, так и отечественного производства. Ремонт пневмоцилиндров.
3. Производство гидроцилиндров, изготовление гидроцилиндров по эскизам,чертежам, образцам или техзаданию.
4. Продажа гидроцилиндров.
5. Ремонт гидравлики коммунальной техники (мусоровозов, пылеуборочных машин, погрузчиков, бульдозеров, экскаваторов, тракторов и т. д. )
Опыт работы предприятия в сфере ремонта систем управления и оборудования спецмашин более десяти лет (в том числе ремонт спецтехники), а также производство гидроцилиндров и ремонт гидроцилиндров.
Требуется ремонт гидроцилиндров или спецтехники — приходите к нам!
Производство гидростанций изготовление гидростанций по техническим параметрам заказчика
РЕМОНТ ГИДРОЦИЛИНДРОВ РЕМОНТ ГИДРАВЛИКИ РЕМОНТ ШТОКОВ РЕМОНТ СТАНКОВ РЕМОНТ ГИДРОПРЕССОВ ИЗГОТОВЛЕНИЕ ГИДРОЦИЛИНДРОВ ИЗГОТОВЛЕНИЕ ГИДРОСТАНЦИЙ ТОКАРНЫЕ РАБОТЫ 8 (812) 948 79 66 8 (812) 956 67 77
Гидроцилиндр
Один из ключевых элементов гидравлической системы, неисправен гидроцилиндр, работа всего механизма невозможна. Следовательно выход из строя гидроцилиндра означает потерю производительности труда и эффективности использования всего механизма.
Гидроцилиндр это гидродвигатель, преобразующий энергию потока рабочей жидкости в механическую, предназначенный для передачи возвратно- поступательного движения исполнительным механизмам.
Гидрораспределитель – механизм управления гидроцилиндром, гидрораспределители бывают с ручным управлением, электромеханическим, гидравлическим.
Перенаправляя потоки рабочей жидкости в поршневую и штоковую полость, осуществляется управление движением, поршня.
Типы гидроцилиндров:
Одностороннего действия
Рабочая жидкость подается только в одну полость, возврат в исходное положение как правило пружинный. Бывают двух типов – поршневые гидроцилиндры и плунжерные. В плунжерных гидроцилиндрах роль поршня выполняет шток гидроцилиндра.
Двустороннего действия
Подача рабочей жидкости возможна в обе полости гидроцилиндра как в поршневую так и в штоковую полость цилиндра. Такие цилиндры имеют два типа усилия – тянущее и толкающее, тянущее усилие значительно меньше. Разница площади поршня вот в чем причина дисбаланса. При давление в системе 10 МПа поршень площадью 100 кв.см., дает толкающие усилие на штоке – 10000 кг., а вот поршень площалью 50 кв.см. всего -5000 кг. Усилие гидроцилиндра рассчитывается по формуле – площадь поршня умноженная на давление. Бывают только поршневого типа.
Телескопические гидроцилиндры
При необходимости уменьшить габарит цилиндра увеличив при этом рабочий ход применяются гидроцилиндры телескопического типа.
Ремонт гидроцилиндров это не только замена поршневых и штоковых уплотнений.
Ремонт гидроцилиндров в некоторых случаях требует замены штока или гильзы гидроцилиндра, ремонта или замены поршня, ремонта или замены проушин.
Наша организация занимается ремонтом и производством гидроцилиндров.
Ремонт поршневых гидроцилиндров
Ремонт плунжерных гидроцилиндров
Ремонт телескопических цилиндров
Ремонт телескопических гидроцилиндров
Ремонт штока гидроцилиндра
Замена штока гидроцилиндра
Ремонт поршня гидроцилиндра
Замена уплотнений гидроцилиндра
Замена гильзы гидроцилиндра
Ремонт гидроцилиндров экскаватора
Ремонт гидроцилиндров дорожно-строительной и коммунальной техники
Ремонт гидроцилиндров сельскохозяйственной техники
Ремонт гидроцилиндров бульдозера
Ремонт гидроцилиндров подъема кабины
Ремонт гидролифта
Ремонт гидроцилиндров погрузчика
Качественный ремонт гидроцилиндра
Ремонт гидроцилиндра это не только замена изношенных или поврежденных частей.
Качественный ремонт это проверка гидроцилиндра на стенде после сборки.
Наша организация осуществляет качественный ремонт цилиндров.
Пневмоцилиндры, исполнительные механизмы предназначены для преобразования энергии сжатого воздуха в возвратно-поступательные движения. По исполнению бывают двухстороннего действия, одностороннего действия с пружинным возвратом и без, поворотного типа, комбинированные, специального исполнения и другие. Рабочее давление воздуха до 1 МПа, очистка не грубее 10 класса. Создают толкающее, тянущее, поворотное или комбинированное усилие. Для эксплуатации пневмоцилиндра необходим пневмопривод, система подготовки воздуха, контрольно-регулирующая и распределительная аппаратура, трубопровод и соединения и крепления пневмоцилиндра. Варианты монтажа – лапа, фланец, проушина, вилка, цапфа резьбовая, цапфа крышки, проушина шарнирная, опора цапф, шарнирная головка,
муфта-компенсатор.
ГАРАНТИЯ ДВЕНАДЦАТЬ МЕСЯЦЕВ
О компании
г. Санкт-Петербург 8 (812) 948 79 66 / 8 (812) 956 67 77
Санкт-Петербург 8 (812) 948 79 66 / 8 (812) 956 67 77
1. Ремонт гидравлического оборудования спецтехники.
2. Ремонт гидроцилиндров, ремонт штока, как зарубежного, так и отечественного производства.
3. Производство гидроцилиндров, изготовление гидроцилиндров по эскизам,чертежам, образцам или техзаданию.
4. Продажа гидроцилиндров.
5. Ремонт гидравлики коммунальной техники (мусоровозов, пылеуборочных машин, погрузчиков, бульдозеров, экскаваторов, тракторов и т. д. )
Опыт работы предприятия в сфере ремонта систем управления и оборудования спецмашин более десяти лет (в том числе ремонт спецтехники), а также производство гидроцилиндров и ремонт гидроцилиндров.
Требуется ремонт гидроцилиндров или спецтехники — приходите к нам!
Производство гидростанций изготовление гидростанций по техническим параметрам заказчика
Даление до 330 атм, производительность от 3-100 л/мин, бак — от 10 литров импортные комплектующие
РЕМОНТ ГИДРОЦИЛИНДРОВ РЕМОНТ ГИДРАВЛИКИ РЕМОНТ ШТОКОВ РЕМОНТ СТАНКОВ РЕМОНТ ГИДРОПРЕССОВ ИЗГОТОВЛЕНИЕ ГИДРОЦИЛИНДРОВ ИЗГОТОВЛЕНИЕ ГИДРОСТАНЦИЙ ТОКАРНЫЕ РАБОТЫ 8 (812) 948 79 66 8 (812) 956 67 77 Юрий Григорьевич Дикий
Услуги
- Полная диагностика
– Ремонт гидроцилиндров
– Ремонт гидоцилиндров подъема кузова
– Ремонт гидроцилиндров подъема кабины
– Ремонт насоса подъема кабины
– Токарные работы
– Фрезерные работы
– Изготовление гидроцилиндров
– Производство гидроцилиндров
– Ремонт гидравлики
– Ремонт пневмоцилиндров
– Изготовление пневмоцилиндров
– Изготовление гидростанций
– Ремонт гидростанций
– Ремонт креплений
– Изготовление креплений
(PDF) Аксиально-поршневой гидромотор с повышенным диапазоном регулирования
1458 Владимир Осипов и др. / Procedure Engineering 100 (2015) 1455 – 1458
/ Procedure Engineering 100 (2015) 1455 – 1458
Испытания прототипа гидромотора показали следующие предварительные результаты. Перепад давления в линиях
, при котором происходит отрыв гидромотора на холостом ходу, не превышает 0,005 МПа, что свидетельствует о малых потерях
в парах трения. Минимальная частота вращения гидромотора при номинальном давлении 30 МПа не превышала 0,1 с
-1
.
Номинальная частота вращения
при номинальной нагрузке составляла 210 с
-1
, что обеспечивает диапазон регулирования около 2000. Механический
КПД гидравлического двигателя при номинальном давлении был не ниже 0,97.
Заключение
Анализ гидростатических приводов на базе аксиально-поршневых гидравлических машин показал, что диапазон их регулирования может быть
,
увеличен
за счет уменьшения минимальной частоты вращения вала гидромотора.Проектное решение задачи
w
, как представлено в
в этой статье.
Основная идея разработки конструкции аксиально-поршневого двухагрегатного гидромотора заключалась в обеспечении гидростатической нагрузки
и
поршневой муфты
-цилиндра. Особое внимание было уделено воздуховоду pro
и испытаниям прототипа гидравлического двигателя
. Прототип обеспечивает следующие результаты:
‚A
минимальная частота вращения при номинальной нагрузке не более 0,1 с
-1
‚
Диапазон регулирования 2000
‚
Высокая механическая эффективность при номинальной нагрузке при работе на низкой частоте вращения
Следующим логическим шагом будет испытание на долговечность прототипа аксиально-поршневого двухагрегатного гидромотора.
Литература
[1] Бабаев О.М., Игнатов Л.Н., Кисточкин Ю.С., Цветков В.А., Гидромеханические силовые передачи, Машиностроение, Санкт-
Петербург, Россия, 2000.
[2] Круглов В.Ю., Новоселов Б.В., Шорохов А.И., Валиков П. И., Применение аксиально-поршневых гидравлических машин с наклонным диском в ведомых приводах,
И., Применение аксиально-поршневых гидравлических машин с наклонным диском в ведомых приводах,
И
Звезда Тульского государственного университета. Технические науки, 2012,
№1, с. 20-25.
[3] Ларчиков, И., Юров А., Стажков С., Григорьева А., Процук А. Энергетические исследования аксиально-поршневой гидравлической машины по
wer
-intensive
гидроприводная система. 2014, с. 512
-517.
[4] Михайлов, М., Стажков, С., Цветков, В., Анализ возмущающих воздействий на входное звено привода постоянной скорости, Анналы DAAAM за
2012 г. и материалы 23-го международного симпозиума DAAAM
, Каталинич, Б.(Ред.), Том 23, №1, 2012, стр. 449-452
[5
] Ни, С.Л., Хуанг, Г.Х., Ли, Ю.П., Трибологические исследования гидростатического скользящего подшипника с демпфером с кольцевым отверстием для гидравлической гидравлики осевой
pis
-тонный двигатель, Tribology International
, том 39, выпуск 11, ноябрь 2006 г. , стр. 1342-1354.
, стр. 1342-1354.
[6
] Патент Германии №2459526, F 03 C1 / 24, 1976.
[7
]
Соколов Г.С., Кисточкин Ю.С., Осипов В.И., Цветков В.А., Окунь И.М., Хорохорин М.А., Маранцев М.А. Аксиально-поршневой
hy
dromachine. Авторское свидетельство №1731981 (выдано 07.05.1992 журнал №17).
Анализ производительности гидравлических систем с регулируемой скоростью и большой мощностью при параллельном управлении структурой клапан-насос
1. Введение
Гидравлическая система с регулируемой скоростью – это новый вид общей энергосберегающей системы, в которой обычно используется насос с регулируемой скоростью, насос с фиксированным рабочим объемом, приводимый в действие электродвигателем с регулируемой скоростью, а управление скоростью вращения электродвигателя регулирует нагнетание. расход насоса и изменяет мощность исполнительных механизмов.По сравнению с традиционными гидравлическими системами с регулируемым рабочим объемом, в которых используется форма электродвигателя с постоянной скоростью, приводящего в движение насос переменного рабочего объема [1-3], гидравлические системы с регулируемой скоростью имеют много преимуществ, таких как более высокая надежность, более широкий диапазон регулирования скорости, лучшая энергия экономия и меньшая стоимость [4-6].
Однако гидравлические системы с регулируемой скоростью по-прежнему обладают некоторыми недостатками. (1) Плохие низкоскоростные характеристики при сильном ударе давления. Гидравлические насосы не могут работать ниже минимальной стабильной скорости, иначе это вызовет сильные колебания потока и давления; кроме того, электродвигатель также не может обеспечивать достаточный крутящий момент для управления насосом при сравнительно низкой частоте, особенно при запуске и останове.(2) Медленный ответ. Продолжительность ускорения и замедления электродвигателя относительно велики из-за ограничения перегрузочной способности инвертора и большой инерции электродвигателя и насоса, что приводит к медленной реакции.
Для устранения вышеуказанных недостатков, обычно к насосу с регулируемой скоростью последовательно подключают проточный клапан, чтобы сформировать гидравлическую систему с регулируемой скоростью последовательно с клапаном и насосом [7-8]. В системе такого типа на ступени низкой скорости и ступени замедления клапан управляет потоком в системе, чтобы улучшить характеристики на низкой скорости и реакцию на замедление; на других этапах клапан открывается полностью, и система управляется насосом. Однако эта составная система медленно реагирует на стадии ускорения из-за отсутствия достаточного потока. Для решения этой проблемы в вышеуказанную систему добавлено устройство регулирования энергии, которое образует гидравлическую систему регулирования скорости вращения с регулируемой скоростью [8-10]. Устройство регулирования энергии может поглощать избыточную масляную жидкость во время периода замедления и выпускать поток масла во время периода ускорения. Однако указанные выше системы с последовательным соединением «клапан-насос» не подходят для больших энергосистем, поскольку клапан потока, последовательно подключенный к главному контуру системы, ограничивает максимальный поток системы.
Однако эта составная система медленно реагирует на стадии ускорения из-за отсутствия достаточного потока. Для решения этой проблемы в вышеуказанную систему добавлено устройство регулирования энергии, которое образует гидравлическую систему регулирования скорости вращения с регулируемой скоростью [8-10]. Устройство регулирования энергии может поглощать избыточную масляную жидкость во время периода замедления и выпускать поток масла во время периода ускорения. Однако указанные выше системы с последовательным соединением «клапан-насос» не подходят для больших энергосистем, поскольку клапан потока, последовательно подключенный к главному контуру системы, ограничивает максимальный поток системы.
Системы параллельного гидравлического управления клапан-насос являются предпочтительными системами большой мощности, в которых проточный клапан подключен к насосу параллельно. Пока что параллельное управление клапан-насос в основном ориентировано на электрогидравлические приводы истребителей [11-13]. В вышеупомянутых системах параллельного управления как клапан, так и насос переменной скорости подают поток к приводу, и общий поток системы является суммой потока клапана и потока насоса, поэтому параллельное управление клапан-насос может только улучшить характеристики отклика системы, но делает Проблема низкоскоростной производительности хуже [14].
В вышеупомянутых системах параллельного управления как клапан, так и насос переменной скорости подают поток к приводу, и общий поток системы является суммой потока клапана и потока насоса, поэтому параллельное управление клапан-насос может только улучшить характеристики отклика системы, но делает Проблема низкоскоростной производительности хуже [14].
Мы представляем новый тип гидравлической системы с регулируемой скоростью в системе управления с параллельной регулируемой структурой «клапан-насос», где клапан потока параллелен насосу с регулируемой скоростью и может работать при утечке и состоянии пополнения, а его структура управления может изменяться в зависимости от требований управления. в процессе регулирования. В этой статье сначала разрабатывается предлагаемая система, а затем строится ее математическая модель, а в конце анализируются динамические характеристики путем моделирования на платформе AMESim.
2.Системное проектирование
2.1. Принцип действия
Принципиальная схема гидравлической системы с регулируемой скоростью при параллельном управлении структурой «клапан-насос» показана на рис. 1, который представляет собой систему с открытым циклом. Насос постоянного рабочего объема приводится в действие двигателем с регулируемой частотой, и регулировка выходной частоты инвертора будет изменять скорость насоса, а затем регулировать поток на выходе насоса. Сервопропорциональный направляющий клапан (SPDV) соединен с передней камерой параллельно для управления двигателем. гидромотор с насосом переменной скорости.Электромагнитный распределитель используется для изменения направления вращения гидравлического двигателя. Система нагружается загрузочным насосом, а давление нагрузки регулируется пропорциональным предохранительным клапаном. Скорость гидравлического двигателя измеряется и передается обратно в контроллер через энкодер, затем сравнивается с опорным сигналом, и ошибка исправляется, и контроллер выдает два управляющих сигнала, один для инвертора для изменения скорости электродвигателя, а другой – СПДВ контролировать его открытие.
1, который представляет собой систему с открытым циклом. Насос постоянного рабочего объема приводится в действие двигателем с регулируемой частотой, и регулировка выходной частоты инвертора будет изменять скорость насоса, а затем регулировать поток на выходе насоса. Сервопропорциональный направляющий клапан (SPDV) соединен с передней камерой параллельно для управления двигателем. гидромотор с насосом переменной скорости.Электромагнитный распределитель используется для изменения направления вращения гидравлического двигателя. Система нагружается загрузочным насосом, а давление нагрузки регулируется пропорциональным предохранительным клапаном. Скорость гидравлического двигателя измеряется и передается обратно в контроллер через энкодер, затем сравнивается с опорным сигналом, и ошибка исправляется, и контроллер выдает два управляющих сигнала, один для инвертора для изменения скорости электродвигателя, а другой – СПДВ контролировать его открытие.
Рис. 1. Принципиальная схема предлагаемой системы. 1 – инвертор; 2 – Частотно-регулируемый двигатель; 3 – Насос постоянного вытеснения; 4 – СПДВ; 5 – Электромагнитный гидрораспределитель; 6 – Гидромотор; 7 – инерция; 8 – Энкодер; 9 – Загрузочный насос; 10 – Пропорциональный предохранительный клапан; 11 – Система загрузки; 12 – Источник масла СПДВ
Принципиальная схема предлагаемой системы. 1 – инвертор; 2 – Частотно-регулируемый двигатель; 3 – Насос постоянного вытеснения; 4 – СПДВ; 5 – Электромагнитный гидрораспределитель; 6 – Гидромотор; 7 – инерция; 8 – Энкодер; 9 – Загрузочный насос; 10 – Пропорциональный предохранительный клапан; 11 – Система загрузки; 12 – Источник масла СПДВ
На рис. 2 показан принцип действия в рабочем круге.
1) На этапах пуска и останова с низкой скоростью система находится в режиме управления параллельным клапаном на утечку (LPVC).На начальном этапе насос работает с начальной скоростью, которая выше его минимальной стабильной скорости, и нагнетает определенное количество потока, а SPDV с предварительным открытием в самом начале все время получает отрицательные токи, что делает B порт соединяется с портом Т (масляным баком), образуя перепускной канал утечки для улучшения низкоскоростных характеристик гидравлического двигателя. Скорость гидравлического двигателя увеличивается с уменьшением открытия SPDV, а затем достигает стабильной скорости, когда SPDV полностью закрыт.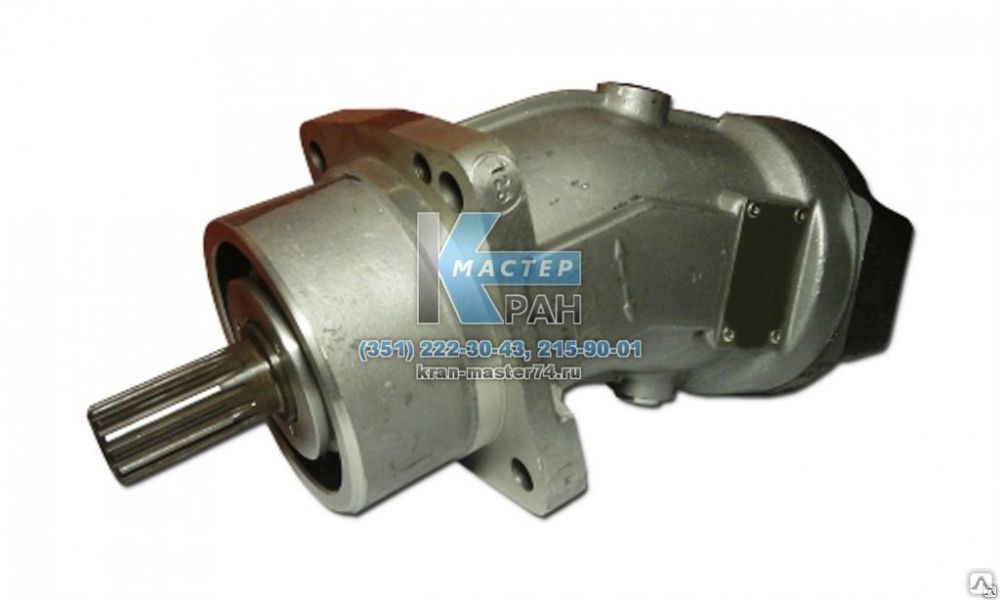 На стадии остановки СПДВ идет наоборот.
На стадии остановки СПДВ идет наоборот.
2) На стадиях ускорения и замедления система находится в режиме управления насосом с переменной скоростью (VSPC), и скорость гидравлического двигателя зависит от скорости насоса, которая выше начальной скорости.
3) На равномерной стадии с высокой скоростью система находится в режиме управления параллельным клапаном пополнения (RPVC). На этом этапе насос с фиксированной скоростью нагнетает определенный поток жидкости, который меньше потока, необходимого для требуемой скорости гидравлического двигателя, и SPDV все время получает положительные токи, а порт P соединяется с портом B для компенсации жидкости. передняя камера для улучшения реакции на изменение нагрузки.
Рис. 2. Процесс регулирования скорости в рабочем круге. 1 – Старт; 2 – Разгон; 3 – Униформа; 4 – замедление; 5 – Стоп
Таким образом, здесь «переменная структура» означает, что структура (режим) управления системой изменяется в зависимости от требований к управлению на разных ступенях регулирования, что позволяет максимально использовать преимущества управления насосом с переменной скоростью и управления клапанами для достижения комплексных характеристик, таких как работа на низкой скорости. , быстрое реагирование на изменение нагрузки, а также высокий КПД.
, быстрое реагирование на изменение нагрузки, а также высокий КПД.
(Примечание: для улучшения читаемости управление насосом с переменной скоростью, управление параллельным клапаном утечки и управление параллельным клапаном пополнения в следующей статье для краткости именуются, соответственно, как управление насосом, управление утечкой и управление пополнением).
2.2. Конфигурация системы
Ключевые компоненты выбираются в соответствии с указанным выше принципом, как показано в Таблице 1. Инвертор – это векторный инвертор, а насос – это насос фиксированного рабочего объема с изогнутой осью, с малым рабочим объемом и высокой скоростью, его минимальная стабильная скорость составляет 500 об / мин. мин.Гидравлический двигатель внутреннего изогнутого типа с большим рабочим объемом и низкой скоростью, его максимальная скорость составляет 90 об / мин. Загрузочный насос имеет те же параметры, что и гидравлический двигатель. Номинальный расход SPDV выбран равным 9 л / мин в соответствии с 6 л / мин, соответствующими минимальной стабильной скорости насоса.
Таблица 1. Параметры ключевых компонентов
Компоненты | Спецификация | Компоненты | Спецификация |
Электродвигатель | мощность: 7.5 кВт; номинальная частота вращения: 3000 об / мин | Инвертор | мощность: 11 кВт с векторным управлением; частотный диапазон: 0,1-400 Гц |
СПДВ | расход: 9 л / мин при 1,5 МПа на ступеньку; максимальный ток: 40 мА; частота: 60 Гц; Коэффициент демпфирования: 0. | Гидравлический двигатель и загрузочный насос | диапазон скоростей: 0-90 об / мин; смещение: 468 мл / об; номинальное давление: 40 МПа |
Насос | смещение: 12 мл / об; Диапазон скоростей: 500-3000 об / мин | Пропорциональный предохранительный клапан | диапазон давления: 0.7-31,5 МПа; скорость потока: 200 л / мин |
Инерция | 70 г 2 |
 7
73.
 Математическое моделирование
Математическое моделирование3.1. Тяга регулируемого насоса
Поскольку динамика изобретения достаточно быстра, чтобы ею можно было пренебречь, предполагается, что инвертор является пропорциональным элементом, то есть:
где ku – коэффициент усиления инвертора, up – входное напряжение инвертора, f – выходная частота инвертора.
Электромагнитный момент электродвигателя составляет:
, где U = kff, – фазное напряжение статора, а kf = 4,4 – коэффициент усиления от частоты к напряжению, kT1 = 3N2πRkf = 4,82, kT2 = 3N24π2Rkf2 = 3,36, а N = 1 – количество пар полюсов, R = 0,436 Ом. – сопротивление стороны ротора относительно статора, wp – фактическая угловая скорость электродвигателя.
Уравнение баланса крутящего момента:
, где TP = PLDp – момент нагрузки, PL – давление в системе (фактически, давление на выходе насоса), Dp – рабочий объем насоса, JP – полная инерция относительно вала двигателя, примерно равная 0. 2 кг / м 2 , BP – общий коэффициент вязкого демпфирования, около 0,01 Нм / рад.
2 кг / м 2 , BP – общий коэффициент вязкого демпфирования, около 0,01 Нм / рад.
Ур. (1) – (3) можно объединить и преобразовать Лапласа, чтобы получить:
(4)
wp = Kv2up-Kv1PLs / ωbp + 1,, где Kv2 = kukfkT1kT2 + Bp, Kv1 = DpkT2 + Bp, ωbp = kT2 + BpJp, а фактическая частота вращения электродвигателя np = 60wp / (2π). Эта передаточная функция указывает, что инвертор-двигатель является инерционным элементом первого порядка, и скорость электродвигателя увеличивается с увеличением входного напряжения и уменьшением давления PL в системе.Следовательно, фактический расход насоса переменной скорости составляет:
, где Qp0 = Dpwp – расход без нагрузки насоса с регулируемой скоростью, а Ctp – общий коэффициент утечки насоса.
3.2. Тяга управления клапаном
В режиме контроля утечки байпасный клапан SPDV работает в режиме утечки, и его уравнение потока определяется следующим образом:
(6)
Ql = Ql0 + KclPL, Ql0 = KvlIls2ωsv2 + 2ξsvωsvs + 1, Kvl = CsvPL, Kcl = CsvIl2PL,, где Il – входной ток SPDV в состоянии утечки, Csv – константа SPDV, wsv и ξsv – собственная гидравлическая частота и коэффициент демпфирования SPDV, соответственно, Ql и Ql0 – фактический поток SPDV в состоянии утечки, соответственно, Kvl и Kcl – коэффициент увеличения потока и коэффициент давления потока SPDV при негерметичном состоянии, соответственно.
В режиме управления пополнением SPDV работает в режиме пополнения, и его уравнение потока определяется следующим образом:
(7)
Qr = Qr0 + KcrPL, Qr0 = KvrIrs2ωsv2 + 2ξsvωsvs + 1, Kvr = CsvPs-PL, Kcr = CsvIr2Ps-PL,, где Ir – входной ток SPDV в состоянии пополнения, Qr и Qr0 – фактический расход и поток разгрузки SPDV в состоянии пополнения, соответственно, Kvr и Kcr – коэффициент увеличения расхода и коэффициент расход-давление SPDV в состоянии пополнения, соответственно.
3.3. Тяга гидромотора
В режиме контроля утечки полное уравнение целостности системы составляет:
(8)
Qp-Ql = CmPL + Dmwm + V0sPL / βe.В режиме управления пополнением полное уравнение целостности системы составляет:
(9)
Qp-Qr = CmPL + Dmwm + V0sPL / βe, где Cm – коэффициент утечки гидромотора, wm – угловая скорость гидромотора, Dm – рабочий объем гидромотора, V0 – средний объем передней камеры.
Уравнение баланса крутящего момента гидравлического двигателя:
, где J – полная инерция относительно вала гидравлического двигателя, Bm – коэффициент критического демпфирования. TL = DLPL – момент нагрузки, создаваемый загрузочным насосом без учета давления в возвратной камере, а DL = Dm – рабочий объем загрузочного насоса.
Combing Eqs. (5), (6), (8) и (10) динамическое уравнение разомкнутого контура предлагаемой системы в условиях утечки:
(11)
wm = Qp0-Ql0Dm-ClDm21 + s2ωlξlTLs2ωl2 + 2ξlωls + 1,где Cl = Cp + Cm + Kcl, ωl = βeDm2V0J, ξl = Cl2Dm βeJV0.Cl – общий коэффициент утечки предлагаемой системы в режиме управления на утечку, wl и ξl – собственная частота и коэффициент демпфирования предлагаемой системы в режиме управления на утечку, соответственно.
Combing Eqs. (5), (7), (8) и (9) динамическое уравнение разомкнутого контура предлагаемой системы в режиме управления пополнением составляет:
(12)
wm = Qp0-Qr0Dm-CrDm21 + s2ωrξrTLs2ωr2 + 2ξlωrs + 1, где Cr = Cp + Cm + Kcr, ωr = βeDm2V0J, ξr = Cr2Dm βeJV0. Cr – общий коэффициент утечки предлагаемой системы в режиме пополнения, ωr и ξr – собственная частота и коэффициент демпфирования предлагаемой системы в режиме пополнения, соответственно.
Cr – общий коэффициент утечки предлагаемой системы в режиме пополнения, ωr и ξr – собственная частота и коэффициент демпфирования предлагаемой системы в режиме пополнения, соответственно.
Параллельное управление клапаном и насосом переключится на управление только насосом, когда SPDV закрыт, и Ql0, Qro, Kcl и Kcr будут равны нулю в уравнениях. (11), (12), поэтому динамическое уравнение разомкнутого контура предлагаемой системы в режиме управления насосом имеет вид [15-16]:
(13)
wm = Qp0Dm-CtDm21 + s2ωmξmTLs2ωm2 + 2ξmωms + 1,где Ct = Cp + Cm = Qpm2PL, ωm = βeDm2V0J, ξm = Ct2Dm βeJV0. Qpm – общий поток утечки насоса и двигателя, Ct – общий коэффициент утечки предложенной системы в режиме управления насосом, ωm и ξm – собственная частота гидравлики и коэффициент демпфирования предлагаемой системы в режиме управления насосом, соответственно.
Отметим, что уравнения. (11) – (13) аналогичны, поэтому режим управления насосом можно рассматривать как частный случай режима параллельного управления клапан-насос.
Энкодер реагирует быстро и может рассматриваться как пропорциональный элемент:
, где Km – коэффициент усиления обратной связи, um – напряжение обратной связи энкодера, а nm = 60wm / (2π) – частота вращения двигателя.
3.4. Математическая модель общей системы
На рис. 3 показана блок-схема управления предлагаемой системой, которая состоит из звена управления клапаном, звена регулируемого насоса и звена гидравлического двигателя.Система управления может работать в режиме управления параллельным клапаном пополнения и режиме управления параллельным клапаном с утечкой, когда SPDV работает в состоянии утечки и состоянии пополнения, соответственно. Параметры системы перечислены в таблице 2.
Таблица 2. Параметры общей системы
Символ | Значение | Блок | Символ | Значение | Блок |
V0 | 1. | м 3 | ωbp | 16,7 | рад / с |
J | 70 | кг · м 2 | ωsv | 314 | рад / с |
Дм | 7.45 × 10 -5 | м 3 / рад | ξsv | 0,7 | |
Кт | 2,94 × 10 – 12 | м 3 / (с · Па) | ωm | 10. | рад / с |
Км | 1/6 | В · мин / об | ξm | 0,19 | |
Квл или Квр | 0.58 | м 3 / (с · мВ) | ωl или ωr | 10,48 | рад / с |
C1 или Cr | ≥2. | м 3 / (с · Па) | ξl или ξr | ≥0,19 | |
K1 | 2,14 | K2 | 3.10 | ||
K3 | 3,10 |
 0 × 10 -3
0 × 10 -3  48
48 94 × 10 -12
94 × 10 -12 Рис. 3. Блок-схема предлагаемой системы. Нижний индекс «m / X» представляет «m или x», а «x» представляет «l» и «r», когда SPDV работает в состоянии утечки и состоянии пополнения, соответственно.
Нижний индекс «m / X» представляет «m или x», а «x» представляет «l» и «r», когда SPDV работает в состоянии утечки и состоянии пополнения, соответственно.
Некомпенсированные передаточные функции разомкнутого контура предлагаемой системы в режиме управления насосом, режиме управления утечкой и режиме управления пополнением, соответственно, представлены следующим образом:
(15)
Gmks = 60KmKv22πDmsωbp + 1s2ωm2 + 2ξmωms + 1,(16)
Glks = 60KmKvl2πDms2ωm2 + 2ξmωms + 1s2ωsv2 + 2ξsvωsvs + 1,(17)
Grks = 60KmKvr2πDms2ωm2 + 2ξmωms + 1s2ωsv2 + 2ξsvωsvs + 1.Очевидно, что эти сервоконтуры относятся к типу 0 и нестабильны, что может быть исправлено внутренними звеньями (т.е. KmI / s, KlI / s и KrI / s) соответственно. Таким образом, компенсированные передаточные функции разомкнутого контура предложенной системы в трех режимах соответственно равны:
(18)
Gmks = K1ssωip + 1s2ωm2 + 2ξmωms + 1,(19)
Glks = K2ss2ωl2 + 2ξlωls + 1s2ωsv2 + 2ξsvωsvs + 1,(20)
Grks = K3ss2ωr2 + 2ξrωrs + 1s2ωsv2 + 2ξsvωsvs + 1,, где KmI, KlI и KrI – внутренние коэффициенты усиления, K1 = 60KmIKv2Km / (2πDm), K2 = 60KlIKvlKm / (2πDm), K3 = 60KrIKvrKm / (2πDm) – компенсированные коэффициенты усиления разомкнутого контура предлагаемой системы в режиме управления насосом, утечка режим управления и режим управления пополнением соответственно.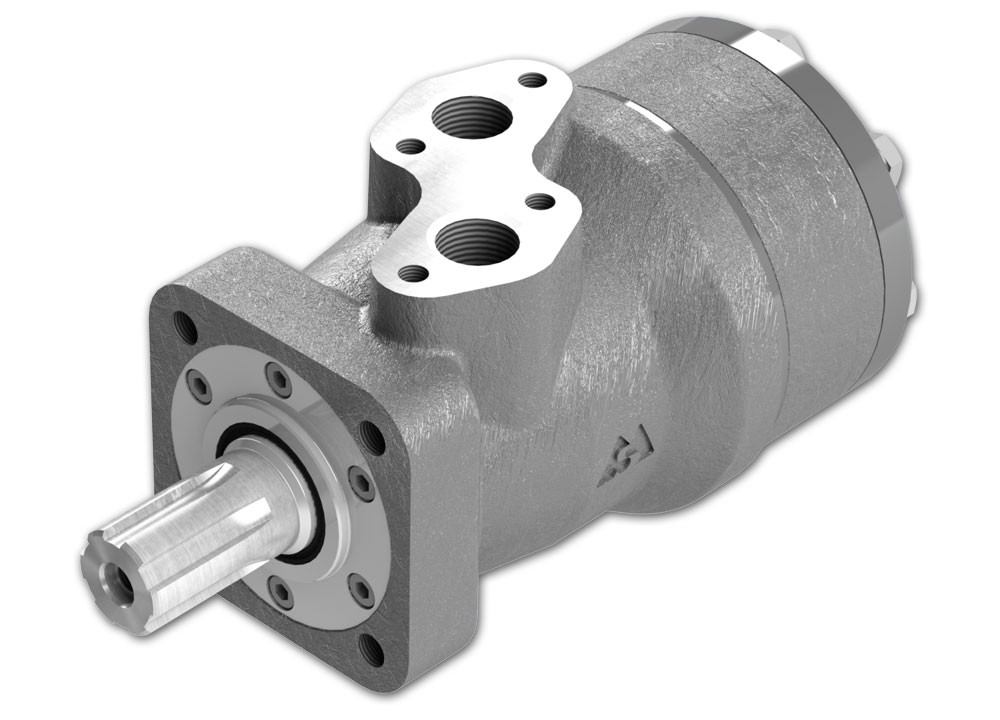
Из таблицы 2 мы отмечаем, что ωm = ωl = ωr <ωbp≪ωsv, поэтому собственная гидравлическая частота ωm (или ωl, или ωr) является самой низкой частотой разрыва и доминирует над динамическими характеристиками всей системы, поэтому эти высокочастотные контуры в уравнениях . (18) - (20) можно опустить. Согласно критерию стабильности и для получения соответствующего запаса по амплитуде и по фазе, эти компенсированные коэффициенты усиления без обратной связи должны удовлетворять следующим соотношениям: K1≤ωmξm, K2≤ωlξl, K3≤ωrξr. После оптимизации мы установили KmI = 1.5, KlI = 15, KrI = 15.Эти значения оценены консервативно из-за большого разброса коэффициентов демпфирования, увеличение этих значений действительно улучшит динамический отклик, но вызовет проблему нестабильности.
Статическая жесткость скорости замкнутого контура предложенной системы в режиме управления насосом составляет:
Статическая жесткость скорости замкнутого контура предложенной системы в режиме контроля утечки составляет:
Статическая жесткость скорости замкнутого контура предложенной системы в режиме управления пополнением составляет:
4.
 Анализ динамических характеристик
Анализ динамических характеристик4.1. Имитационная модель
На рис. 4 показана имитационная модель предлагаемой системы, установленной на платформе AMESim в соответствии со схемой на рис. 1. AMESim – это профессиональное программное обеспечение, используемое для мультидисциплинарного моделирования в единой графической среде, широко используемое в области автомобилестроения. гидравлические сервоприводы [17], аэрокосмическая техника и т. д. Имитация в AMESim должна пройти четыре этапа: Эскиз → Подмодели → Параметры → Моделирование.
Ключевые компоненты AMESim представлены в таблице 1. FP04 используется для установки характеристик гидравлической жидкости, в которой эффективный модуль объемной упругости жидкости составляет 1400 МПа. Чтобы смоделировать общие утечки насоса и двигателя Ct, неподвижное отверстие параллельно подключено к камере высокого давления двигателя, и его характеристическая скорость потока устанавливается равной 0,1 л / мин при падении давления на 0,1 МПа. Номинальный вход инвертора составляет 10 В, что соответствует максимальной скорости эклектического двигателя, а номинальный вход SPDV составляет 40 мА и –40 мА, что соответствует максимальному положительному открытию и максимальному отрицательному открытию соответственно.Поскольку предыдущая система нагружения насоса не может имитировать поведение трения гидравлического двигателя на низкой скорости, модель трения с эффектом Стрибека [18-19] добавлена для формирования новой системы нагружения, поэтому теперь момент нагрузки TL должен быть суммой крутящего момента трения Tf и предыдущего крутящего момента DLPL, создаваемого загрузочным насосом. Мы создаем контроллер с переменной структурой, который может переключаться в режим управления насосом, режим управления утечкой и режим управления пополнением в соответствии с требованиями управления.
Номинальный вход инвертора составляет 10 В, что соответствует максимальной скорости эклектического двигателя, а номинальный вход SPDV составляет 40 мА и –40 мА, что соответствует максимальному положительному открытию и максимальному отрицательному открытию соответственно.Поскольку предыдущая система нагружения насоса не может имитировать поведение трения гидравлического двигателя на низкой скорости, модель трения с эффектом Стрибека [18-19] добавлена для формирования новой системы нагружения, поэтому теперь момент нагрузки TL должен быть суммой крутящего момента трения Tf и предыдущего крутящего момента DLPL, создаваемого загрузочным насосом. Мы создаем контроллер с переменной структурой, который может переключаться в режим управления насосом, режим управления утечкой и режим управления пополнением в соответствии с требованиями управления.
Фиг.4. Имитационная модель на AMEsim
4.2.
 Параметрический анализ всей системы
Параметрический анализ всей системыВ этом разделе будет рассмотрено влияние управления клапаном на параметры системы при управлении без обратной связи, а эффект Штрибека в модели трения не принимается во внимание для ясного наблюдения. Для изучения влияния в целом, здесь управление насосом, контроль утечки и контроль пополнения не нацелены на конкретные стадии регулирования, что отличается от принципа, описанного в разделе 2.
4.2.1. Влияние управляющих сигналов на параметры системы
Ссылаясь на уравнения. Согласно (11) – (13) системы управления насосами, утечки и пополнения используют одни и те же собственные гидравлические частоты, т. Е. Ωm = ωl = ωr, которая является самой низкой собственной частотой во всей системе и доминирует над динамическими характеристиками общая система. Таким образом, можно сделать вывод, что введение клапана управления в систему управления насосом не меняет собственную частоту системы.
Однако схема управления клапаном оказывает значительное влияние на общие коэффициенты утечки системы и коэффициенты демпфирования, как показано на рис. 5, который испытан при PL = 10 МПа. На рис. 5 (a) показаны управляющие входы насоса с регулируемой скоростью и SPDV: при 0–5 с вход SPDV равен нулю, а вход насоса является линейным сигналом, поэтому система находится в режиме управления одним насосом; через 5-15 с сохраняется постоянный входной сигнал инвертора и на SPDV подается сигнал линейного изменения, следовательно, система находится в режиме параллельного управления клапан-насос; через 15 с, сохраняя все входы постоянными.Рис. 5 (b) и (c) показывают, что общие коэффициенты утечки при управлении насосом малы и постоянны и мало зависят от входов насоса, но они при управлении утечками и пополнении становятся больше и увеличиваются с увеличением входов клапана. Причины следующие. Сравнение формул. (11), (12) и (13), из-за введения управления клапаном, общие коэффициенты утечки при управлении утечкой и при регулировании пополнения увеличиваются на коэффициент расход-давление SPDV Kcl и Kcr, соответственно, то есть Cl = Ct + Kcl, Cr = Ct + Kcr.
5, который испытан при PL = 10 МПа. На рис. 5 (a) показаны управляющие входы насоса с регулируемой скоростью и SPDV: при 0–5 с вход SPDV равен нулю, а вход насоса является линейным сигналом, поэтому система находится в режиме управления одним насосом; через 5-15 с сохраняется постоянный входной сигнал инвертора и на SPDV подается сигнал линейного изменения, следовательно, система находится в режиме параллельного управления клапан-насос; через 15 с, сохраняя все входы постоянными.Рис. 5 (b) и (c) показывают, что общие коэффициенты утечки при управлении насосом малы и постоянны и мало зависят от входов насоса, но они при управлении утечками и пополнении становятся больше и увеличиваются с увеличением входов клапана. Причины следующие. Сравнение формул. (11), (12) и (13), из-за введения управления клапаном, общие коэффициенты утечки при управлении утечкой и при регулировании пополнения увеличиваются на коэффициент расход-давление SPDV Kcl и Kcr, соответственно, то есть Cl = Ct + Kcl, Cr = Ct + Kcr. Общие коэффициенты утечки Ct насоса и двигателя малы и постоянны, тогда как Kcl и Kcr намного больше, чем Ct и широко варьируются в зависимости от входа клапана Il и Ir (соответствующего открытию клапана) в соответствии с Kcl = CsvIl2PL, Kcr = CsvIr2Ps-PL.
Общие коэффициенты утечки Ct насоса и двигателя малы и постоянны, тогда как Kcl и Kcr намного больше, чем Ct и широко варьируются в зависимости от входа клапана Il и Ir (соответствующего открытию клапана) в соответствии с Kcl = CsvIl2PL, Kcr = CsvIr2Ps-PL.
Рис. 5. Влияние изменения входов насоса и клапана на общие коэффициенты утечки и коэффициенты демпфирования (PL = 10 МПа)
а) Входной сигнал насоса и СПДВ
б) Общие коэффициенты утечки
c) Коэффициенты демпфирования
Изменение общих коэффициентов утечки, вызванное входами клапана, приводит к положительным и отрицательным влияниям.
Положительный, коэффициенты демпфирования при параллельном управлении клапан-насос увеличиваются с увеличением общих коэффициентов утечки и становятся намного больше, чем при управлении насосом, как показано на рис. 5 (c), что повысит стабильность системы, а также динамический отклик за счет увеличения открытия коэффициент усиления контура K2 и K3 по критерию устойчивости K2≤ωlζl, K3≤ωrζr [16].
5 (c), что повысит стабильность системы, а также динамический отклик за счет увеличения открытия коэффициент усиления контура K2 и K3 по критерию устойчивости K2≤ωlζl, K3≤ωrζr [16].
Отрицательный, рис. 5 (c) также показывает, что коэффициенты демпфирования широко варьируются и даже превышают 1; как показано на рис. 6, скорость гидравлического двигателя колеблется в более широких пределах и больше подвержена изменениям нагрузки при увеличении входного давления клапана, что указывает на то, что увеличение общего коэффициента утечки снизит жесткость системы по скорости.И широкий разброс коэффициентов демпфирования, и снижение жесткости по скорости добавят трудности в прогнозировании и контроле динамических характеристик системы.
Рис. 6. Влияние входного клапана на скорость гидромотора (PL = 5 + 3sin0,5т МПа)
4.2.2. Влияние изменения нагрузки на параметры системы
На рис. 7 показано влияние изменения нагрузки на общие коэффициенты утечки при сохранении постоянных входов насоса и клапана (up = 6 В, Il = –15 мА, Ir = 5 мА).Установите прямоугольный сигнал на пропорциональный предохранительный клапан и создайте переменное давление нагрузки в диапазоне от 6 МПа до 9 МПа, что приблизительно равно прямоугольной волне, как показано на рис. 7 (а). На рис. 7 (b) показано, что общие коэффициенты утечки Ct насоса и двигателя при контроле утечки и пополнении аналогичны таковым при управлении насосом, но менее изменчивы из-за более высоких коэффициентов демпфирования. Рис. 7 (c) показывает, что Kcl и Ct имеют одинаковую тенденцию к изменению, когда система находится в режиме контроля утечек, что вызывает широкое изменение Cl.Однако фиг. 7 (d) показывает, что Kcr и Ct имеют противоположную тенденцию, когда система находится в режиме контроля пополнения, что делает Cr более постоянным с меньшими вариациями.
7 показано влияние изменения нагрузки на общие коэффициенты утечки при сохранении постоянных входов насоса и клапана (up = 6 В, Il = –15 мА, Ir = 5 мА).Установите прямоугольный сигнал на пропорциональный предохранительный клапан и создайте переменное давление нагрузки в диапазоне от 6 МПа до 9 МПа, что приблизительно равно прямоугольной волне, как показано на рис. 7 (а). На рис. 7 (b) показано, что общие коэффициенты утечки Ct насоса и двигателя при контроле утечки и пополнении аналогичны таковым при управлении насосом, но менее изменчивы из-за более высоких коэффициентов демпфирования. Рис. 7 (c) показывает, что Kcl и Ct имеют одинаковую тенденцию к изменению, когда система находится в режиме контроля утечек, что вызывает широкое изменение Cl.Однако фиг. 7 (d) показывает, что Kcr и Ct имеют противоположную тенденцию, когда система находится в режиме контроля пополнения, что делает Cr более постоянным с меньшими вариациями.
Рис. 7. Коэффициенты полной утечки при переменных нагрузках
а) Давление нагрузки
б) В управлении насосом
c) В контроле утечки
г) На контроле пополнения
Фактически, мы можем найти ответ из выражений Ct, Kcl и Kcr, i. е. Ct = Qpm2PL, Kcl = CsvIl2PL, Kcr = CsvIr2Ps-PL. И Ct, и Kcl изменяются обратно пропорционально PL, но Kcr пропорционален PL, кроме того, Cl = Ct + Kcl и Cr = Ct + Kcr, поэтому система в системе контроля пополнения имеет сравнительно стабильные коэффициенты общей утечки.
е. Ct = Qpm2PL, Kcl = CsvIl2PL, Kcr = CsvIr2Ps-PL. И Ct, и Kcl изменяются обратно пропорционально PL, но Kcr пропорционален PL, кроме того, Cl = Ct + Kcl и Cr = Ct + Kcr, поэтому система в системе контроля пополнения имеет сравнительно стабильные коэффициенты общей утечки.
Влияние изменения полного коэффициента утечки, вызванного изменением нагрузки, следующее.
Что касается коэффициентов демпфирования, как показано на рис. 8 (a), для одного и того же открытия клапана, коэффициенты демпфирования при контроле пополнения меньше, чем при контроле утечки, и более стабильны, чем при контроле утечки и при управлении насосом, что способствует управлению системой и прогнозированию.
В аспекте жесткости скорости, как показано на рис. 8 (b), амплитуда скорости при управлении насосом, управлении утечкой и контролем пополнения составляет 2 об / мин, 5,3 об / мин и 4,4 об / мин, соответственно, и гидравлическая скорость двигателя при управлении утечками и пополнении более приближена к прямоугольному сигналу по сравнению с таковым при управлении насосом, это означает, что системы с параллельным управлением клапан-насос имеют более низкую жесткость скорости и более чувствительны к изменению нагрузки из-за увеличения общие коэффициенты утечки, но система контроля пополнения имеет более высокую жесткость скорости по сравнению с системой контроля утечки. На рис.9 показано, что управление пополнением имеет больше свободы для повышения жесткости скорости за счет повышения давления подачи клапана Ps, просто потому, что повышение Ps приведет к уменьшению коэффициента расхода / давления клапана Kcr и коэффициента общей утечки Cr согласно Kcr = CsvIr2Ps-PL и Cr = Ct + Kcr.
На рис.9 показано, что управление пополнением имеет больше свободы для повышения жесткости скорости за счет повышения давления подачи клапана Ps, просто потому, что повышение Ps приведет к уменьшению коэффициента расхода / давления клапана Kcr и коэффициента общей утечки Cr согласно Kcr = CsvIr2Ps-PL и Cr = Ct + Kcr.
Рис. 8. Коэффициенты демпфирования и скорость гидравлического двигателя при переменных нагрузках
а) Коэффициенты демпфирования
б) Скорость гидравлического двигателя
Фиг.9. Скорость гидравлического двигателя при регулировании пополнения при различных Ps
Однако система контроля утечек не обладает такой гибкостью, потому что, когда SPDV находится в состоянии утечки, и его коэффициент увеличения потока Kvl = CsvPL, и коэффициент давления потока Kcl = CsvIl2PL относятся к давлению нагрузки PL, а не Ps, но PL изменяется с нагрузкой и не может быть задействован вручную.
Хотя вышеупомянутые регулярные законы получаются как системы в управлении с разомкнутым контуром, они все еще доступны для системы в управлении с обратной связью.
Согласно приведенному выше анализу параметров, контроль утечки будет применяться для улучшения низкоскоростных характеристик гидравлического двигателя на стадиях пуска и останова, а контроль пополнения будет применяться для достижения быстрой реакции на изменение нагрузки на равномерной стадии с высокой скоростью. , они подробно рассматриваются в разделах 4.3 и 4.4 соответственно.
4.3. Анализ низкоскоростной производительности
4.3.1. Теоретическая база
На низкоскоростные характеристики гидравлических двигателей влияет множество факторов, таких как внутренние факторы (пульсация рабочего объема двигателя, пульсация утечки и момент трения) и внешние факторы (пульсация потока и давления источника масла, возмущение нагрузки), но главный фактор момент трения. Трение известно как сложное нелинейное физическое явление, которое можно описать статическими моделями или динамическими моделями [20-22]. Рис.10 и уравнение. (24) представляют нормальную статическую модель момента трения, которая учитывает трение, кулоновское трение, вязкое трение и эффект Штрибека, описываемый третьим пунктом уравнения. (24):
Трение известно как сложное нелинейное физическое явление, которое можно описать статическими моделями или динамическими моделями [20-22]. Рис.10 и уравнение. (24) представляют нормальную статическую модель момента трения, которая учитывает трение, кулоновское трение, вязкое трение и эффект Штрибека, описываемый третьим пунктом уравнения. (24):
(24)
Tf = Te, n = 0, TeРис. 10. Модель нормального трения с эффектом Стрибека
Эффект Стрибека используется для описания поведения трения на низкой скорости [23]. Как показано на рис. 10, момент трения является функцией скорости n и уменьшается с увеличением скорости в области небольшой скорости (| n |  Этот эффект ужасно сказывается на устойчивости гидравлических двигателей на низких оборотах. Некоторые предыдущие исследования [24-25] показывают, что необходимое условие сохранения устойчивости на малых скоростях:
Этот эффект ужасно сказывается на устойчивости гидравлических двигателей на низких оборотах. Некоторые предыдущие исследования [24-25] показывают, что необходимое условие сохранения устойчивости на малых скоростях:
, где Kce – общий коэффициент утечки системы, B = dTf / dn – коэффициент демпфирования момента трения, а другие параметры определены как прежние.В области малых скоростей крутизна между моментом трения и скоростью отрицательна из-за эффекта Стрибека, т. Е. B <0,
.Коэффициент вязкого демпфирования Bm обычно очень мал, поэтому увеличение общего коэффициента утечки Kce и инерции J системы улучшит стабильность.
На рис. 10 нс называется критической скоростью. Скорость гидравлического двигателя будет колебаться ниже этой скорости, что часто называется явлением прилипания-проскальзывания, и колебания исчезнут выше этой скорости. Ns может быть задано как [26-27]:
где K – жесткость системы, ξ – коэффициент демпфирования системы. Таким образом, увеличение K, J и ξ приведет к снижению критической скорости. ξ может быть задано как [28]:
Таким образом, увеличение K, J и ξ приведет к снижению критической скорости. ξ может быть задано как [28]:
(27)
ξ = 14V0JβeDmB + BmJ + 4KceβeV0.Очевидно, что коэффициент демпфирования ξ связан с общим коэффициентом утечки Kce и коэффициентом демпфирования момента трения B . Увеличение Kce увеличит ξ и приведет к снижению критической скорости. Кроме того, ξ действует ужасно нелинейно в области малых скоростей. Как показано на рис. 10, отрицательное значение B становится больше, а ξ становится меньше по мере уменьшения скорости в области малых скоростей, что вызывает более высокую вероятность колебаний и затрудняет получение более низкой критической скорости [29].
Кроме того, гидравлические насосы не могут работать ниже минимальной стабильной скорости, иначе это вызовет сильные колебания потока и давления; более того, электродвигатель не может обеспечить достаточный крутящий момент для управления насосом при сравнительно низкой частоте, особенно при запуске и останове.
На основании анализа, приведенного выше, контроль утечки используется для запуска и остановки ступеней с низкой скоростью. Этот метод имеет следующие преимущества.
1) Насос может работать со стабильной скоростью, что делает поток источника масла более стабильным, а электродвигатель может выдавать соответствующий крутящий момент.
2) Увеличьте общие коэффициенты утечки и коэффициенты демпфирования, добавив утечку, контролируемую клапаном, что повысит стабильность на низких скоростях и позволит получить меньшую критическую скорость.
3) Скорость гидравлического двигателя уменьшается с увеличением открытия клапана, и изменение коэффициентов демпфирования в результате изменения открытия клапана прямо противоположно изменению коэффициентов демпфирования в области низких скоростей, обсуждавшейся ранее, и может компенсировать уменьшение коэффициентов демпфирования из-за отрицательная крутизна трения, что способствует меньшей критической скорости.
4.3.2. Проверка
Как обсуждалось ранее, гидравлические двигатели не могут работать на низкой скорости в гидравлических системах с регулируемой скоростью, потому что насосы должны работать выше минимальной стабильной скорости. Чтобы подчеркнуть преимущество контроля утечки в улучшении характеристик на низкой скорости, мы даже предполагаем, что насос может работать на любой низкой скорости в следующих моделированиях. Эти симуляции выполняются в режиме управления без обратной связи, чтобы избежать проблемы устойчивости, вызванной управлением с обратной связью.Мы адаптируем модель трения с эффектом Стрибека, показанным в формуле. (24) и установите следующие параметры: Ts = 700 Нм, Tc = 500 Нм, Tv = 0, ns = 10 об / мин.
На рис. 11 показано влияние эффекта Штрибека на момент трения и скорость гидравлического двигателя, когда система находится в режиме управления насосом. При этом расход насоса увеличивается с нуля до 7,2 л / мин, когда входной сигнал инвертора увеличивается с нуля до 2 В за 10 секунд. Очевидно, что после добавления эффекта Стрибека переход от статического момента к моменту кулоновского трения является экспоненциальным, а не мгновенным, а низкая скорость гидравлического двигателя нестабильна.Все это доказывает, что модель трения может в некоторой степени имитировать реальное трение, существующее в гидравлических двигателях. Рис. 11 (b) также указывает на то, что управление одним насосом не может обеспечить работу на низкой скорости.
Очевидно, что после добавления эффекта Стрибека переход от статического момента к моменту кулоновского трения является экспоненциальным, а не мгновенным, а низкая скорость гидравлического двигателя нестабильна.Все это доказывает, что модель трения может в некоторой степени имитировать реальное трение, существующее в гидравлических двигателях. Рис. 11 (b) также указывает на то, что управление одним насосом не может обеспечить работу на низкой скорости.
Рис. 11. Влияние эффекта Стрибека на момент трения и скорость двигателя при управлении насосом
a) Момент трения
б) Скорость гидравлического двигателя
Рис.12 показано влияние различных предварительных открываний на пусковые характеристики, когда система находится в режиме контроля утечек. На рис. 12 (а) показаны управляющие сигналы клапана и инвертора. Поддерживая постоянный управляющий сигнал инвертора (up = 2 В, что соответствует np = 600 об / мин и Qp = 7,2 л / мин), управляющий сигнал клапана соответственно уменьшается с –8 мА, –20 мА, –32 мА до ноль, что соответствует уменьшению предварительного открытия с 20%, 50%, 80% до нуля соответственно. Красная кривая (предварительное открытие 0%) – это управляющий сигнал инвертора, когда система находится в режиме управления насосом.Рис. 12 (b) и (c) показывают, что общие коэффициенты утечки и коэффициенты демпфирования при контроле утечки сильно меняются в зависимости от входов клапана и достигают максимума в начале запуска. Как показано на рис. 12 (d), по сравнению с управлением насосом, контроль утечки может в основном преодолеть влияние эффекта Стрибека и получить звуковую стабильность на низких скоростях, кроме того, можно контролировать время пуска и ускорение, регулируя предварительное открытие , линейка состоит в том, что большее предварительное открытие приводит к большему запаздыванию и ускорению.
Красная кривая (предварительное открытие 0%) – это управляющий сигнал инвертора, когда система находится в режиме управления насосом.Рис. 12 (b) и (c) показывают, что общие коэффициенты утечки и коэффициенты демпфирования при контроле утечки сильно меняются в зависимости от входов клапана и достигают максимума в начале запуска. Как показано на рис. 12 (d), по сравнению с управлением насосом, контроль утечки может в основном преодолеть влияние эффекта Стрибека и получить звуковую стабильность на низких скоростях, кроме того, можно контролировать время пуска и ускорение, регулируя предварительное открытие , линейка состоит в том, что большее предварительное открытие приводит к большему запаздыванию и ускорению.
Рис. 12. Реакция системы на утечку управления
а) Управляющие сигналы
б) Общие коэффициенты утечки
c) Коэффициенты демпфирования
d) Скорость гидравлического двигателя
Использование контроля утечки на этапе остановки также приводит к аналогичному свойству, описанному выше, здесь нет необходимости в детальной проверке. На рис. 13 показаны низкоскоростные характеристики при управлении с обратной связью. Понятно, что на стадиях пуска и останова управление одним насосом не может обеспечить хорошие характеристики на низкой скорости, потому что нестабильность в управлении с разомкнутым контуром ухудшает то, что в управлении с замкнутым контуром. Однако контроль утечки может обеспечить хорошие характеристики на низкой скорости и хорошее отслеживание при управлении с обратной связью.
На рис. 13 показаны низкоскоростные характеристики при управлении с обратной связью. Понятно, что на стадиях пуска и останова управление одним насосом не может обеспечить хорошие характеристики на низкой скорости, потому что нестабильность в управлении с разомкнутым контуром ухудшает то, что в управлении с замкнутым контуром. Однако контроль утечки может обеспечить хорошие характеристики на низкой скорости и хорошее отслеживание при управлении с обратной связью.
Рис.13. Низкоскоростные характеристики при управлении с обратной связью
4.4. Анализ эффективности быстрого реагирования
В соответствии с принципом, изложенным в разделе 2, управление пополнением применяется для улучшения реакции на возмущение нагрузки на равномерной стадии с высокой скоростью. На этой высокой скорости эффект Штрибека неэффективен, и его можно не использовать. Эта секция выполняется под управлением замкнутого контура.
На рис. 14 показаны динамические отклики при управлении насосом и регулированием пополнения на ступенчатые нагрузки, которые нагружает пропорциональный предохранительный клапан через 6 и 10 секунд.Эти ответы обладают следующими свойствами.
1) При любом способе управления большая нагрузка вызывает большее падение скорости и более длительное время установления.
2) Для той же ступенчатой нагрузки падение скорости при управлении пополнением больше, чем при управлении насосом, что показывает, что при управлении с обратной связью жесткость скорости при управлении пополнением все еще ниже, чем при управлении насосом. Это потому, что жесткость скорости изменяется обратно пропорционально общим коэффициентам утечки в соответствии с уравнениями.(21) – (23), и существует Ct 3) Параметры системы (общие коэффициенты утечки и коэффициенты демпфирования) при контроле пополнения сравнительно стабильны, например коэффициент демпфирования составляет около 0,5. 4) Управление пополнением может обеспечить более быструю реакцию на изменение нагрузки по сравнению с управлением насосом. Есть две причины: во-первых, системы управления насосом и управления пополнением имеют одинаковую собственную частоту, то есть ωm = ωr, как обсуждается в разделе 4.1; во-вторых, сравнивая уравнения. В (4) и (7) есть ωsv≫ωbp, что означает, что клапан SPDV реагирует быстрее, чем насос с регулируемой скоростью, и может регулировать поток быстрее. Рис.14. Отклики на ступенчатые нагрузки a) Скорость гидравлического двигателя б) Общий коэффициент утечки c) Коэффициент демпфирования Как показано на рис. 15, система управления пополнением может получить два преимущества за счет повышения давления подачи Ps. 1) Ускорение реакции. Ссылаясь на усиление потока Kvr = CsvPs-PL и уравнение. 2) Улучшение закрытой жесткости. Что касается коэффициента расхода / давления Kcr = CsvIr2Ps-PL, увеличение Ps приведет к уменьшению Kcr и Cr, а увеличение K3 и уменьшение Cr приведет к увеличению жесткости в закрытом состоянии согласно уравнению. (23). Рис.15. Реакция скорости гидравлического двигателя на ступенчатые нагрузки при различных значениях Ps На основе системного принципа в разделе 2 и анализа производительности в разделах 4.3 и 4.4 мы применяем управление переменной структурой ко всему процессу регулирования. Как показано на рис. 4, система нагружается с помощью модели трения с эффектом Стрибека и нагружающим насосом, давление подачи Ps SPDV устанавливается равным 15 МПа, а ступенчатые нагрузки соответственно нагружаются при 20 и 30 с и создают давление ступенчатой нагрузки в 3,8 МПа. Рис.16. Реакция системы в дежурном круге б) Ошибка скорости Ступени пуска и останова (увеличенное изображение) c) Давление в системе Равномерная высокоскоростная сцена (увеличенное изображение) d) Коэффициенты демпфирования Точка переключения на низкой скорости (12 об / мин) определяется отклонением потока, создаваемым насосом переменной скорости, работающим выше его минимальной стабильной скорости (500 об / мин), и утечками в насосе и гидравлическом двигателе. По сравнению с системой управления одним насосом, система управления с переменной структурой обеспечивает хорошие низкоскоростные характеристики за счет негерметичности управления на этапах пуска и останова и быстрой реакции на изменение нагрузки за счет пополнения управления на равномерной ступени (показано на рис.16 (a)), и имеет меньшую ошибку скорости на вышеуказанных трех ступенях (показано на рис. 16 (b)), и может в основном избежать воздействия давления при запуске и остановке (показано на рис. 16 (c)), и имеет больше стабильные и более высокие коэффициенты демпфирования, которые увеличиваются с уменьшением скорости на стадиях пуска и останова и достигают максимального значения (показано на рис. На рис. 16 (а) также показано, что предлагаемая система обеспечивает хорошее отслеживание скорости в общем процессе регулирования и обеспечивает плавное переключение между различными режимами управления, что можно пояснить на рис.17, где представлены характеристики клапана и насоса в рабочем цикле. Во время процесса управления с обратной связью и изменения входа клапана, и скорости насоса соответствуют предыдущему предположению, и эти входные данные и соответствующий поток являются непрерывными без изменений. Рис.17. Отклики клапана и насоса в рабочем цикле а) Скорость насоса б) Вход SPDV c) Расход SPDV и расход насоса Передача энергии в гидравлических системах происходит как поток жидкости под давлением, а мощность является произведением потока и давления. В этой статье представлена новая гидравлическая система с регулируемой скоростью в параллельном управлении структурой «клапан-насос». 1) По сравнению с традиционными системами управления насосами, системы параллельного управления клапан-насос имеют одинаковую собственную частоту, но имеют более высокие общие коэффициенты утечки и коэффициенты демпфирования, которые сильно различаются в зависимости от рабочих точек (открытие клапана и давление нагрузки). 2) На стадиях пуска и останова используется режим управления параллельными клапанами на утечку для повышения устойчивости на низких скоростях за счет увеличения общих коэффициентов утечки и коэффициентов демпфирования. Более того, увеличение коэффициентов демпфирования, вызванное утечкой, управляемой клапаном, просто компенсирует снижение коэффициентов демпфирования из-за отрицательной крутизны трения, что дополнительно улучшает характеристики на низких скоростях. 3) На равномерной стадии с высокой скоростью используется режим управления параллельным клапаном пополнения для достижения быстрой реакции на возмущение нагрузки. 4) Во всем процессе структуры (режимы) управления изменяются в зависимости от требований к управлению, и режимы переключаются плавно, и достигается хорошее отслеживание скорости, кроме того, регулируемый насос обеспечивает основной поток, а клапан работает при небольшом состоянии потока, поэтому предлагаемая система по-прежнему могут эффективно работать как системы управления насосом. 5) В целом, параллельное управление переменной структурой клапан-насос устанавливает гибкий механизм управления с помощью двух каналов управления клапаном и управления насосом, где структуры управления меняются в зависимости от требований управления, и могут улучшить комплексные характеристики гидравлических систем переменной скорости с большой мощностью , например, низкоскоростные характеристики, быстрая реакция на изменение нагрузки и высокий КПД. 1. Санкт-Петербург РОССИЯ-2006 1.1 S2 Санкт-Петербург РОССИЯ-2006 Электрогидравлическая система подъема ворот, водный шлюз Санкт-Петербург С2. Цилиндр Ø 800 / 320×120000 мм ……………………………………………….4 шт. Спроектирована и поставлена электрогидравлическая силовая установка для подъема и опускания шиберных затворов шириной 116 м и массой около 2700 тонн «под ключ». После подсчета всех сопротивлений и ожидаемой толщины льда расчетный вес был определен в 5000 тонн. Компьютерная система основана на S7-400, как для рабочей, так и для резервной системы. Гидравлическая система приводных ворот, откатных и секторных ворот. Гидравлический привод Спроектирована и поставлена комплектная электрогидравлическая система для двух секторных ворот и двух откатных ворот, которые представляют собой вспомогательное гидромеханическое оборудование для ворот главного сектора с электроприводом (локомотив). Цилиндры для секторных ворот поставляются вместе с опорами и подшипниками (кардан, кардан) для секторных ворот. 2. ПЛОТИНА «ГРУНЯ», СЕРБИЯ- 2006 3. ПЛОТ «Вручи» -2006 4. НАСОСНАЯ СТАНЦИЯ НА РЕКЕ ЗАПАДНАЯ МОРАВА – СЕРБИЯ 2007 Выполнено строительство водозабора на реке Западная Морава вместе с насосной станцией (реализация Фазы II), где гидро-механическая и электрическая часть выполнена в Трстенике. 5. V1-V6 ЗАЩИТА ОТ НАВОДНЕНИЙ ГОРОДА САНКТ-ПЕТЕРБУРГА, РОССИЯ 2008 Цилиндр Ø 450 / Ø 200 x 4500 (7500) мм ……………………………… ..… 64 шт. 6. Плотина «ГАМГУМ», Тунис 2008 НАСОСНАЯ ВОДЯНАЯ БАШНЯ ВЫХОД ИЗ ВОРОТ Цилиндр Ø 140 / Ø 63 x 1350 мм ………………………………………………… 1 шт. Гидравлический привод предназначен для маневрирования шиберной заслонки выходного помещения, а также для приведения в действие затвора на выходном патрубке. Проектирование, согласование проекта, производство оборудования, заводские испытания, упаковка для транспортировки за границу, поставка оборудования и расходных материалов для водонапорной башни и выходного помещения ворот, а также доставка полной технической документации с инструкциями на плотину GAMGOUM в Тунисе в 2008.Электрогидравлическое оборудование введено в эксплуатацию в 2009 году и произведена окончательная передача оборудования. 7. ПЛОТИНА НА РЕКЕ ТИСА, СЕРБИЯ, 2008 Выполнен капитальный ремонт гидроустановки гидрозатвора на Тисинской плотине месторождения №1. – Ремонт гидроцилиндров Ø 500 / Ø 200 x 5200 мм сегментного затвора ……….. 2 шт. 8. ПЛОТИНА «БРЕСНИЦА» -ПРОКУПЛЕ, СЕРБИЯ 2008 9. ВОЛГА-ДОНСКИЙ КАНАЛ-ВОЛГОГРАД, РОССИЯ 2009 10. ПЛОЩАДЬ «ГРУНЯ», СЕРБИЯ- 2009 11. DAM «OURKISS» – АЛЖИР 2010 (со встроенным индикатором положения рукояти) Проект представлен на согласование инвестору. После проверки проекта начнется производство электрогидравлической системы управления работой предохранительных и рабочих ворот выходного отверстия фундамента плотины «Уркисс» в Алжире. 12. НАВИГАЦИОННЫЙ ЗАМОК «ГОРОДЕЦ», РОССИЯ, 2012 • ЗАДВИЖНЫЕ ВОРОТА МОРСКОЙ КАМЕРЫ Цилиндр Ø 350/160 x 5000 мм …………………………………………… 8 шт. (со встроенным линейным микроимпульсным преобразователем стержневого типа с интерфейсом SSI) 13. НАВИГАЦИОННЫЙ ЗАМОК «ВОЛГА-ДОНСКИЙ КАНАЛ», РОССИЯ – 2012 Разработана полная техническая документация на электрогидравлический привод управления двойными затворами на нижнем, среднем и верхнем конце судоходного шлюза №№30-31 на канале «Волга-Дон». Разработана полная техническая документация на электрогидравлический привод управления шиберными затворами на нижнем, среднем и верхнем конце навигационного шлюза №№30-31 на канале «Волга-Дон». Также было разработано проектное решение для управления движением шиберных заслонок как комбинированное регулирование объема, дроссельной заслонки и частотного регулирования. 14. НАВИГАЦИОННЫЙ ШЛЮЗ «КРАСНОГОРСК» на р. ИРТИШ, РОССИЯ – 2012 Разработана полная техническая документация на электрогидравлический привод рабочего и запасного двухстворчатых и шиберных затворов шлюз Красногорск. Также было разработано проектное решение по управлению движением шиберных затворов на основе объемно-дроссельного управления. 15. НАВИГАЦИОННЫЙ ШЛЮЗ «КРАСНОГОРСК» на реке ИРТИШ, РОССИЯ – 2013 • ВОРОТА РАБОЧИЕ И ЗАПАСНЫЕ ДВОЙНЫЕ ЗАМКИ Цилиндр Ø 280/140 x 5000 мм …………………………………………… 6 шт. • ВОРОТА НАБОРНОГО ЗАМКА Цилиндр Ø 200/80 x 4600 мм …….. ……………………………………… 2 шт. (со встроенным линейным микроимпульсным преобразователем стержневого типа с интерфейсом SSI) Гидравлический привод Блоки управления ……………………………………….. . ………………………………………… 8 шт Два гидропривода в нижней головке шлюза предназначены для маневрирования шиберных затворов (наполнение и опорожнение камеры шлюза), рабочих и запасных двойных затворов. Два гидропривода в верхней части шлюза предназначены для маневрирования рабочих двустворчатых ворот. 16. ВОДОНАКПЛЕНИЕ «КРАСНОДАР», РОССИЯ – 2013 Разработана полная техническая документация на электрогидравлический привод для манипулирования 10 секциями 5 двухкрюковых затворов для регулирования уровня воды в аккумуляторе.Разработано проектное решение управления движением секций ворот на основе объемно-дроссельного управления. Разработана полная техническая документация на электрогидравлический привод экологической решетки, помогающей рыбе возвращаться вверх по течению в озеро. Проектное решение для управления движением было основано на регулировании громкости-дросселя. 17. НАВИГАЦИОННЫЙ ЗАМОК «№7», ВОЛГО-ДОНСКИЙ КАНАЛ, РОССИЯ, 2014 Полная техническая документация была разработана для двух гидроприводов, используемых для маневрирования одного затвора в верхней части шлюза, который позволяет заполнить морскую шлюзовую камеру. 18. ВОДОНАКПЛЕНИЕ «КРАСНОДАР», РОССИЯ – 2015 • ВОРОТА С ДВОЙНЫМИ КРЮКАМИ Гидравлический привод Блоки управления ……………………………………….. . ………………………………………… 20 шт. Энкодер SSI с тросом для измерения положения …………………… …. 20 шт. Электрогидравлический привод для манипулирования 10 секциями 5 двухкрюковых затворов для регулирования уровня воды в аккумуляторе. Каждая секция приводится в движение 2 гидроцилиндрами с синхронным движением. • ЭКОЛОГИЧЕСКИЕ РЕШЕТКИ Гидравлический привод Блоки управления ……………………………………….. . ………………………………………… 2 шт Энкодер SSI с тросом для измерения положения …………………… ….. 4 шт. Два электрогидравлических привода для двух экологических решеток, которые помогают рыбе возвращаться вверх по течению в озеро. Один из приводов подвижный и приводится в действие гидромотором, входящим в состав электрогидравлического привода. Каждая решетка приводится в движение 2 гидроцилиндрами с синхронным движением. Оборудование поставлено в декабре 2015 года, введено в эксплуатацию в декабре 2016 года. 19. НАВИГАЦИОННЫЙ ЗАМОК «№7», ВОЛГО-ДОНСКИЙ КАНАЛ, РОССИЯ, 2015 • ВОРОТА ЗАМОК ВЕРХНЕЙ ГОЛОВКИ Цилиндр Ø 360/200 x 8540 мм ……………………………………… .. …… 3 шт. (с двумя встроенными гибкими микроимпульсными датчиками линейного перемещения с интерфейсом SSI) Гидравлический привод N = 75 кВт) …………………………………………………………………2 шт Блоки управления ……………………………………….. . ………………………………………… 4 шт Два гидравлических привода используются для маневрирования одной заслонки в верхней части шлюза, что позволяет заполнить камеру морского шлюза. Каждый гидравлический привод используется для маневрирования одного гидроцилиндра. Движение гидроцилиндров синхронизировано. Третий цилиндр – запчасть. Управление движением гидроцилиндра основано на частотном и объемно-дроссельном регулировании. Оборудование поставлено в ноябре 2016 года. Ввод в эксплуатацию осуществлен в апреле 2017 года. 20. НАВИГАЦИОННЫЙ ЗАМОК «КРАСНОДАР», РОССИЯ – 2017 Полная техническая документация была составлена для двух электрогидравлических приводов для управления одинарной заслонкой в верхней головке шлюза и для двух электрогидравлических приводов для управления двухсекторной заслонкой и двумя шиберными заслонками, обеспечивающими наполнение и опорожнение камеры морского шлюза в нижней головке шлюза.Разработано проектное решение управления движением ворот на основе объемно-дроссельного управления. Проектное решение по управлению движением было основано на регулировании объема-дросселя. В этой книге собраны наиболее интересные недавние результаты в области машиностроения в России, дается увлекательный обзор состояния дел в этой области в этой стране, который будет интересен широкому кругу читателей.Обсуждается широкий круг тем и проблем современного машиностроения, включая динамику машин, материаловедение, прочность конструкций и трибологические свойства, транспортные технологии, качество машин и инновации. В книгу вошли избранные доклады, представленные на 8-й конференции «Современная инженерия: наука и образование», прошедшей в Санкт-Петербургском государственном политехническом университете в мае 2019 года при поддержке Союза инженеров России. Авторы являются экспертами в различных областях техники, и все статьи прошли тщательную рецензию.Книга будет интересна инженерам-механикам, преподавателям инженерных дисциплин и выпускникам инженерных специальностей. MESE конструкционная прочность материалов инженерия динамика машин трибологическое поведение машины качество машиностроение в России
 (20), увеличение Ps увеличит Kvr и коэффициент усиления разомкнутого контура K3 и, наконец, улучшит реакцию системы.
(20), увеличение Ps увеличит Kvr и коэффициент усиления разомкнутого контура K3 и, наконец, улучшит реакцию системы. 4.5. Управление переменной структурой
 Также установлен регулятор переменной структуры, и режимы переключаются в соответствии с желаемой скоростью n (n = um / Km, nmax = 60 об / мин).Когда 0≤n≤12, используется режим контроля утечки; когда 58≤n≤60, применяется режим управления пополнением; в остальном используется режим управления насосом. Эта секция выполняется под управлением замкнутого контура.
Также установлен регулятор переменной структуры, и режимы переключаются в соответствии с желаемой скоростью n (n = um / Km, nmax = 60 об / мин).Когда 0≤n≤12, используется режим контроля утечки; когда 58≤n≤60, применяется режим управления пополнением; в остальном используется режим управления насосом. Эта секция выполняется под управлением замкнутого контура. Поэтому установите вход инвертора на 2 В, что соответствует начальной скорости насоса 600 об / мин и расходу 7,3 л / мин. Предварительное открытие клапана должно быть настроено таким образом, чтобы полностью пропускать поток. Следовательно, начальный ток клапана составляет –13 мА, что соответствует 32,5% открытия. Точка переключения с высокой скоростью должна быть немного меньше nmax и установлена на 58 об / мин.
Поэтому установите вход инвертора на 2 В, что соответствует начальной скорости насоса 600 об / мин и расходу 7,3 л / мин. Предварительное открытие клапана должно быть настроено таким образом, чтобы полностью пропускать поток. Следовательно, начальный ток клапана составляет –13 мА, что соответствует 32,5% открытия. Точка переключения с высокой скоростью должна быть немного меньше nmax и установлена на 58 об / мин. 16 (d)).
16 (d)). 4.6. Анализ эффективности
 Давление соответствует нагрузкам без вмешательства человека. Следовательно, контроль энергии – это, по сути, контроль потока. Если расход, регулируемый насосом и клапаном, назначен разумно в параллельной системе клапан-насос, будет получена эффективная экономия энергии. Здесь K = Qp / Qv определяется как коэффициент энергосбережения, где Qp – расход на выходе насоса переменного рабочего объема, а Qv – расход, проходящий через SPDV.Конечно, чем больше значение K, тем лучше будет эффект экономии энергии. Как показано на рис. 17 (c), большая часть потока подается насосом с регулируемой скоростью, и только меньшая часть потока подается с помощью SPDV или утечки через клапан во всем процессе. Таким образом, очевидно, что система управления переменной структурой обладает сравнительно высокой эффективностью при достижении хорошего динамического отклика. Более того, коэффициент K станет больше, и предложенная система будет более эффективной, если максимальная скорость возрастет.Это связано с тем, что большая часть потока, соответствующего максимальной скорости, подается насосом, а не клапаном, а поток клапана в основном изменяется при изменении нагрузки.
Давление соответствует нагрузкам без вмешательства человека. Следовательно, контроль энергии – это, по сути, контроль потока. Если расход, регулируемый насосом и клапаном, назначен разумно в параллельной системе клапан-насос, будет получена эффективная экономия энергии. Здесь K = Qp / Qv определяется как коэффициент энергосбережения, где Qp – расход на выходе насоса переменного рабочего объема, а Qv – расход, проходящий через SPDV.Конечно, чем больше значение K, тем лучше будет эффект экономии энергии. Как показано на рис. 17 (c), большая часть потока подается насосом с регулируемой скоростью, и только меньшая часть потока подается с помощью SPDV или утечки через клапан во всем процессе. Таким образом, очевидно, что система управления переменной структурой обладает сравнительно высокой эффективностью при достижении хорошего динамического отклика. Более того, коэффициент K станет больше, и предложенная система будет более эффективной, если максимальная скорость возрастет.Это связано с тем, что большая часть потока, соответствующего максимальной скорости, подается насосом, а не клапаном, а поток клапана в основном изменяется при изменении нагрузки.
5. Выводы
 По сравнению с системой контроля утечек, эта система контроля пополнения имеет более стабильные и подходящие коэффициенты демпфирования и большую гибкость и может дополнительно улучшить динамический отклик и жесткость скорости за счет повышения давления питания клапана.
По сравнению с системой контроля утечек, эта система контроля пополнения имеет более стабильные и подходящие коэффициенты демпфирования и большую гибкость и может дополнительно улучшить динамический отклик и жесткость скорости за счет повышения давления питания клапана.
Торговые данные и цена импорта гидравлических двигателей по коду HS 8412298109
ДАТА HS_CODE Описание продукта Торговая марка Страна Вес нетто 90 Статистическая стоимость Название Грузоотправителя 2017-09-01 8412298109 ГИДРАВЛИЧЕСКИЕ ДВИГАТЕЛИ (CR.Гражданские самолеты) на участок трубопровода МВС-ВА в Черном море гидромотор EATON CORPORATION USA 0,125,236 NO 1 *** СЛОВЕНИЯ 11,4 1616,88 *** ***** ***** 2017-09-01 8412298109 ДВИГАТЕЛИ ГИДРАВЛИЧЕСКАЯ СИЛА (НЕ ДЛЯ ГРАЖДАНСКОЙ АВИАЦИИ): ГИДРАВЛИЧЕСКИЙ ДВИГАТЕЛЬ Героторная гидравлическая ДОРОГА, строительная, сельскохозяйственная техника, DANFOSS POWER SOLUTIONS APS 151 OMTW 315 5 *** ДАНИЯ 121.25 1631,29 *** ***** ***** 2017-09-01 8412298109 ДВИГАТЕЛИ ГИДРАВЛИЧЕСКАЯ СИЛА (НЕ ДЛЯ ГРАЖДАНСКОЙ АВИАЦИИ): ГИДРАВЛИЧЕСКАЯ ДВИГАТЕЛЬ героторный гидравлический ROAD, строительная, сельскохозяйственная техника, DANFOSS POWER SOLUTIONS SP.  ZOO DANFOSS OMS 151F0506 OMS 315 8 DANFOSS POW
ZOO DANFOSS OMS 151F0506 OMS 315 8 DANFOSS POW *** DENMARK 382.9 4408 *** * ***** 2017-09-01 8412298109 Двигатели забойные -ВЗД диаметром 245 мм, для высоких температур, это гидравлические силовые агрегаты и относятся к станкам объемным.ВДМ предназначен для бурения наклонно-направленных, глубоких, вертикальных, горизонтальных ВДМ D *** РОССИЯ 2170 149574,92 *** ***** ***** 2017-09-01 8412298109 Двигатели для забойных скважин – это гидравлические силовые двигатели и относятся к станкам объемным. ВДМ предназначен для бурения наклонно-направленных, глубоких, вертикальных, горизонтальных И ДРУГИХ НЕФТЯНЫХ СКВАЖИН. ДПМ 172 ММ ДИАМЕТР RA *** РОССИЯ 1286.5 104008,75 *** ***** ***** 2017-09-01 8412298109 Винтовые забойные двигатели -VZD 240 мм Гидравлические двигатели IS и относится к машинной объемной.  ВДМ предназначен для бурения наклонно-направленных, глубоких, вертикальных, горизонтальных и других масел. ВДМ ДИАМЕТР
ВДМ предназначен для бурения наклонно-направленных, глубоких, вертикальных, горизонтальных и других масел. ВДМ ДИАМЕТР *** РОССИЯ 2100 149545,08 *** ***** ** *** 2017-09-01 8412298109 Hydromotors POWER (MOTOR hydro power), СТАЛЬ.Предназначен для создания МОМЕНТА В буровом аппарате для проведения бурения. : POCLAIN HYDRAULICS INDUSTRIE SAS POCLAIN NO A47397T MFA44-99-121-000-000-7D0 2 *** ФРАНЦИЯ 528,32 22505,7 *** ***** ***** 2017-09-01 8412298109 1 гидравлические двигатели для гидравлической системы свеклоуборочных комбайнов и погрузчиков Euro TIGER EURO-MAUS.PRINTSIP действие переводит линейное движение масла из гидравлический насос во вращательное движение.ПРИМЕНЕНИЕ ДЛЯ ВРАЩЕНИЯ: Гидромоторы OMV 800 *** ФРАНЦИЯ 392 17367,44 *** ***** ***** 2017-09- 01 8412298109 ДВИГАТЕЛИ ГИДРАВЛИЧЕСКИЕ (НЕ ДЛЯ ГРАЖДАНСКОЙ АВИАЦИИ; НЕ ДЛЯ ПОЖАРНОЙ БЕЗОПАСНОСТИ), доступны в качестве запасных частей (НОВИНКА) TM “CNH” для сельхозтехники: Гидромоторы МЕХАНИЗМ УПРАВЛЕНИЯ ПРИВОДОМ ИНТЕРВАЛ ПОСАДКИ CE *** БЕЛЬГИЯ 1,65 199 *** ***** ***** 2017-09-01 8412298109 ЗАПЧАСТИ ДЛЯ ДВИГАТЕЛЯ SCHEPARUBKI FARMI (Гидравлический двигатель 250CC, MP 250 CD, 8KW) предназначен для привода подающих роликов рубильных машин.  МОЩНОСТЬ ГИДРАВЛИЧЕСКОГО ДВИГАТЕЛЯ (ГИДРАВЛИЧЕСКИЙ ДВИГАТЕЛЬ 400CC, MR 400 SH D, 4,8 кВт) Predn
МОЩНОСТЬ ГИДРАВЛИЧЕСКОГО ДВИГАТЕЛЯ (ГИДРАВЛИЧЕСКИЙ ДВИГАТЕЛЬ 400CC, MR 400 SH D, 4,8 кВт) Predn *** ФИНЛЯНДИЯ 47,7 1493,36 *** ***** ** *** Ссылка Энергетика
Гидравлический привод
(Резервуар V = 5000 л, 2 +1 насосных агрегата Qmax = 180 л / мин, p = 320 бар, 90 кВт) … 2 шт. Связь между оборудованием компьютера осуществляется через PROFIBUS-DP, как для работы, так и для резервного копирования. При пролете 116 м точность достигаемого синхронного перемещения составляет от 5 до 20 мм.
Связь между оборудованием компьютера осуществляется через PROFIBUS-DP, как для работы, так и для резервного копирования. При пролете 116 м точность достигаемого синхронного перемещения составляет от 5 до 20 мм.
1,2 S1 Санкт-Петербург РОССИЯ-2006
Цилиндр Ø 320 / 140×3000 мм ………………………………………………… 4 шт.
Цилиндр Ø 250 / 125×2700 мм ………………………………………… …… 2 шт.
(Резервуар V = 250 л, 1 +1 насосный агрегат Qmax = 60 л / мин, p = 350 бар, 15 кВт)..4 шт.
(Резервуар V = 250 л, 1 +1 насосный агрегат Qmax = 25 л / мин, p = 320 бар, 4 кВт)…. 4шт Каждый цилиндр имеет встроенный датчик хода типа Balluff в штоке поршня.На каждый цилиндр секторной и шиберной заслонки поставлен отдельный гидроагрегат.
Каждый цилиндр имеет встроенный датчик хода типа Balluff в штоке поршня.На каждый цилиндр секторной и шиберной заслонки поставлен отдельный гидроагрегат.
Ремонтные работы на:
Ворота конические №1300 – Ремонт повреждений ………………………………………. 3 шт.
Откатные ворота – Общий ремонт гидроцилиндры ………………………… … 4 шт.
Выполнены ремонтные работы:
Затвор конический №1300 – Ремонт повреждений … … … … … … … … … … … .. ………..4шт
Затвор откатной – Ремонт гидроцилиндров … … … … … … … … … … … ……. ….. 4 шт
Сливные насосы – Поставка новых агрегатов … … … … … … … … … … … .. . … … … 2 шт
Установлен полностью новый гидравлический и электрический монтаж с соответствующими строительными работами на насосной станции.
Электрогидравлический привод предназначен для маневрирования 64 секционных ворот объекта В1-В6 с целью предотвращения затопления города Санкт-Петербурга.
Блоки управления………………………………………… … ……………………………………….. 64 шт.
Гидравлический привод
(Бак, V = 12000 л, два насосных агрегата Q = 180 л / мин, p = 320 бар, N = 75 кВт) 6 шт.
Ячейки электрического управления …………………………………….. ………………………………… 6 шт.
Новые рабочие блоки прошли заводские испытания и доставлены , а также новые блоки управления, новые электрические шкафы и новый распределительный трубопровод, которые устанавливаются вместе с уже отремонтированными гидроцилиндрами.
Проектирование, изготовление и поставка электрогидравлической системы управления, установка на месте, испытания, ввод в эксплуатацию, а также теоретическое и практическое обучение персонала на месте. Блоки управления позволяют одновременно опускать до 12 затворов, обеспечивая синхронное движение цилиндров каждого затвора.
Цилиндр Ø 140 / Ø 63 x 1350 мм ………………………………………………. 3 шт.
(со встроенным индикатором положения рукояти)
Гидравлический привод
(Резервуар V = 250 л, два насосных агрегата Q = 6.3 л / мин, p = 250 бар, 2,2 кВт) …….. 1 шт.
Блоки управления ……………………………………….. . …………………………………………. …… 3 шт
Шкаф электроуправления ……………………………….. ……… ………………………………….. . 1 шт.
Трубопровод с доп. Оборудованием ………….. ………………………. ……………………….. 1 комплект
………………………. ……………………….. 1 комплект
Гидравлический привод предназначен для маневрирования трех шиберных затворов водонапорной башни.
(со встроенным индикатором положения рукояти)
Гидравлический привод
(резервуар V = 250 л, два насосных агрегата Q = 6,3 л / мин, p = 250 бар, 2,2 кВт) …….. 1 шт.
Блоки управления ……………………………………….. . …………………………………………. …… 1 шт
Шкаф электроуправления ……………………………….. ……… …………………………………… 1 шт.
Трубопровод с доп. Оборудованием ……………. ………………………………………….. …… 1 комплект
Произведен капитальный ремонт гидроустановок:
– Ремонт гидроцилиндров Ø 250 мм x 1500 заслонки сегментной заслонки …………. 1 шт.
– Капитальный ремонт гидроблоков …………………………….. 2 шт.
– Капитальный ремонт гидроагрегата . …………………………… 1 шт.
…………………………… 1 шт.
– Ремонт трубопроводов и сопутствующего оборудования на трубопроводе
Капитальный ремонт гидромеханического оборудования водонапорной башни и трубной галереи шиберного затвора, ремонт крана, замена плоского затвора № 800 на дисковый затвор № 800, демонтаж плоских задвижек NO 350NP10 (3 шт.) и их замены на затворы-бабочки с электронным приводом, поставка и монтаж электрошкафа привода затвора, антикоррозийная защита оборудования в галерее и водонапорной башне (трубопровод NO 800 и NO 350, площадь P = 800м) на плотине «Бресница» – Прокупле.
Электрогидравлическая система типовой шиберной затвора водозабора канала «Волга-Дон», полная техническая документация на два варианта проекта привода шиберной заслонки и для был разработан контроль движения шиберной заслонки гидрозатвора. В проекте детализированы два типа проектных решений до уровня готовой документации для разработки электрогидравлических систем. Первый вариант основан на использовании управления объемным демпфированием, а второй вариант основан на использовании насосов с постоянным расходом, работа которых регулируется через преобразователи частоты.В рамках проектной документации в части расчетов для обоих вариантов в пакете программ MATLAB дано полное моделирование динамики работы электрогидравлических систем.
Первый вариант основан на использовании управления объемным демпфированием, а второй вариант основан на использовании насосов с постоянным расходом, работа которых регулируется через преобразователи частоты.В рамках проектной документации в части расчетов для обоих вариантов в пакете программ MATLAB дано полное моделирование динамики работы электрогидравлических систем.
Капитальный ремонт гидропривода конических ворот NO 200 плотины «Gruža» Крагуевац.
Мы выполнили ремонт гидроустановок, а именно:
– Ремонт привода гидроцилиндров конического затвора……………………… 2 шт.
– Ремонт трубопроводов и сопутствующего оборудования на трубопроводе
Цилиндр Ø 250/110 x 1550 мм …………………………………………… 2 шт.
Гидравлический привод
(Резервуар V = 250 л, два насосных агрегата Q = 10 л мин, p = 280 бар, N = 5,5 кВт) ………. 1 шт.
1 шт.
Блоки управления ………………………………………… .. ……………………………………… 2 шт.
Ячейки электрического управления …………….. ………………………… ……………….. ………….. 1 шт.
Поставка, ввод в эксплуатацию и окончательная передача электрогидравлической установки завершены в 2011 году. Также было разработано проектное решение для управления движением двойных заслонок как комбинированное регулирование объема, дроссельной заслонки и частотного регулирования.
Также было разработано проектное решение для управления движением двойных заслонок как комбинированное регулирование объема, дроссельной заслонки и частотного регулирования.
(Резервуар V = 1300 л, два насосных агрегата Q = 210 л / мин, p = 120 бар, N = 30 кВт) ……………………………………………… ……………………………… .. 4 шт.
Ячейки электроуправления ……………………………………………………………………….. 4 шт
Разработана конструкция новой электрогидравлической управляющей установки, которая упрощает манипуляции с раздвижными воротами галереи и двойными воротами.
Приводы и гидроцилиндры были испытаны и доставлены на заводе, а также блоки управления, новые электрические шкафы и новая система распределения трубопроводов.
Оборудование поставлено в сентябре 2013 года. Проектное решение для управления движением было основано на частотном регулировании и регулировании громкости-дросселя.
Проектное решение для управления движением было основано на частотном регулировании и регулировании громкости-дросселя.
(Резервуар V = 2200 л, два насосных агрегата Q = 41 л / мин, p = 150 бар, N = 15 кВт) ……………………………………………… ……………………………… … 2 шт.
Ячейки электрического управления. ………………………………………….. ………………………….. 5 шт. 20 существующих гидроцилиндров были модифицированы для размещения датчика положения энкодерного типа с тросом.
20 существующих гидроцилиндров были модифицированы для размещения датчика положения энкодерного типа с тросом.
(Резервуар V = 1300 л, два насосных агрегата Q = 90 л / мин, p = 150 бар, N = 22 кВт) ……………………………………………… ……………………………… … 2 шт.
Ячейки электроуправления…………………………………………… ………………………….. 2 шт. 4 существующих гидроцилиндра были модифицированы для размещения датчика положения энкодерного типа с тросом.
4 существующих гидроцилиндра были модифицированы для размещения датчика положения энкодерного типа с тросом.
(Резервуар V = 2500 л, два насосных агрегата Q = (350 + 100) л / мин, p = 150 бар, достижений в машиностроении | SpringerLink
Об этом производстве
Введение
Ключевые слова
Редакторы и филиалы
- 1.Санкт-Петербургский политехнический университет, Санкт-Петербург, Россия,
Библиографическая информация
- Заголовок книги Достижения в машиностроении
- Подзаголовок книги Избранные доклады конференции «Современная инженерия: наука и образование», Санкт-Петербург, Россия, июнь 2019 г.
- Редакторы
Александр Н.Евграфов
- Название серии Конспект лекций по машиностроению
- Сокращенное название серии Lect.Notes Машиностроение
- DOI https://doi.org/10.1007/978-3-030-39500-1
- Информация об авторских правах Springer Nature Switzerland AG 2020
- Имя издателя Спрингер, Чам
- электронные книги Инженерное дело Инженерное дело (R0)
- ISBN в твердом переплете 978-3-030-39499-8
- ISBN в мягкой обложке 978-3-030-39502-5
- электронная книга ISBN 978-3-030-39500-1
- Серия ISSN 2195-4356
- Серия E-ISSN 2195-4364
- Номер издания 1
- Количество страниц IX, 234
- Количество иллюстраций 98 ч / б иллюстраций, 50 цветных иллюстраций
- Темы
Машины и элементы машин
Вибрация, динамические системы, управление
Транспортные технологии и транспортная инженерия - Купить эту книгу на сайте издателя
| АВСТРИЯ | ХОРВАТИЯ | |
| магнит.работает Magnet- und Industrietechnik vertriebs gmbh Г-н Маркус Фройденталер Estermannstraße 8a A-4020 Linz Австрия Тел. + 43 732 778 780 Факс. +43 732 778 780-10 E-Mail: Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра. | IB BLUMENAUER KG Г-н Дэвид Блюменауэр Г-н Инго Блуменауэр Hauptstraße 7 D-83112 Frasdorf Германия Тел.+49 8052 374 Факс. +49 8052 4355 Мобильный: +49 175 16 77 906 Электронная почта: Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра. www.ib-blumenauer.com | |
| ФРАНЦИЯ И БЕЛЬГИЯ | ШВЕЦИЯ | |
KLEVAGE S.A.S | ASPGREN, Consulting AB Г-н Аспгрен Ларс Винкельгатан 5 SE-777 50 Smedjebacken Швеция Тел. +46 (0240) 707 28 Факс. +46 (0240) 740 28 Мобильный: +46 (070) 621 95 36 Электронная почта: Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра. | |
| ПОЛЬША | РОССИЯ | |
DHC SYSTEMS Sp.z o.o. Sp. k. Электронная почта: Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра. | Brightwell Engineering and Trading Ltd Николай Николаев Олег Томшинский Ленима ул. 33 RU-197136 St.Санкт-Петербург Россия Тел. +7 (812) 336 36 09 Факс. +7 (812) 336 36 10 Мобильный: +7 (921) 944 01 14 Электронная почта: Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра. Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра. | |
| СЕРБИЯ / МАКЕДОНИЯ | ИСПАНИЯ | |
Heppenstall Technologie AG | Schlag Jürgen Г-н Юрген Шлаг c / Padre Arrupe, 39 Madrid E-28050 Spain Тел. +34 (91) 650 25 32 Факс. +34 (91) 650 25 32 Мобильный: +34 (696) 00 88 54 Электронная почта: Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра. | |
| УКРАИНА | ИТАЛИЯ | |
| ООО «ИМТ Интермаштрейдинг» Клыгин Виталий, директор Александр Василенко, менеджер ул. Харьков 61002 Украина Тел. + 380 57 757 43 30 Факс. +380 57 757 43 20 Мобильный: +380 68 348 51 00 Клыгин Мобильный: +380 68 348 51 07 Александро Электронная почта: Этот адрес электронной почты защищен от спам-ботов.У вас должен быть включен JavaScript для просмотра. Электронная почта : Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра. Веб: www.imt-kh.com.ua | AMERI sas Consulenze & Rappresentanze Г-н Джакомо Амери Г-н Симоне Амери Via Lucca 2/15 16146 Genova Италия Тел. +39 010 362 14 73 Факс +39010 890 04 43 Электронная почта: Этот адрес электронной почты защищен от спам-ботов.У вас должен быть включен JavaScript для просмотра. Электронная почта : Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра. | |
| ВЕНГРИЯ, РУМЫНИЯ, БОСНИЯ И ГЕРЦЕГОВИНА | ТУРЦИЯ | |
| IDECO Heavy Equipment kft Госпожа Лаура Вилла, генеральный директор Szabadsàg utca 75 7918 Tòtùjfalu Венгрия Тел.Лаура Вилла: +36 70 522 12 35 Тел. Г-жа Элиза Болдор: +40 75 368 26 58 Электронная почта: Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра. Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра. Интернет: www.ideco.group | YETIM Export Import Mr. Yetim Immentalstr. 9 DE-79104 Freiburg Германия Тел .: + 49-761-34577 Факс: + 49-761-25822 Мобильный: + 49-171-493 5879 Электронная почта: Этот адрес электронной почты защищен от спам-ботов.У вас должен быть включен JavaScript для просмотра. |
Выпуск 16 – Практическое руководство по устройствам, работающим на свободной энергии
скудная информация, которая появилась опубликовано на него. Возможно, это правда.
вихрь имеет влияние, которое существует.
A Устройство Устройство для преобразования
. Но они ошибаются.
Таблица 2 Зависимость n-образного r
Рис.1 Схематический вид Magn
COMMER КОММЕРЦИАЛИЗАЦИЯ COMMER CIALI
Это не определено.Цель t
ЭТО ЭТО ПРОРЫВ
Minto Wheel The Mother Earth News,
Оригинальные идеи Идеи из
Однако не прошло и двух столетий.
Ньюман Мотор / генераторный двигатель Ньюмана
General Motors Motors “Ro
The Waterjet Waterjet Turbine T
Процедура Процедура t
и массоперенос низкопроводящих
Производство электрон-позитронных пар
Научный писатель Маллов убит в Fam
Мне сказали, что Джин, в кооперативе
так называемый «кинетобарический эффект»
ССЫЛКИ: ССЫЛКИ: 1 M.Бьюкен
· Физическая модель экспериментов
Добавить комментарий