Манипуляторы ручные: Ручной манипулятор – купить выгодно
Манипуляторы для дистанционной работы с радиоактивными веществами. Ряды грузоподъемности – РТС-тендер
ГОСТ 25230-82
(СТ СЭВ 2459-80)
Группа Ф44
ОКП 69 6830
Дата введения 1983-01-01
Постановлением Государственного комитета СССР по стандартам от 27 апреля 1982 г. N 1693 срок действия установлен с 01.01.1983 г. до 01.01.1988 г.*
________________
* Ограничение срока действия снято постановлением Госстандарта России от 03.08.92 N 852 (ИУС N 11, 1992 год). – Примечание изготовителя базы данных.
ВНЕСЕНО Изменение N 1, утвержденное и введенное в действие с 01.01.88 Постановлением Госстандарта СССР от 19.06.87 N 2189
Изменение N 1 внесено изготовителем базы данных по тексту ИУС N 10, 1987 год
1. Настоящий стандарт распространяется на манипуляторы, предназначенные для дистанционной работы с радиоактивными веществами и источниками ионизирующих излучений, и устанавливает ряды грузоподъемности от 0,1 до 5000 кг.
Стандарт полностью соответствует СТ СЭВ 2459-80.
2. Термины и пояснения основных понятий манипуляторов – в соответствии с приложением 1а.
3. В зависимости от признаков функционирования и конструкции устанавливается четыре исполнения манипуляторов: ручные захваты, шпаговые, копирующие, некопирующие.
2, 3. (Измененная редакция, Изм. N 1).
4. Грузоподъемность должна выбираться из следующего ряда: 0,1; 0,5; 1,0; 1,6; 2,5; 3,2; 5,0; 10; 16; 25; 50; 100; 160; 250; 320; 500; 1000; 1600; 2500; 5000 кг.
5. Номинальные и максимальные значения грузоподъемности для четырех исполнений манипуляторов должны соответствовать значениям, указанным в таблице.
Наименование исполнения | Грузоподъемность, кг | |||||||
Номинальная | Максимальная | |||||||
до 1 | св. | св. 10 | св. 100 | до 10 | св. 10 | св. 100 | св. 1000 | |
Ручные захваты | 0,5 1,0 | 1,6 | – | – | 2,5 | – | – | – |
Шпаговые манипуляторы | 0,1 0,5 1,0 | – | – | – | 1,0 5,0 | – | – | – |
Копирующие манипуляторы | 0,1 0,5 | 1,6 2,5 3,2 5,0 10,0 | 16 25 50 100 | 160 250 | Выбирается из ряда п. | |||
Некопирующие манипуляторы | – | – | – | – | 10,0 | 25 50 100 | 160 250 320 500 1000 | 1600 2500 5000 |
 1
1  4, но не более 500 кг
4, но не более 500 кг
Примечания:
1. Номинальная грузоподъемность – грузоподъемность, соответствующая максимально допустимой массе объекта манипулирования, на перемещение которого рассчитан манипулятор в пределах всей зоны обслуживания.
2. Максимальная грузоподъемность – грузоподъемность, соответствующая максимально допустимой массе объекта манипулирования, на перемещение которого рассчитан манипулятор в пределах ограниченной зоны обслуживания, установленной в нормативно-технической документации.
6. (Исключено, Изм. N 1).
7. Ряды крутящих моментов на рабочих органах и на наконечниках исполнительных органов манипуляторов приведены в справочном приложении 1.
(Измененная редакция, Изм. N 1).
ПРИЛОЖЕНИЕ 1 (справочное). Ряды крутящих моментов на рабочих органах и на наконечниках исполнительных органов манипуляторов
ПРИЛОЖЕНИЕ 1
Справочное
Ряды крутящих моментов на рабочих органах и на наконечниках исполнительных органов манипуляторов:
0,10; 0,16; 0,25; 0,40; 0,63; 1,0; 1,6; 2,5; 4,0; 6,3; 10; 16; 25; 40; 63; 100; 160; 250; 400; 630; 1000 Н·м
(Измененная редакция, Изм. N 1).
ПРИЛОЖЕНИЕ 1а (справочное). ТЕРМИНЫ И ПОЯСНЕНИЯ ОСНОВНЫХ ПОНЯТИЙ МАНИПУЛЯТОРОВ
ПРИЛОЖЕНИЕ 1а
Справочное
Термин | Пояснение |
Манипулятор | Определение по ГОСТ 25686-85 |
Ручной захват | Манипулятор без опоры, удерживаемый рукой оператора |
Шпаговый манипулятор | Манипулятор, имеющий поступательное движение связующего органа, выполненного в виде трубы, соединяющей рабочий орган с рукояткой управления |
Копирующий манипулятор | Манипулятор, движение рабочего органа которого повторяет перемещение кисти руки оператора |
Некопирующий манипулятор | Манипулятор, движение рабочего органа которого не повторяет перемещение кисти руки оператора |
Наконечник манипулятора | Часть исполнительного органа манипулятора, на который крепится съемный рабочий орган |
Грузоподъемность манипулятора | Способность манипулятора в один прием поднять и переместить рабочим органом соответствующую массу предмета |
Крутящий момент захвата манипулятора | Наибольший момент, который допускается развивать захватом манипулятора при вращении захвата вокруг своей продольной оси при любом положении исполнительного органа |
Рабочий орган манипулятора Рабочий орган | Часть исполнительного органа манипулятора обычно в виде захвата, предназначенная для выполнения различных операций манипулятором Примечание. |
Исполнительный орган манипулятора Исполнительный орган | Функциональная часть манипулятора, предназначенная для выполнения сигналов и движений, поступающих от задающего органа манипулятора |
Связующий орган манипулятора Связующий орган | Функциональная часть манипулятора, предназначенная для передачи сигналов и движений от задающего органа к исполнительному органу |
Задающий орган манипулятора Задающий орган | Функциональная часть манипулятора, предназначенная для создания управляющих сигналов и движений |
 Захваты манипулятора могут быть механическими, электромагнитными, вакуумными и т.п.
Захваты манипулятора могут быть механическими, электромагнитными, вакуумными и т.п.ПРИЛОЖЕНИЕ 1а. (Введено дополнительно, Изм. N 1).
N 1).
Электронный текст документа
подготовлен АО “Кодекс” и сверен по:
официальное издание
М.: Издательство стандартов, 1982
Редакция документа с учетом
изменений и дополнений
подготовлена ЗАО “Кодекс”
Научно-производственная фирма «Сосны» – Копирующий электромеханический манипулятор для работы в радиационно-защитных камерах
Посмотреть видеоролик
Электромеханический манипулятор копирующего типа предназначен для работы в защитной камере, которая входит в состав установки рубки ОТВС ВВЭР-1000 в Опытно-демонстрационном центре (ОДЦ) ФГУП «ГХК».
В процессе работы установки рубки в камеру поступают измельченные фрагменты ОТВС, которые проходят через вибросито, а затем передаются на дальнейшие операции по переработке ОЯТ. Крупные фрагменты, не прошедшие через сито, с помощью манипулятора возвращаются в зону рубки на повторное измельчение. Захват фрагмента производится оператором в ручном режиме с помощью задающего устройства или кнопок на пульте управления. Перемещение руки в зону рубки и возвращение в исходное положение может выполняться как в ручном режиме, так и в автоматическом по заданной программе.
Захват фрагмента производится оператором в ручном режиме с помощью задающего устройства или кнопок на пульте управления. Перемещение руки в зону рубки и возвращение в исходное положение может выполняться как в ручном режиме, так и в автоматическом по заданной программе.
Особенности конструкции разработанного манипулятора связаны со сложной формой и ограниченным объемом защитной камеры. За основу была взята кинематическая схема, содержащая систему вложенных валов с проходными понижающими редукторами волнового типа. Это позволило существенно повысить точность позиционирования схвата манипулятора, сохранив его высокую нагрузочную способность.
Все электромеханические приводы, отвечающие за движения руки, вынесены за пределы камеры. Это обеспечивает их защиту от воздействия ионизирующих излучений и облегчает доступ к ним при ремонте и настройке.
Электромеханическая рука манипулятора имеет шесть степеней свободы. Вращательные движения во всех суставах руки создаются отдельными электрическими приводами и передаются через приводные валы, каскады конических зубчатых колес и волновые редукторы. Рабочим органом руки является схват. Отдельные двигатели отвечают за вращение схвата, его движение в вертикальном направлении, а также сведение и разведение губок.
Рабочим органом руки является схват. Отдельные двигатели отвечают за вращение схвата, его движение в вертикальном направлении, а также сведение и разведение губок.
Система управления (СУ) обеспечивает контроль и управление манипулятором в ручном и автоматическом режимах. Ручной режим позволяет перемещать каждый сустав манипулятора по отдельности в различных направлениях. Автоматический режим позволяет перемещать несколько суставов одновременно по заданным траекториям.
Функции СУ включают:
- получение, отображение, контроль, регистрацию данных о состоянии манипулятора и компонентов СУ;
- диагностирование манипулятора и компонентов СУ;
- ввод и обработку команд оператора;
- расчет траекторий движений рабочего органа манипулятора;
- контроль столкновений манипулятора с объектами и со стенками защитной камеры;
- контроль и ограничение скоростей и ускорений двигателей манипулятора.
Управление манипулятором осуществляется дистанционно с пульта управления, расположенного в операторском помещении. Интерфейс оператора включает задающее устройство и сенсорную панель, с помощью которых могут быть выбраны следующие варианты перемещения руки манипулятора:
Интерфейс оператора включает задающее устройство и сенсорную панель, с помощью которых могут быть выбраны следующие варианты перемещения руки манипулятора:
- посуставное;
- вдоль координатных осей X, Y, Z;
- по заранее заданной траектории;
- по новой расчетной траектории;
- по траектории задающего устройства.
Ручное управление манипулятором реализовано следующими способами:
1) с помощью задающего устройства;
2) с помощью сенсорной панели. На панели можно выбрать один из вариантов – посуставное управление, которое предполагает задание положения каждого из шести суставов руки с помощью управляющих кнопок, либо управление перемещением схвата манипулятора вдоль координатных осей X, Y, Z внутри виртуальной модели камеры с контролем столкновений.
В автоматическом режиме работы реализована возможность перемещения схвата манипулятора по одной из заранее заданных траекторий, в том числе автоматическое возвращение рабочего органа в исходное положение. В этом случае также осуществляется контроль столкновений со стенками камеры.
В этом случае также осуществляется контроль столкновений со стенками камеры.
Программное обеспечение системы управления разработано специалистами Научно-производственной фирмы «Сосны».
Технические характеристики копирующего манипулятора:
| Внутренние размеры обслуживаемого помещения (ДхШхВ) | 940х750х1100 мм |
| Рабочая среда | воздух |
| Мощность дозы гамма-излучения в зоне работы руки | не более 2,5·104 рад/ч |
| Грузоподъемность на максимальном вылете руки | 10 кг |
| Количество осей / степеней свободы | 6 |
| Ход по оси А1 | 200 мм |
| Угол вращения по оси А2 | 360 градусов |
| Угол вращения по оси А3 | ±110 градусов |
| Угол вращения по оси А4 | 360 градусов |
| Угол вращения по оси А5 | 360 градусов |
| Угол вращения по оси А6 | 360 градусов |
| Раскрытие губок схвата | 80 мм |
| Время автоматического перемещения фрагментов | не более 30 с |
| Погрешность позиционирования манипулятора | ± 5 мм |
| Масса манипулятора | 700 кг |
Элементы манипулятора, которые находятся в контакте с радиоактивной средой, изготовлены из коррозионно-стойкой стали и предусматривают возможность дезактивации. Для защиты от попадания влаги и пыли во внутренние механизмы руки предусмотрены уплотнительные элементы.
Для защиты от попадания влаги и пыли во внутренние механизмы руки предусмотрены уплотнительные элементы.
Конструкция копирующего манипулятора может быть адаптирована для работы в защитных камерах любой конфигурации и для обращения с различными объектами.
Количество просмотров: 318
Робот-манипулятор — что это такое и в каких сферах используется
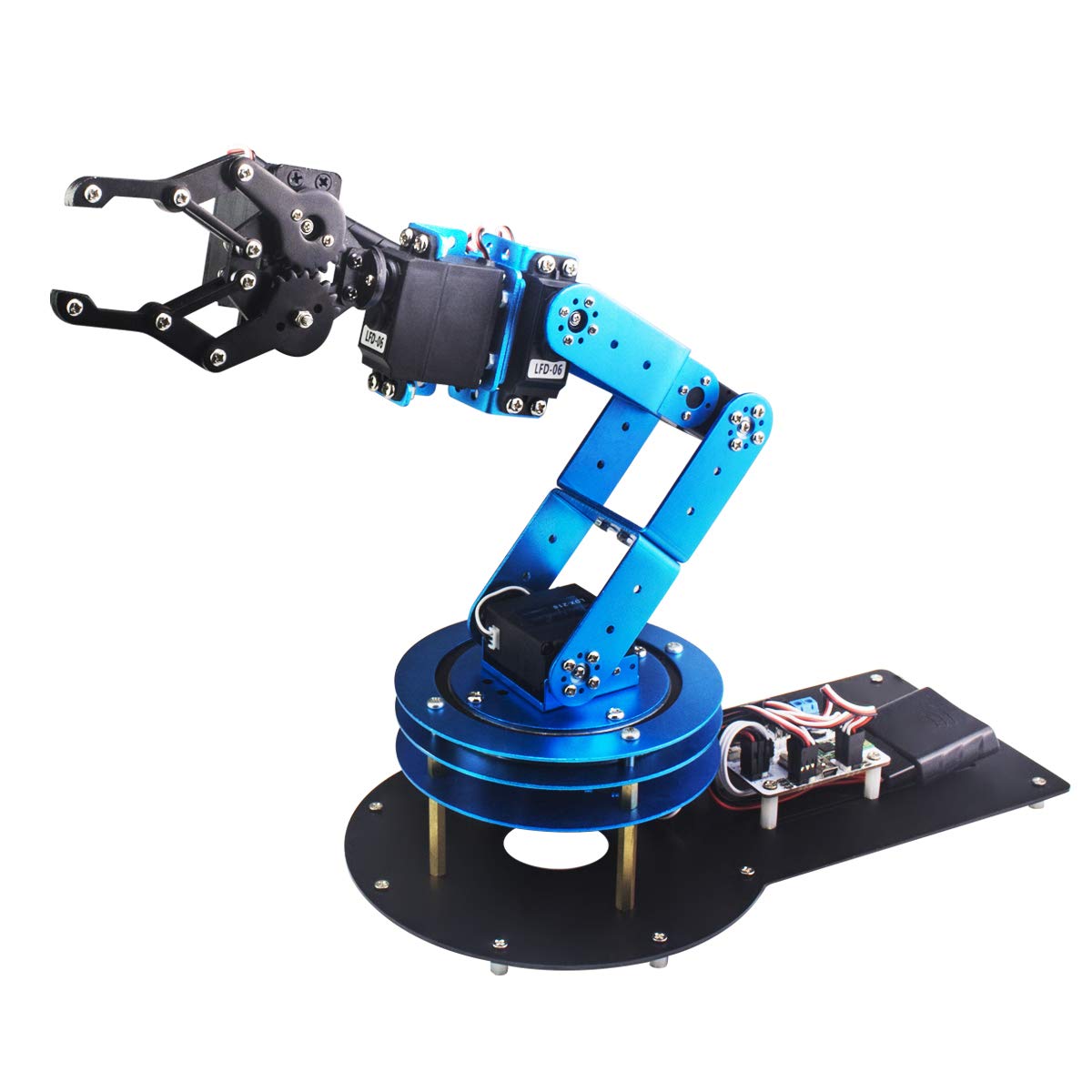
Робот-манипулятор — тип промышленных роботов. Такие роботы выполняют функции человеческой руки. Соединения сегментов манипулятора допускают вращательные и поступательные движения.
Роботы могут распознавать, понимать и менять окружающую среду. Их сфера деятельности каждый год расширяется. Внедряются новые программы, роботы могут выполнять всё более точные действия: собирать автомобили, сортировать мусор, выбирать только спелые плоды при сборе урожая.
Сегодня расскажем о том, где и как применяются манипуляторы.
Обзор применения
В зависимости от специфики, манипуляторы используются в разных отраслях промышленности и выполняют разные задачи. Но все они призваны улучшить условия труда работников и снизить расходы предприятия.
Но все они призваны улучшить условия труда работников и снизить расходы предприятия.
Роботы-манипуляторы — решение для тех сфер, в которых часто случаются ошибки из-за человеческого фактора. Там, где человеку не хватает скорости реакции или существуют опасные условия, приходит на помощь робот.
Автомобильная промышленность
Использование роботов-манипуляторов в этой сфере позволяет выполнять одновременно несколько задач быстро и точно.
Их используют для литья, штамповки, сварки, переноса грузов, установки деталей, сборки кузова и других работ. Роботы-манипуляторы в машиностроении обеспечивают беспрерывное производство.
Электротехника, электроника
В сфере электроники важна точность, скорость, умение работать с мельчайшими деталями. Рука робота-манипулятора не дрогнет и выполнит задачу быстрее, чем это сделали бы люди.
Сравните работу робота и человека в видео, в котором робот собирает жесткий диск:
 com/embed/ym64NFCWORY” frameborder=”0″ allow=”accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture” allowfullscreen=””/>
com/embed/ym64NFCWORY” frameborder=”0″ allow=”accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture” allowfullscreen=””/>
Строительство
В этой отрасли роботы-манипуляторы помогают строить здания, ориентируясь на информационную модель. Это помогает избежать ошибок установки, ускорить процесс строительства, уменьшить количество отходов.
К тому же с помощью манипуляторов можно строить сложные геометрические формы.
Химическая промышленность
Это сфера контакта с опасными веществами. Внедрение роботов-манипуляторов в химическую промышленность минимизирует участие людей в процессах производства.
В сферах, где присутствие человека обязательно, используются специальные коллаборативные роботы, которые взаимодействуют с работниками.
Медицина и фармацевтика
Здесь тоже используются коллаборативные роботы-манипуляторы, которые помогают врачам проводить сложные операции. Такие манипуляторы обычно сверхчувствительные, имеют биосовместимое покрытие.
Также часто используются манипуляторы для создания и упаковки фармацевтических препаратов и мединструментов.
Иные области
Роботы-манипуляторы используются и в других отраслях. Их можно запрограммировать практически на любой ручной труд.
Автоматизация производства с помощью роботов-манипуляторов позволит предприятиям увеличить скорость работы, снизить расходы и повысить рентабельность.
Если вы уже сделали выбор в пользу автоматизации и ищете оборудование для роботов, мы с радостью проконсультируем вас.
Роботы-манипуляторы, что они могут и где применяются
Содержание
Что такое робот-манипулятор
Источник: https://abb.com
Роботом-манипулятором принято называть тип промышленных роботов с функциями, аналогичными функциям человеческой руки. Манипулятор может быть как самостоятельным устройством, так и находиться в составе более сложного роботизированного комплекса. Сегменты манипулятора имеют соединения, допускающие вращательное (например, у шарнирного робота) или поступательное (линейное) движение. В этой статье мы рассказываем о роботах-манипуляторах и примерах их применения.
В этой статье мы рассказываем о роботах-манипуляторах и примерах их применения.
Источник: habr.com
Растущая потребность в снижении эксплуатационных расходов на предприятиях является основной движущей силой мирового рынка робототехники. Снижение расходов может быть достигнуто за счет уменьшения ошибок в производственном процессе, потерь сырья и количества несчастных случаев, повышения технологической гибкости и производительности предприятия, улучшения условий труда и степени безопасности сотрудников. И в этом всем помогают роботы, которые используются в большинстве отраслей промышленности из-за их способности с высокой точностью выполнять сложные повторяющиеся задачи даже в опасных условиях.
Источник: https://desnogorsk.ru
Среди ведущих производителей роботов-манипуляторов такие компании, как: FANUC, KUKA, HANWHA; также для производства и других областей бизнеса интересны коллаборативные модели Universal Robots, а в образовании будет очень полезна продукция UFactory — оптимальный набор оборудования этих и других производителей для любых целей можно подобрать со специалистами Top 3D Shop. Подробнее о роботах-манипуляторах читайте далее.
Подробнее о роботах-манипуляторах читайте далее.
Обзор применения
Источник: https://wikipedia.org
Роботы-манипуляторы можно разделить по областям их применения в производстве, в порядке убывания их присутствия в промышленности:
Автомобильная промышленность
Источник: https://technavio.com
Например, завод “Tesla” расположен на участке площадью 464,5 тысячи м2, на нём работает более 160 роботов, причём уровень автоматизации постоянно повышается — роботы устанавливают батареи, сам двигатель, внутренности салона автомобиля, все кабели.
Электротехника и электроника
Источник: https://www.yaskawa.eu.com
Компактный шестиосевой робот-манипулятор Yaskawa Motoman Mh22 собирает жесткий диск компьютера с помощью сменного захвата.
 youtube.com/embed/ym64NFCWORY”/>
youtube.com/embed/ym64NFCWORY”/>
Металлообработка, машиностроение
Источник: https://www.kuka.com
Шлифовка и финишная обработка фрезерованных формовочных инструментов, например, штампов для кузовных деталей, форм для деталей из композитных материалов и форм для литья пластиковых деталей под давлением.
Химическая промышленность
Источник: https://robohub.org
Kawasaki Heavy Industries разработала первого в мире робота из нержавеющей стали с семью степенями свободы. Он будет использоваться в области обнаружения наркотиков и в химической промышленности для автоматизации экспериментов, в которых используются опасные вещества. Благодаря корпусу из нержавеющей стали его можно стерилизовать с помощью перекиси водорода.
Медицина и фармацевтика
Источник: https://www. kuka.com
kuka.com
KUKA LBR Med – роботизированная инновация для медицины. Он основан на чувствительном легком роботе LBR iiwa. Благодаря своим сенсорным возможностям для обеспечения безопасности, быстрому обучению и простому управлению оператором, он применим в качестве помощника в операционной.
LBR Med чрезвычайно чувствительный. Благодаря датчикам крутящего момента в суставе, робот аккуратно касается пациента, при прикосновении врача автоматически отодвигается в сторону. С другой стороны, он всегда готов помочь в сложных манипуляциях. Благодаря специальному биосовместимому покрытию робот обеспечивает абсолютную стерильность рабочей поверхности.
Продовольствие и сельское хозяйство
Источник: https://indicator.ru
Система «Vegebot» для автономного сбора урожая салата включает в себя портативный компьютер с управляющим программным обеспечением, стандартный робот-манипулятор UR10 с шестью степенями свободы (DOF), две камеры и настраиваемую под тип овощей «руку», размещенные на мобильной платформе.
Образование
Источник: https://education.lego.com
LEGO Mindstorms – это хорошо проработанная серия инструментов для изучения робототехники. Широкие возможности набора и простота сборки позволяют провести полный урок робототехники (введение, сборка, программирование и тестирование) за удивительно короткое время.
Иные области
Источник: https://www.jerusalemhouseministries.net
Корпус морской пехоты США находится в процессе развертывания сверхлегкого робота «Usmc Eod Robot» – небольшой мобильной роботизированной системы, которая позволяет морским пехотинцам обезвреживать взрывоопасные боеприпасы (EOD) и разминировать самодельные взрывные устройства. Устройство может использовать свои «руки» для подъема на небольшие препятствия, такие как лестницы.
Как выбрать
При выборе роботов-манипуляторов для вашего производства следует обратить внимание на следующие параметры:
- назначение
- форм-фактор, вес, электрические параметры
- количество и размеры «рук», радиус действия, число степеней свободы
- грузоподъемность
- повторяемость траектории и статическая повторяемость
- условия эксплуатации
Типы роботов-манипуляторов
Источник: https://www.nasa.gov
Какой-то единой классификации роботов-манипуляторов не существует. Можно говорить об устоявшемся на рынке разделении по ряду параметров.
По типу монтажа роботов
Стационарные
Источник: https://www.symmetrymagazine.org
Наиболее распространенный на рынке тип манипуляторов. Возможен любой тип крепления, например, напольный, потолочный или настенный. Обладают высокой грузоподъёмностью при широком радиусе действия, большом числе степеней свободы и универсальностью.
Обладают высокой грузоподъёмностью при широком радиусе действия, большом числе степеней свободы и универсальностью.
Мобильные
Источник: https://www.symmetrymagazine.org
Такие роботы не связаны с каким-то конкретным местом установки и могут выполнять задачи как в любой точке производства, так и на значительном удалении от него. Мобильные манипуляторы могут иметь как постоянное питание, так и автономное. Возможно всепогодное или подводное исполнение устройств и эксплуатация в жестких или опасных условиях, например, для разминирования. Манипуляторы такого типа имеют малую массу и физические размеры, могут быть компактно уложены для транспортировки, рассчитаны на столкновения с препятствиями и переворачивания. Зачастую, такие роботы оснащаются системами искусственного интеллекта. К их недостаткам можно отнести высокую стоимость и малую полезную нагрузку (хотя есть и исключения).
Вертикальные (крепление на пол или потолок)
Источник: https://www. virtualmarket.innotrans.de
virtualmarket.innotrans.de
Всякий раз, когда пространство ограничено, вы можете использовать 7-миосевой робот Blastman в варианте для настенного монтажа. При необходимости, вы можете установить двух роботов, работающих на противоположных стенах. Основные движения настенных роботов – продольные и вертикальные. Размеры и конструкция могут быть подобраны в соответствии потребностями клиента.
Горизонтальные (портальные)
Источник: http://www.directindustry.com
Это демонстрация работы портального манипулятора ABB 6620LX, обслуживающего несколько станков. Длина трасса для робота может составлять до 27 метров. Когда вам нужно гибкое обслуживание для 3 или более машин – это наиболее экономичное решение.
По типу применения
По типу применения роботы делятся на автономных, работающих по заданной программе без участия человека, коллаборативных, работающих вместе с человеком и управляемых непосредственно оператором.
С ручным управлением
Источник: https://www.kuka.com
Благодаря своей чувствительности, KUKA LBR iiwa может собирать гибкие детали совместно с человеком или независимо.
Программируемые (автономные)
Источник: http://www.directindustry.com
Yaskawa Motoman — уникальный компактный 7-осевой робот оптимален для использования в производстве автомобилей. Манипулятор может располагаться в непосредственной близости от обрабатываемых объектов и других роботов, что позволяет создавать гибкие производственные линии с высокой плотностью размещения. Использование данного устройства сократит размеры производственной линии и уменьшит время сварки.
Коллаборативные роботы или коботы
Источник: https://blog. robotiq.com
robotiq.com
Кобот — предназначенный для взаимодействия с людьми в общем рабочем пространстве. К такого типа устройствам предъявляются повышенные требования безопасности конструкции и ПО, подразумевающие невозможность нанесения человеку травмы.
По функционалу (зависимости от выполняемых функций):
Пайка и сварка
Источник: https://www.santanderpyme.com.mx
Сварочные роботы сочетают беспрецедентное качество сварных швов с невероятной стабильностью дуги при очень низком токе и при очень высоких скоростях сварки.
Параметры дуги, управляемые компьютером, позволяют задавать оптимальные условия сварки по длине сварного шва, снижая напряжение при нагреве сварочной пластины во время цикла сварки. Сварочные роботы зачастую оснащаются вращающимся столом, позволяющим выполнять сварку деталей в любом положении.
Обработка материалов
Источник: https://www. kuka.com
kuka.com
Ударная обработка сглаживает фрезерованные поверхности, укрепляет структуру материала и равномерно распределяет внутренние напряжения. Ударная обработка позволяет получить гладкость поверхности около 0,1 мкм, что было бы невозможным при помощи одного лишь фрезерования. За счет холодной ковки повышение твердости материала может достигать 30 процентов. Зачастую можно полностью отказаться от дополнительной обработки поверхности. Автоматизированный процесс ударной обработки замещает ручные операции шлифования и полировки.
Сборка и разборка
Источник: https://www.dreamstime.com
Роботы-манипуляторы используются при производственной сборке изделий любого размера.
При работе с крупногабаритными деталями роботы, за счет исключения человеческого труда, ускоряют производственный процесс и позволяют избежать применения дополнительных грузоподъемных механизмов. При производстве мелких изделий существенно увеличивают скорость, точность и качество работ.
Очистка, покраска и дозирование
Источник: https://phys.org
Для удаления старой краски или нанесения новой обычно требуется команда из нескольких человек. Робот-манипулятор, который может очищать внешние поверхности с помощью струи воды под высоким давлением или пескоструйной обработки, и наносить новые слои краски требует максимум одного оператора. В случае, когда обработка производится в промышленных условиях, один оператор может контролировать сразу целый робототехнический комплекс. В отличие от человека, с роботом вы можете быть уверены, что краска будет нанесена строго в соответствии с требуемой технологией и идеально ровно.
Фрезерование и шлифование
Источник: https://www.welt.de
Простая и гибкая автоматизированная фрезеровочная установка, расположенная на небольшой площади, сочетает идеальную точность фрезеровочного и шлифовочного станков с подвижностью 6-осевого манипулятора.
Резка и обработка
Источник: https://www. parkindustries.com
parkindustries.com
Резка и обработка любого материала является весьма травмоопасной работой для человека. Роботы-манипуляторы лишены этого и многих других человеческих недостатков, кроме того, они способны выполнять эту работу с высочайшей точностью, минимизируя потери материала и сокращая время обработки.
Строительные
Источник: https://www.fbr.com.au
Такие манипуляторы могут строить объекты с высокой степенью точности, сократив до минимума потери кирпича и работать 24 часа в сутки в любую погоду, не останавливаясь для высыхания раствора, поскольку используют специальный полимерный клей вместо цементного раствора.
Другие
Источник: https://www.theengineer.co.uk
Перечислить все сферы, где могут применяться роботы-манипуляторы, попросту невозможно. Но одно можно с уверенностью сказать уже прямо сейчас: нет таких сфер нашей жизни, где использование роботов было бы невозможно. Например, этот медицинский робот успешно провел операцию на глазу 70-тилетнего пациента через разрез в 1 мм.
Например, этот медицинский робот успешно провел операцию на глазу 70-тилетнего пациента через разрез в 1 мм.
Исходя из полезной нагрузки
0-20 кг
Источник: https://abb.com
Компактные, высокоскоростные и высокоточные промышленные роботы с небольшими грузоподъемностью и рабочей зоной – эффективное, надежное, бюджетное и быстро окупающееся решение. Зачастую имеют версии для работы в чистых помещениях Clean Room ISO 5 (Class 100).
20-80 кг
Источник: https://abb.com
Высокопроизводительные роботы общего назначения, оптимизированные для повторяющихся быстрых операций. Роботы такого типа позволяют создавать более компактные производственные цеха с повышенной плотностью монтажа устройств и при неизменно высоком качестве работы.
80-300 кг
Источник: https://abb.com
Предназначены для суровых условий производства, которые могут быть слишком жесткими для стандартных роботов и оборудования. Роботов такого типа отличает уменьшенный износ, высокая надёжность, простота настройки и управления, увеличенные интервалы профилактического обслуживания.
Роботов такого типа отличает уменьшенный износ, высокая надёжность, простота настройки и управления, увеличенные интервалы профилактического обслуживания.
300-1000 кг
Источник: https://abb.com
Идеально подходят для тяжелых условий эксплуатации независимо от отрасли. Типичные области применения включают в себя работу с тяжелыми приспособлениями и объектами, поворот кузовов автомобилей, операции с деталями в литейном или кузнечном цехах, погрузку и разгрузку машин, перемещение грузов на складах.
1000-3000 кг
Источник: https://www.fanucamerica.com
Эти настоящие исполины легко и быстро управляются с самыми тяжелыми грузами. Могут использоваться на погрузо-разгрузочных работах, перемещая с высокой точностью самые тяжелые детали машин, судов или локомотивов. Широкий набор рабочих инструментов позволяет добиться высокой эффективности за разумную стоимость.
другие нагрузки
 youtube.com/embed/J_8OnDsQVZE”/>
youtube.com/embed/J_8OnDsQVZE”/>
Кейсы применения
Применение дельта-роботов в производстве оладьев
Источник: http://www.abb.com
Высокоскоростная автоматизированная укладка оладьев (450 штук в минуту) на фабрике «Honeytop Speciality Foods Ltd.» с помощью роботов ABB IRB 360 FlexPicker. Использование машин позволило на 20% увеличить скорость укладки даже по сравнению с лучшими работниками, существенно сократить время упаковки, увеличить безопасность на производстве, сократить рабочую площадь, уменьшить потери продукции и увеличить доходность бизнеса.
Обратите внимание, как аккуратно робот раскладывает оладьи, упавшие друг на друга – это работа интегрированной с роботом системы распознавания образов.
Гибкость программирования позволяет произвольным образом менять количество оладьев в упаковке.
Применение робота-манипулятора для сложной сварки внутри трубы
Источник: https://www. ljwelding.com
ljwelding.com
Задача:
С продавцом труб в Мексике был заключен контракт, который требовал несколько процессов сварки. Во-первых, необходимо было сделать сварные перегородки вдоль внутреннего длинного шва трубы диаметром 46 см до 5 метров в длину. Сварка перегородки внутри трубы вручную, с работником в ограниченном пространстве, была трудоемкой, неудобной и небезопасной для работника. Заказчику также потребовался процесс дуговой сварки для наружных кольцевых сварных швов. Наконец, у него было ограниченное время и строгий бюджет, поэтому он заказал спроектировать и построить сварочный манипулятор MIG+SAW с обеими функциями, встроенными в одну машину.
Решение
Индивидуальный дизайн и проектирование, включая специально разработанную систему MIG с узкой головкой и сварочной камерой.
Средства управления для интеграции SAW+MIG, систему камер, колонного и стрелового манипуляторов. Результатом стала единая панель управления, в которую были включены все необходимые функции.
Технические характеристики оборудования:
- специализированная колонна и штанга с выдвижной мачтой;
- один конец штанги оборудован сварочным манипулятором с системой вспомогательной дуги, которая дополнена подачей и ликвидацией лишнего флюса;
- противоположный конец манипулятора CaB оснащен специально разработанной системой сварки MIG с узкой головкой и камерой для дуговой сварки.
Источник: https://www.ljwelding.com
Результат
Заказчику не требуются две отдельные станции для сварки.
Благодаря специализированной системе MIG с узкой головкой, больше не требуется отправлять сварщика в замкнутое пространство, и вся сварка может выполняться с наружной стороны детали. Сварка производится в автоматическом режиме.
Круглые наружные сварные швы, выполненные с помощью дуговой системы, имеют более высокое качество и более прочный сварной шов, чем «ручные» сварочные швы MIG или TIG.
Применение роботизированного комплекса точечной сварки корпусов автомобилей в концерне Volvo
Задачи:
- Увеличить производительность “Volvo cars”, улучшить качество продукции.
- Увеличить гибкость производственных линий для выпуска различных новых моделей.
- Уменьшить занимаемую площадь, сократить ручной труд, увеличить безопасность труда.
- Оптимизировать жизненный цикл оборудования.
Результат: Увеличена производительность и время непрерывной работы производственных линий. Сокращено время обслуживания и увеличен срок службы оборудования. Более компактное размещение позволило установить дополнительное оборудование. Минимизировано участие людей в производстве, что позволило сократить как расходы на заработную плату, так и риски несчастных случаев.
За 2018 год «Volvo Cars» зафиксировала существенный рост выручки — на 21% по сравнению с предыдущим годом.
Применение робота-манипулятора для вырезания фигуры из пенополистирола
Источник: http://specialpatterns.com.au
Робототехническая система для создания моделей из вспененного пенополистирола для компании “Special Patterns” из Австралии. В качестве инструментов используется горячая проволока и фрезерование, с удалением пыли вокруг места работы. Робот KUKA KR120 AA с контроллером KUKA.CNC.
Роботы-распылители и международный проект ИТЭР
Источник: https://habr.com
Задача: нанести медное покрытие на плоские контактные поверхности электрических алюминиевых шин для международного проекта ITER (Международный термоядерный экспериментальный реактор).
Как это было сделано: ООО “Acton” построило роботизированный комплекс, состоящий из контроллера OWEN, камеры распыления, робота Kawasaki RS006L и контроллера Kawasaki E01.
Рекомендуемое оборудование, примеры
Роборука uArm Swift Pro
Для знакомства с робототехникой и обучения работе с ней будущих операторов и программистов.
Источник: https://newatlas.com
Компания UFactory представила новую роботизированную руку uArm Swift Pro, которая может стать отличным помощником в быту для выполнения совершенно разных задач, а также для людей с ограниченными возможностями. В отличие от многих подобных мини-роботов, данная модель отличается приемлемой ценой, что, несомненно, является большим преимуществом при выборе подобных роботов.
В базовой комплектации uArm Swift Pro оборудован присоской. Дополнительно можно установить различные захваты, головку для 3D печати, камеру или лазер для гравировки.
Модель двигается плавно, обладает высокой точностью и повторяемостью до 0.2 мм, что идеально подходит для рисования, лазерной гравировки и 3D печати.
Hanwha – коллаборативный робот
Источник: https://www.hycobot.com
Коллаборативный робот, собрать которого, благодаря модульной конструкции, сможет собрать даже школьник. Работать с ним так же просто, как использовать смартфон. При желании, оператор может вручную переместить робота в нужное положение и позволить ему запомнить новое движение. Такая функция прямого обучения позволяет даже неопытным операторам заставить робота выполнять задание. Тем не менее, это полноценное производственное оборудование с соответствующими ресурсом и точностью.
Один блок управления может управлять двумя роботами одновременно, что снижает первоначальные затраты. Модуль ввода-вывода и гнездо EtherCAT, расположенные на корпусе робота, позволяют легко подключать различные периферийные устройства, такие как захват, оптический датчик и другие.
Модуль ввода-вывода и гнездо EtherCAT, расположенные на корпусе робота, позволяют легко подключать различные периферийные устройства, такие как захват, оптический датчик и другие.
Ознакомьтесь на сайте с большим ассортиментом роботов для любого производства.
Выводы
Автоматизация производств с помощью робототехники ведет к повышению производительности и рентабельности, что уже неоднократно показано во множестве источников, в том числе на страницах нашего блога.
Роботы-манипуляторы FANUC, KUKA, HANWHA, Universal Robots, UFactory и других производителей применяются в модернизации предприятий большинства отраслей. Оптимальный набор оборудования этих и других производителей для любых целей можно подобрать со специалистами Top 3D Shop.
Подписывайтесь на наш телеграм-канал с отборными кейсами Роботизации и Автоматизации со всех уголков мира:
https://tglink. ru/easy_robotics
ru/easy_robotics
Узнайте больше о возможностях усовершенствовать ваше производство интеграцией нового оборудования:
Шарнирные роботы-манипуляторы: описание, принцип работы и применение
Роботизированные системы нового поколения помогают значительно улучшить качество работы и повысить скорость выполнения технологических операций. Внедрение робототехники позволяет исключить человеческий фактор и повысить безопасность на производстве. Интеграция усовершенствованных технологий и современных устройств содействует увеличению объемов производства, имеет большую выгоду в долгосрочной перспективе.
Шарнирные роботы позволяют эффективно выполнять различные производственные задачи, которые связаны с контурной сваркой, фрезеровкой, упаковкой, укладкой. Их отличительной особенностью является то, что они могут эффективно функционировать и перемещаться на объектах со сложной траекторией. Роботизированная техника помогает оптимизировать рабочий процесс, в разы ускорить производственные задачи и операции. Промышленная робототехника имеет преимущества по сравнению с ручным трудом и полуавтоматическими системами.
Роботизированная техника помогает оптимизировать рабочий процесс, в разы ускорить производственные задачи и операции. Промышленная робототехника имеет преимущества по сравнению с ручным трудом и полуавтоматическими системами.
Шарнирные манипуляторы и их принцип работы
Робототехника отличается высокой производительностью, надежностью и функциональностью. Представленное устройство имеет от 4 до 6 управляемых осей. Состоит обычно из нескольких звеньев. На конце устройства имеется рабочий орган. В целях приведения в движения устройства используются электрические, гидравлические и пневматические приводы. Гидравлические приводы промышленных роботов имеют лучшие показатели быстродействия и производительности.
В качестве рабочего органа используется специальный захватный элемент или технологический инструмент. Современные модели могут комплектоваться пневматическими присосками и другими устройствами, необходимыми для выполнения данной задачи. В среднем радиус действия роботизированной техники данной модификации может достигать несколько метров, а показатели грузоподъемности достигать более 1 тонны.
Сфера применения шарнирно-балансирных манипуляторов
- Выполнение различных лакокрасочных работ.
- Паллетирование и депаллетизация.
- Технологические операции, которые связаны с точечной или же дуговой сваркой.
- Шлифование и фрезерование различных заготовок и деталей.
- Перемещение деталей, сборка и многое другое.
Роботизированная техника также используется для механической обработки деталей, сборки готовой продукции, перемещения материалов. Максимальная точность позиционирования достигается благодаря встроенному программному обеспечению и технологии технического зрения.
Современные модели незаменимы при автоматизации монотонной работы, которая связана, например, с сортировкой различных деталей и заготовок. Манипуляторы также необходимы при выполнении операций в опасной рабочей зоне, где, к примеру, разбрызгивается охлаждающая жидкость. Внедрение роботов для перемещения позволяет повысить уровень безопасности на особо опасных участках и исключить травматизм.
Особенности использования шарнирной робототехники
Робототехника значительно облегчает автоматизацию, визуальное распознавание различных элементов освобождает от ограничений механической подачи. Система помогает осуществлять настройку, что устраняет необходимость в ручной калибровке при подаче различных заготовок.
Современные роботы для перемещения грузов прекрасно подходят для объектов и рабочих зон со сложной криволинейной траекторией, которая постоянно меняется. Следует подчеркнуть, что шарнирные роботы для перемещения объектов более универсальны в отличие от портальной робототехники. Система обычно разрабатывается под конкретные рабочие условия. Монтирование устройства можно осуществлять как на пол, так на стену и потолок в зависимости от поставленных задач производственного учреждения.
Внедрение промышленной робототехники шарнирного типа обеспечивает гибкость и возможность переобустройства оборудования для выполнения других целей и задач. Портальные устройства создаются чаще всего под выполнение конкретной задачи. Роботизация производства позволяет сэкономить время, снизить возможные затраты и исключить человеческий фактор. Усовершенствованные модели могут быть настроены для нескольких продуктов, что позволяет оптимизировать скорость потока и увеличить производительность.
Роботизация производства позволяет сэкономить время, снизить возможные затраты и исключить человеческий фактор. Усовершенствованные модели могут быть настроены для нескольких продуктов, что позволяет оптимизировать скорость потока и увеличить производительность.
Ведущие преимущества шарнирных роботов-манипуляторов
- Высокая универсальность. Возможен большой выбор рабочих органов, что позволяет задействовать устройство с вращательными кинематическими парами для различных целей и задач.
- Наилучшие показатели производительности. Роботизированная техника обеспечивает высокую точность и скорость выполнения тех или иных операций.
- Гибкие возможности установки. Все модификации робототехники могут быть установлены на различной поверхности, на полу, стене исходя из технологических задач.
- Многофункциональность, надежность. Система может быть подключена к компьютеру, что позволит с легкостью производить необходимые настройки.

- Умная техника. Неоспоримым преимуществом роботизированных устройств является встроенная функция технического зрения, которая позволяет распознавать различные заготовки и детали, что значительно повышает качество и точность выполняемых работ.

Среди дополнительных достоинств можно выделить модульный подход, экономичность и малый вес конструкции. Окупаемость инвестиции составляет 1,5-2 года и зависит от системы управления и других технических показателей. Система нуждается в минимальном обслуживании, работает стабильно и бесперебойно.
Шарнирные роботы Omron обеспечивают наиболее точную обработку, сборку и перемещение заготовок, деталей и материалов. Встроенная система технического зрения позволяет оперативно выполнять технологические задачи. Роботизация производственных процессов – это гарантия повышения производительности и безопасности на производстве.
КАКОЙ АБСОЛЮТНЫЙ МАНИПУЛЯТОР | Hexagon Manufacturing Intelligence
Новый манипулятор Absolute Arm выпускается в трех моделях, с тремя уровнями точности и в семи типоразмерах, которые вместе способны предложить до 36 различных конфигураций, любая из которых может наилучшим образом подходить для вашего конкретного случая. Итак, каким будет ваш правильный выбор?
Итак, каким будет ваш правильный выбор?
Модель Absolute Arm с 6 осями предназначена для тех, кому требуется способность полноразмерного шарнирного измерительного манипулятора проникать в труднодоступные места, а также тем, кто ориентирован на контактные измерения, измерения отдельных точек с очень высокой точностью.
Манипулятор Absolute Arm Compact является самым точным и самым компактным измерительным манипулятором в мире. Он предназначен для тех, кому нужно измерять мелкие детали с высокой точностью в условиях действующего производства: на рабочем столе или непосредственно на станке с ЧПУ.
Серии
Манипуляторы 83 серии способны обеспечить точность измерения начального уровня и великолепно подходят для пользователей, имеющих только базовые требования к метрологии.
Манипуляторы 85 серии имеют превосходное соотношение стоимости и точности измерения; они являются нашим бестселлером на всех основных рынках.
Манипуляторы 87 серии являются наилучшим решением задач портативных измерений высокого класса, а также просто наилучшим портативным измерительным манипулятором из числа доступных на сегодняшний день.
Типоразмеры
Наши манипуляторы Absolute Arms выпускаются в семи типоразмерах. Самый маленький, имеющий измерительный объем 1,2 метра — манипулятор Absolute Arm Compact. Полноразмерные системы абсолютных манипуляторов имеют измерительный объем диаметром 2,0, 2,5, 3,0, 3,5, 4,0 и 4,5 метров.
Важно помнить, что типоразмеры наших моделей соответствуют максимальному измерительному объему, мы рекомендуем конкретный манипулятор как пригодный для измерения внутри этого объема. Действительный максимальный диапазон измерения этих манипуляторов обычно на 10-15 процентов больше. При сравнении манипуляторов одинакового размера убедитесь, что они действительно имеют одинаковый размер по одному стандарту.
При сравнении манипуляторов одинакового размера убедитесь, что они действительно имеют одинаковый размер по одному стандарту.
Манипуляторы для работы в сверхвысоком вакууме
Оглавление:
Z-осевой манипулятор серии LTM.
Z-осевые манипуляторы LTM с широким отверстием.
Miniax XYZ манипулятор.
Модуль перемещения по осям XY Transax.
Платформа двунаправленного перемещения Omniax XY.
Шарнирные манипуляторы серии WS.
Z-осевой манипулятор серии LTM.
Манипулятор обеспечивает движение по оси Z образцов и датчиков диаметром до 38 мм с высокой точностью и стабильностью в условиях сверхвысокого вакуума. Возможны варианты исполнения с ручным и автоматическим приводами.
Описание:
Отверстие диаметром 38 мм.
Диапазон перемещений от 25 до 150 мм.
Шкала с шагом 1 мм.
Нагрев до 250 оС (без двигателя).
Диапазон рабочих температур -20 оС до 200 оС.
Резьбовые фланцы М6.
Стопоры на крайних точках движения.
При оснащении двигателями точность позиционирования до 2,5 микрон.
Концентричность отверстия фланца в пределах 0,5 мм.
Приблизительный крутящий момент, необходимый для подъема 1,2Нм.
Подъем:
- 200Н Максимальная приложенная осевая нагрузка.
- 50Н Максимальная радиальная нагрузка.
Рабочее давление от 1 бар до 10-11 мбар.
Скорость утечки 1×10-10 мбар*л/сек.
| Комплект для смазки | |
| Манипулятор | Артикул комплекта |
| ZLTM серия | ZLUBEK |
| Z-осевой манипулятор серии LTM | |||||
| DN тип | Размер фланца OD, мм | Перемещение | Управление | Нагрев до, оС | Артикул |
| DN40 | 70 | 25 | Ручное | 250 * | ZLTM25 |
| DN40 | 70 | 50 | Ручное | 250 * | ZLTM50 |
| DN40 | 70 | 75 | Ручное | 250 * | ZLTM75 |
| DN40 | 70 | 100 | Ручное | 250 * | ZLTM100 |
| DN40 | 70 | 150 | Ручное | 250 * | ZLTM150 |
| DN40 | 70 | 25 | Шаговый двигатель | 250 * | ZLTM25W |
| DN40 | 70 | 50 | Шаговый двигатель | 250 * | ZLTM50W |
| DN40 | 70 | 75 | Шаговый двигатель | 250 * | ZLTM75W |
| DN40 | 70 | 100 | Шаговый двигатель | 250 * | ZLTM100W |
| DN40 | 70 | 150 | Шаговый двигатель | 250 * | ZLTM150W |
| DN40 | 70 | 25 | Шаговый двигатель с энкодером | 250 * | ZLTM25ME |
| DN40 | 70 | 50 | Шаговый двигатель с энкодером | 250 * | ZLTM50ME |
| DN40 | 70 | 75 | Шаговый двигатель с энкодером | 250 * | ZLTM75ME |
| DN40 | 70 | 100 | Шаговый двигатель с энкодером | 250 * | ZLTM100ME |
| DN40 | 70 | 150 | Шаговый двигатель с энкодером | 250 * | ZLTM150ME |
| * без двигателей | |||||
Z-осевые манипуляторы LTM с широким отверстием.
Манипулятор обеспечивает движение по оси Z образцов и датчиков диаметром до 68 мм. Сварные швы сильфона обеспечивают минимальное натекание. Для увеличения точности позиционирования объектов в вакуумной системе возможна установка шаговых двигателей под управлением контроллера Sim-Step.
Описание:
Высокая точность и плавность перемещения.
Сильфон с сквозным отверстием 68 мм.
Диапазон перемещений от 25 до 150 мм.
Градуированная шкала с шагом 1 мм.
Диапазон рабочих температур от -20 до 200 оС
Температура отжига 250 оС (со снятыми двигателями и датчиками).
Верхний фланец и резьбой М8, нижний без резьбы.
Стопоры в крайних точках перемещения.
Концевые выключатели поставляются в конфигурации с шаговым двигателем.
Диапазон рабочих давлений от 1 бара до 1*10-11 мбара.
Скорость утечки менее 1*10-10 мбара*л/сек.
| Z-отсевые манипуляторы с LTM с широким отверстием. | ||||||
| DN тип | Перемещение, мм | Управление | Размер А max, мм | Размер А min, мм | Общая высота, мм | Артикул |
| DN63 | 25 | Ручное | 125 | 100 | 253 | ZLTM11425HW |
| DN63 | 50 | Ручное | 150 | 100 | 278 | ZLTM11450HW |
| DN63 | 75 | Ручное | 175 | 100 | 303 | ZLTM11475HW |
| DN63 | 100 | Ручное | 200 | 100 | 328 | ZLTM114100HW |
| DN63 | 150 | Ручное | 250 | 100 | 375 | ZLTM114150HW |
| DN63 | 25 | Шаговый двигатель | 125 | 100 | 307 | ZLTM11425SMS |
| DN63 | 50 | Шаговый двигатель | 150 | 100 | 332 | ZLTM11450SMS |
| DN63 | 75 | Шаговый двигатель | 175 | 100 | 357 | ZLTM11475SMS |
| DN63 | 100 | Шаговый двигатель | 200 | 100 | 382 | ZLTM114100SMS |
| DN63 | 150 | Шаговый двигатель | 250 | 100 | 432 | ZLTM114150SMS |
| DN63 | 25 | Шаговый двигатель с экодером | 125 | 100 | 307 | ZLTM11425MSE |
| DN63 | 50 | Шаговый двигатель с экодером | 150 | 100 | 332 | ZLTM11450MSE |
| DN63 | 75 | Шаговый двигатель с экодером | 175 | 100 | 357 | ZLTM11475MSE |
| DN63 | 100 | Шаговый двигатель с экодером | 200 | 100 | 382 | ZLTM114100MSE |
| DN63 | 150 | Шаговый двигатель с экодером | 250 | 100 | 432 | ZLTM114150SMS |
| DN63 | 25 | Двигатель постоянного тока | 125 | 100 | 407 | ZLTM11425DCSE |
| DN63 | 50 | Двигатель постоянного тока | 150 | 100 | 432 | ZLTM11450DCS |
| DN63 | 75 | Двигатель постоянного тока | 175 | 100 | 457 | ZLTM11475DCS |
| DN63 | 100 | Двигатель постоянного тока | 200 | 100 | 482 | ZLTM114100DCS |
| DN63 | 150 | Двигатель постоянного тока | 250 | 100 | 532 | ZLTM114150DCS |
Miniax XYZ манипулятор.
Манипулятор XYZ Miniax обеспечивает движение в любом направлении образцов и датчиков с высокой точностью и стабильностью в условиях сверхвысокого вакуума. Возможны варианты исполнения с ручного и автоматического привода.
Описание:
Перемещение по осям XY ± 12,5 мм.
Перемещение по оси Z 50 или 100 мм.
Нагрев до 200 оС.
Стандартный базовый фланец имеет наружный диаметр 152 мм (NW100CF).
Четыре мини-порта, предназначены для подключения сервисных вводов.
Подвижный фланец с наружным диаметром 70 мм (NW35CF) с резьбовыми отверстиями M6, расположенные вокруг оси Y.
Дополнительный фланец с наружным диаметром 70 мм (NW35CF).
Двойные отверстия под болты на монтажном фланце.
Рабочее давление от 1 бар до 10-11 мбар.
Скорость утечки 1×10-10 мбар*л/сек.
Разрешение по осям XY 0,001 мм, повторяемость 0,005 мм.
Разрешение Z 0,005 мм, повторяемость 0,010 мм.
Miniax использует один сильфон для движения по осям X, Y и Z. Поперечные роликовые подшипники используются для XY движения. Втулки и направляющие для движения по оси Z.
| Miniax XYZ манипулятор | ||||||
| DN тип | Размер фланца OD, мм | Перемещение по оси Z, мм | Дополнительный фланец, деаметр, мм | Размер А, мм | Размер С, мм | Артикул |
| DN40 | 70 | 50 | Нет | 160-210 | 250 | ZXYZ0570 |
| DN40 | 70 | 100 | Нет | 160–260 | 301 | ZXYZ1070 |
| DN100 | 152 | 50 | 4 * 34 | 160-210 | 250 | ZXYZ0515 |
| DN100 | 152 | 100 | 4 * 34 | 160–260 | 301 | ZXYZ1015 |
Модуль перемещения по осям XY Transax.
Модуль Transax XY выполнен в виде отдельного одностороннего сварного сильфона, который совместим с механизмами линейного перемещения Transax по оси Z и вращающимися платформами, такими как RP100, что позволяет создавать полный манипулятор образца, комбинируя эти модули вместе.
Описание:
Перемещение по осям X и Y ± 25 мм.
Отверстие диаметром 54 мм для крепления датчиков или образцов.
Двойные отверстия под болты на монтажном фланце.
Микрометры с ценой градуса 5 микрон в стандартной комплектации.
Возможен вариант поставки с шаговыми двигателями и концевыми выключателями.
Возможен вариант поставки шаговыми двигателями и энкодерами
Рабочее давление от 1 бар до 10-11 мбар.
Скорость утечки 1×10-10 мбар*л/сек.
Нагрев до 230 оС.
Ручное управление:
Точность 10 микрон.
Повторяемость 10 микрон.
Шаговые двигатели:
Точность 0,5 микрон.
Повторяемость 0,5 микрон.
Максимальная скорость 4 мм/сек.
| XY Transax модули и аксессуары | |
| Модуль XY с базовым фланцем 152 мм | Артикул |
| ± 0 адаптер | ZT000A6S |
| ± 12,5 модуль | ZT208A6-12.5 |
| ± 25,0 модуль | ZT208A6S |
| XY Двигатели | Артикул |
| X и Y шаговые двигатели * | MTXYMOTW * |
| X и Y шаговые двигатели с энкодерами * | MTXYMOTE * |
| Модули горизонтальной стабилизации | Артикул |
| Модуль горизонтальной стабилизации | MHSA |
| Компенсационный модуль (только для оси Z) | ZTRS |
| * Входят в наборы автоматизации | |
Платформа двунаправленного перемещения Omniax XY.
Платформа Omniax XY предназначена для линейного перемещения по двум направлениям образца в вакуумной системе в условиях высокого и сверхвысокого вакуума. Платформа совместима с механизмами линейного перемещения Omniax Z и вращающимися платформами, такими как RP100, что позволяет создавать полный манипулятор образца, сочетая эти модули.
Модуль Omniax XY выполнен в виде отдельного одностороннего сварного сильфонного модуля,
Описание:
Сварные сильфонные швы высокой точности.
Перемещение ±25 мм по осям X и Y.
Отверстие диаметром 54 мм на платформе перемещения.
Двойные отверстия под болты на монтажном фланце.
Шкалы перемещения с градуировкой 5 микрон.
Микрометры в стандартной комплектации.
Возможна оснащение шаговыми двигателями с концевыми выключателями.
Возможно оснащение линейными энкодером для точного позиционирования объекта в вакууме.
Рабочий режим до температуры 250°C.
Диапазон давлений от 1 бара до 1*10-11 мбар.
Скорость утечки менее 1*10-10 мбар. *л./сек.
| Omniax XY – основные размеры | ||||
| XY перемещение, мм | Базовый код XY | А2, мм | Диаметр отверстия D, мм | Опорная труба, мм |
| ±25.0 | Т211-12,5 | 175 | 108 | 28 или 54 |
| ±25.0 | Т211 | 175 | 108 | 28 или 54 |
| Omniax XY – модули и аксессуары | ||
| Базовый фланец | Диапазон перемещений | Артикул |
| NW100CF(6”” OD) | Только Z ±0мм | MT000B6S |
| NW100CF(6”” OD) | ±12.5 mm | MT211B6-12.5 |
| NW100CF(6”” OD) | ±25.0 mm | MT211B6S |
| NW150CF (8”” OD) | Только Z ±0мм | ZT000B8S |
| NW150CF (8”” OD) | ±12.5 mm | ZT211B8-12.5 |
| NW150CF(8”” OD) | ±12.5 mm | ZT211B8S |
| Omniax XY – двигатели автоматического перемещения | |
| Модуль двигателя | Артикул |
| X Шаговый двигатель поворота | MTXYMOTW* |
| Y Шаговый двигатель поворота c энкодером | MTXYMOTE* |
| Комплекты для одной оси | |
Ручное перемещение:
Точность 10 микрон
Повторяемость 10 микрон
Шаговые двигатели:
Точность 0,5 микрона
Повторяемость 0,5 микрон
Максимальная скорость перемещения 4 мм/сек
Шарнирные манипуляторы серии WS.
Манипулятор серии WS использует гибкий сильфон для обеспечения перемещения в условиях высокого и сверхвысокого вакуума.
Описание:
Линейное перемещение от 80 до 280 мм.
Угловое перемещение ± 22о.
Двойной сварной сильфон.
Наружный монтажный фланец 70 мм.
Скорость утечки менее 1x 10-10 мбар*л./сек.
Диапазон давления от 1 бар до 10-11 мбар.
Конструкция из нержавеющей стали.
DN тип – DN40
Наружный монтажный фланец 70 мм.
Монтажный фланец 34 мм.
Угловое перемещение ± 22о.
Диаметр отверстия 3,6 мм
Тип – универсальный.
| Шарнирные манипуляторы серии WS — размеры | |||||
| Линейное перемещение, мм | Размер А, мм выдвинутое положение | Размер B, мм задвинутое положение | Размер C, мм задвинутое положение | Размер D, мм выдвинутое положение | Артикул |
| 80 | 139 | 159 | 59 | 79 | ZWS075 |
| 151 | 210 | 259 | 59 | 108 | ZWS150 |
| 237 | 296 | 381 | 59 | 144 | ZWS225 |
| 280 | 339 | 442 | 59 | 162 | ZWS275 |
PARTNER EQUO-DALMEC-Промышленные манипуляторы и погрузочно-разгрузочные работы
Максимальная грузоподъемность: 550 кг
Макс.рабочий радиус : 4000 мм
Макс.скорость вертикального подъема : 0,5 м / сек
Вертикальный подъем : 2450 мм
Система управления : исключительно пневматическая
Подача : фильтрованный сжатый воздух (40 мкм), без смазки
Рабочее давление : 0,7 ÷ 0,8 МПа
Рабочая температура : от + 0 ° до + 45 ° C
Уровень шума : <70 дБ Потребление : от 50 Нл ÷ 200 Нл за рабочий цикл
Обороты: – постоянные 360 ° на колонне и оси инструмента
– 300 ° на промежуточной оси
Скачать каталог в pdf Partner_pe_ru
ПРОМЫШЛЕННЫЙ МАНИПУЛЯТОР PARTNER EQUO СО ИЗДЕЛИЯМИ
Пневматический манипулятор PARTNER EQUOс шарнирно-сочлененными рычагами, оснащенный специальными захватными приспособлениями, подходит для работы с промышленными изделиями, имеющими смещение центра масс по сравнению с вертикальной осью рычага манипулятора.Его модульная конструкция была спроектирована таким образом, чтобы противостоять скручиванию, возникающему в результате этого напряжения. Кроме того, имея возможность изменять форму и размеры клеммного рычага в соответствии с требованиями, манипулятор Partner PE может использоваться в особенно узких условиях.
ЭКСПЛУАТАЦИЯ
Пневматический цилиндр, питаемый сжатым воздухом, в сочетании с системой рычагов трансмиссии обеспечивает балансировку приложенной нагрузки.
Усилие цилиндра регулируется двумя специально расположенными пневматическими контурами: первый поддерживает баланс веса системы захвата; второй удерживает вес груза всегда сбалансированным.
Оператор может изменять уровень нагрузки, прикладывая минимальное усилие к захватному инструменту или непосредственно к грузу.
СИСТЕМЫ БАЛАНСИРОВКИ
Preselector
Позволяет быстро настроить эффект балансировки нагрузки в случае изменения веса.
Рычаг подъема / опускания
Он позволяет поднимать и перемещать груз быстро, точно и линейно, без каких-либо регулировок, просто с помощью рычага управления.
Рычажная кнопка
Позволяет балансировать нагрузку с помощью пневматической кнопки после подъема груза с помощью рычага управления.
Автоматический
Позволяет автоматически балансировать нагрузку без какой-либо регулировки после простого действия захвата с помощью соответствующих элементов управления.
Понимание ручных манипуляций | Обезболивание | Колледж-Парк, Мэриленд
Мануальные манипуляции, также называемые мануальной терапией, представляют собой особую форму физиотерапии.Руководство происходит от латинского слова «manus», что означает руки. Эта этимология подсказывает вам, что этот метод использует собственные руки вашего терапевта для управления вашим состоянием. Мануальные манипуляции лучше всего работают в качестве дополнительного лечения к традиционным методам физиотерапии.
Вот как это работает:
Что такое ручное управление?
Мануальные манипуляции – это специализированная форма физического лечения, часто используемая в сочетании с обычными методами физиотерапии.В то время как физиотерапия часто использует устройства, машины или другие методы, мануальные манипуляции в значительной степени связаны с руками вашего терапевта. В Terrapin Care Center мы будем использовать наши руки, чтобы оказывать давление на ваши пораженные мышцы и ткани, а также манипулировать болезненными суставами вашего тела.
Ручные манипуляции в первую очередь направлены на расслабление напряженных мышц и ограниченных суставов. По мере того как ваш физиотерапевт выполняет эту «практическую» технику, вы постепенно почувствуете уменьшение боли и улучшение диапазона движений.Это эффективный способ управлять острой и хронической боли, для тех, с дисковыми грыж, вращающей манжеты травм и других заболеваний опорно-двигательного.
Чем он отличается от массажа?
Мануальные манипуляции и массажная терапия могут показаться похожими. Однако между этими двумя методами есть разница. Мануальная манипуляция включает использование квалифицированных практических приемов для мобилизации мягких тканей, миофасциального высвобождения и многого другого. Цель состоит в том, чтобы оценить, диагностировать или даже лечить основные состояния мышц или суставов.Его также можно использовать в качестве дополнительного лечения к другим вариантам лечения, особенно когда речь идет об увеличении диапазона движений и уменьшении боли.
С другой стороны, массажная терапия направлена на улучшение и поддержание вашего общего благополучия. Хотя он также может облегчить боль, вызванную заболеваниями, он в основном используется для уменьшения стресса и беспокойства. Это также способствует расслаблению, гибкости и лучшему кровообращению.
В Terrapin Care Center мы можем включить в ваш план лечения как мануальные манипуляции, так и массаж.Чтобы узнать больше об этих методах и других эффективных вариантах обезболивания, свяжитесь с нами сегодня по телефону (301) 220-1930. Вы также можете заполнить нашу контактную форму, чтобы назначить встречу. Мы с гордостью обслуживаем жителей Силвер-Спринг, штат Мэриленд, и близлежащих населенных пунктов.
Ручная манипуляция фасада у беременных – Просмотр полного текста
Беременность и роды через естественные родовые пути считаются основными факторами риска повреждения тазового дна различной степени, начиная с легкого стрессового недержания и заканчивая недержанием кала и тазовыми болями. или затруднения мочеиспускания.
Существуют различные способы измерения прочности тазового дна и оценки функциональных проблем. Измеренная сила мышц тазового дна физическим обследованием по Оксфордской шкале оценок (шкала от 0 до 5), а также с помощью устройства перинеометра, оказались одинаково эффективными и хорошо коррелированными. Другие методы, такие как использование поверхностной электромиографии (ЭМГ), которая представляет уровень электрической активности мышц и объем выдоха, а также силу мышц тазового дна, также положительно коррелировали с силой тазового дна.Недавние исследования выявили дисфункцию тазового дна во время беременности, а также в послеродовом периоде с помощью опросника индекса инвалидности тазового дна 20 (PFDI20), утвержденного на иврите.
Существуют обширные знания об эффективности физиотерапии и упражнений для улучшения функции и силы тазового дна, однако для достижения хороших результатов, а также для достижения хороших результатов, а также для достижения хороших результатов, а также для соблюдения режима и настойчивости необходимы продолжительные и непрерывные упражнения. Долгосрочный эффект огромен.
Ручная мобилизация тазового дна – хорошо известный метод лечения.Однако литература о влиянии этой техники немногочисленна. Недавняя серия сообщений о случаях показала немедленное и значительное улучшение дисфункции тазового дна после ручной мобилизации. Послеродовой период имеет решающее значение для функции тазового дна, однако эффективность мануальной терапии в отношении функции и силы тазового дна у беременных женщин не оценивалась. Мы предполагаем, что мануальная терапия может улучшить силу и функцию тазового дна за короткий промежуток времени, и это можно объективно измерить с помощью общепринятых и широко используемых параметров. Целью этого исследования является анализ влияния фасциальной мобилизации тазового дна (PFFM). ) на функцию и силу мышц тазового дна, а также на параметры, на которые предположительно влияет сила тазового дна у беременных
Материалы и методы
Исследование будет включать в себя количество фаз:
Этап первый: скрининг и набор пациентов Женщины, находящиеся под наблюдением в клинике беременных высокого риска в медицинском центре Шиба, которые вынашивают одноплодную беременность в возрасте 20-45 лет и собираются рожать от 2-х до 4-х (первородящие и повторнородящие женщины ) будут исследованы по следующим параметрам: демографические и медицинские данные, целенаправленное интервью для выявления симптомов дисфункции тазового дна, включая мочеиспускание и фекальную функцию, а также боль в области тазового дна, будет проведена ручная оценка в соответствии с Оксфордской шкалой оценок, а также сила тазовое дно, измеренное с помощью перинеометра (комбинированный анальный и вагинальный перинеометр Peritron ‘AV’ НОВАЯ МОДЕЛЬ).Другие параметры, которые будут измеряться, включают: мобилизацию тазово-бедренного сустава, объем форсированного выдоха 1 (ОФВ1) (была показана связь между ОФВ1, внутрибрюшным давлением и силой тазового дна, оценка качества голоса (анализируется врачом-специалистом по коммуникациям). , повторная оценка будет проведена через две недели и через 4 недели, расчетное время оценки – 20 минут) Ожидается участие 80 женщин.
Фаза 2 Женщины, которые будут соответствовать одному или нескольким из следующих параметров, будут зачислены на второй этап исследования.(n = 40)
- Оксфордская шкала оценок ≤ 3/5
- Прочность тазового дна по перинеометру ≤ 30 см / ч 30
- Клинические симптомы недержания мочи, газов или кала
- Боль в тазовом дне, тазобедренном суставе или тазовых суставах
Рандомизация будет выполняться в одну из двух групп:
Группа A – Контрольная группа (n = 20) Группа B – Исследовательская группа (n = 20) Обе группы будут получать рекомендации по упражнениям для укрепления тазового дна.Исследовательская группа будет лечить тазовое дно вручную за два сеанса с интервалом в две недели. Мануальные манипуляции с тазовым дном будут включать внутривлагалищные поверхностные, а также точки давления в области кожи таза. Манипуляция не затрагивает шейку матки или прямую кишку. Каждое занятие длится один час
Обе группы будут оцениваться с помощью ультразвука на предмет кровотока в средней мозговой артерии, пупочной артерии и маточной артерии как часть параметров, которые могут показать пользу для плода из-за мобилизации тазового дна.
Повторная оценка всех женщин и повторное лечение для исследуемой группы будет выполнено через две и четыре недели после первичной оценки.
Исследование будет проводиться в клинике для беременных высокого риска при медицинском центре «Шиба». Женщины будут зачислены добровольно без какой-либо финансовой выгоды.
Что такое ручное управление? | Интегрированные консультанты по боли, Скоттсдейл
18 мая Что такое ручное манипулирование?
Отправлено в 05:00 в хиропрактике по hradminХиропрактик может выполнять мануальные манипуляции, которые также известны как манипуляции с позвоночником или мануальные манипуляции.В Integrated Pain Consultants доктор Вайнберг присоединился к команде, потому что наша клиника стремится предоставить пациентам все возможности для лечения боли, включая множество «альтернативных» и неинвазивных процедур, таких как лечение хиропрактики. Мануальные манипуляции – это очень распространенная терапевтическая техника, применяемая хиропрактиками, и это то, что многие люди представляют, когда думают о встрече с мануальным терапевтом.
Хиропрактики специализируются на позвоночнике, и ручное манипулирование позвонками может помочь исправить неисправность или устранить ненормальные модели движений.Одна из наиболее частых проблем, с которыми справляются ручные манипуляции, – это подвывих или частичный вывих сустава. Подвывих может быть вызван повторяющимися движениями или острой травмой. Иногда эту распространенную проблему могут также вызывать заболевания.
Чего ожидать при ручном манипулировании
Ручные манипуляции могут помочь улучшить общее функционирование, увеличить диапазон движений и снизить нервную возбудимость. Каждый план лечения хиропрактики индивидуален для пациента, поэтому невозможно точно предсказать, чего вы можете ожидать во время сеансов с доктором.Вайнберг. Однако большинство мануальных манипуляций включает укол в позвонок с большой скоростью. Вероятно, вы услышите кавитацию суставов, то есть звук выделения газа. Этот звук возникает, когда газы (углекислый газ, азот и кислород) выделяются из сустава из-за манипуляций мануального терапевта. Большинство клиентов называют это «тресканием» или «растрескиванием» сустава, хотя эта терминология неверна.
Большинство пациентов чувствуют немедленное облегчение после мануальных манипуляций. В редких случаях может ощущаться незначительный дискомфорт, но это временно.Дискомфорт возникает из-за спазмов мышц возле места манипуляции. Важно, чтобы пациенты были относительно расслаблены во время ручных манипуляций, потому что напряжение может затруднить кавитацию. Если вы испытываете этот дискомфорт после лечения, нанесение льда, отдых или массаж и электрическая стимуляция могут предшествовать мануальным манипуляциям.
Зачем нужен мануальный терапевт при кавитации?
Некоторые люди пытаются достичь кавитации самостоятельно или с помощью друга.Это может быть очень опасно. Существует ряд манипулятивных техник, на совершенствование которых хиропрактики тратят много времени, а исправление кавитации требует многолетних тренировок. Это одновременно и высокий уровень мастерства, и искусство. Пациенты нередко регулярно посещают мануального терапевта для «корректировки» (кавитации), даже если они не страдают от острой травмы или повторяющейся стрессовой травмы. Это потому, что процедура может расслабить, улучшить самочувствие и помочь в повседневной деятельности.
Сегодня ручные манипуляции как никогда востребованы благодаря нашему малоподвижному образу жизни.Повторяющиеся стрессовые травмы, такие как частая игра в теннис, безусловно, могут привести к необходимости манипуляции с позвоночником, но то же самое происходит с сидением в течение нескольких часов подряд с плохой осанкой и слабой поддержкой спины. У большинства из нас большую часть времени нет «хорошей» (здоровой) осанки, и это сказывается на теле. Регулярные мануальные манипуляции помогут вылечить позвоночник и сохранить его в хорошем состоянии.
Сравнение ручных и механических манипуляций
Если ручное управление – это хорошо, разве не лучше механическое? Исследователи поддерживают то, что хиропрактики знали в течение многих лет: ответ – решительное нет, и недавние исследования подтверждают это.В статье Journal of Manipulative and Physiological Therapeutics сравниваются два подхода с 92 пациентами хиропрактики. Все пациенты прошли «обычное лечение», как определил их мануальный терапевт. В конце исследования результаты ручных и механических манипуляций были почти идентичными, но с одним ключевым отличием.
Пациенты, перенесшие механические манипуляции, имели двойных посещений кабинета в течение месяца исследования по сравнению с теми, кто подвергался мануальным манипуляциям.Это говорит о том, что для достижения тех же результатов пациентам, подвергающимся механическим манипуляциям, необходимо в два раза чаще посещать мануального терапевта. У немногих есть время, чтобы выбрать двойное количество назначений только для того, чтобы получить те же результаты, что и при половинном количестве назначений с ручной манипуляцией.
Если вы страдаете от боли в пояснице, пора обратиться к мануальному терапевту. Существует множество причин боли в спине, и определение причины вместе с правильным диагнозом – это первый шаг в этом процессе.Могут быть другие варианты помимо лечения и хирургического вмешательства, и комплексные консультанты по боли готовы помочь вам в безопасности. Запланируйте подробное обследование с доктором Вайнбергом, записавшись на прием онлайн или позвонив по телефону (480) 626-2552.
Манипуляторы:: Vulcan Engineering Co.
Представляем телеманипулятор VTS
ИнженерыVulcan объединили ручное управление положением с обратной связью по усилию, чтобы предложить современные полностью гибкие системы роботизированного оборудования.Эта роботизированная технология с дистанционным управлением обеспечивает передовые экономически эффективные решения для решения множества сложных задач в литейном производстве и предлагает явные преимущества по сравнению с современными гидравлическими манипуляторами и специализированными роботизированными ячейками.
Уникальный дизайн и гибкость системы оборудования Vulcan позволяет операторам, не имеющим квалификации в области программирования роботов; использовать весь спектр управления роботизированным оборудованием в полностью ручном и полуавтоматическом режимах. Кроме того, та же самая система оборудования, использующая специальные приспособления, обычное роботизированное программирование и лишь незначительные корректировки, может затем применяться к полностью автоматическим задачам.
В ручном режиме используется скалярное ручное управление движением, позволяющее операторам быстро размещать робота в любом месте в пределах доступного диапазона развертки в области рабочей зоны. Попав в рабочую зону, можно быстро изменить масштаб ручного управления, чтобы обеспечить полное движение руки при одновременном управлении роботами в гораздо меньшем диапазоне. Примером этого преимущества может быть чистовая обработка больших отливок без необходимости использования специальных приспособлений или фиксированной ориентации отливки. Оператор может быстро переместить робота в рабочую зону снятого стояка или ворот, а затем изменить масштаб ручного управления для более точного перемещения в этой ограниченной области.Благодаря обратной связи по усилию, когда оператор направляет шлифовальный круг к литейной поверхности и включает его в контакт, он будет ощущать приложенную силу или сопротивление в своем ручном управлении на протяжении всего процесса.
В полуавтоматическом режиме можно использовать программируемость и отличные возможности отслеживания пути системы оборудования. Операторам может быть предоставлен доступ к множеству предварительно запрограммированных и сохраненных подпрограмм чистовой обработки поверхности для автоматического удаления контактов питателя или отводящего потока. В зависимости от ориентации поверхности и типа требуемой подпрограммы оператор вручную касается ориентированных точек обучения вокруг области, которая должна быть удалена на уровне чистовой поверхности литья, а затем переключает станок в автоматический режим для удаления идентифицированной области.После того, как определенная область была удалена для соответствия указанной поверхности отливки, станок автоматически возвращается в ручной режим и запрашивает следующую операцию. Эта уникальная функция исключает чрезмерную / недостаточную шлифовку из-за человеческого фактора и отклонения, присущие операциям шлифования манипуляторов с участием человека. Дополнительным преимуществом полуавтоматического режима является возможность использования предварительно запрограммированных подпрограмм для «шлифования вне положения», что экономит время и энергию, необходимые для изменения положения отливки для манипулятора или предварительно запрограммированной роботизированной ячейки с использованием приспособлений для определенной ориентации.
Для ручных и полуавтоматических операций система оборудования предназначена для работы из бортовой кабины с контролируемой средой и ударопрочным стеклом, обеспечивающим хорошую видимость и безопасность. Это дает возможность удалить или, по крайней мере, поместить сотрудников в более безопасную и чистую среду по сравнению с нежелательной зоной, где персонал может подвергаться воздействию жарких, грязных условий и опасных окружающих элементов, требующих обширных средств индивидуальной защиты. Преобразование этой суровой среды для сотрудников при выполнении одних и тех же задач может привести к повышению производительности, снижению производственных травм, повышению моральных качеств и снижению текучести кадров.
В полностью автоматическом режиме система оборудования может быть расположена в фиксированной изолированной области, например, перед поворотным столом, и периодически запускать фиксированную программу (ы). В этом случае оператор или обслуживающий робот загружает / выгружает отливки на приспособления на одной стороне поворотного стола, в то время как робот автоматически выполняет фиксированную программу на противоположной стороне.
Независимо от используемого рабочего режима использование системы чувствительности с обратной связью по усилию обеспечивает большой контроль над процессом.Используя в качестве примера операции шлифования, можно использовать регулируемое усилие робота для оптимального удаления металла. Это позволяет сократить время цикла, увеличить срок службы шлифовального круга, а также контролировать выделение тепла на шлифовальной поверхности, что особенно полезно для чистовой обработки термочувствительных литейных сплавов.
Оборудование также разработано для обеспечения гибкости в методике монтажа в зависимости от области применения. Варианты включают фиксированную вертикальную или перевернутую установку, установку направляющей седьмой оси; вертикальный, боковой или перевернутый, переносной монтаж на салазках или подвесной монтаж с мостового крана-штабелера.Для фиксированного или гусеничного монтажа необходимо, чтобы продукт был доставлен или размещен для обработки в зоне захвата оборудования. Переносная конструкция салазок позволяет перемещать оборудование с помощью вилочного погрузчика или мостового крана для одной операции, а затем перемещать между ними или в разные места для выполнения других задач. Это может позволить заранее разместить крупный продукт или рабочую ячейку в одной области, в то время как оборудование работает в соседнем или отдельном месте. Монтажные работы на кране обычно используются для крупногабаритных изделий в расширенных крановых отсеках.Примером применения кранового монтажа может быть чистовая обработка очень больших отливок. Монтаж крана-штабелера позволяет оператору легко размещать систему оборудования в любом месте над крупными отливками или вокруг них, чтобы добраться до участков, недоступных для напольной машины. Это также дает дополнительное преимущество, заключающееся в значительном сокращении или исключении времени обработки материала при перемещении отливок в пределах досягаемости стационарного оборудования. Методы монтажа оборудования могут быть изменены во время или между рабочими сменами в зависимости от эксплуатационных требований.
Многие литейные заводы производят широко изменяющиеся объемы литья для различных производственных линий, и исторически только средние или большие объемы литья были хорошими кандидатами для конкретных автоматизированных приложений, основанных на способности оправдать окупаемость капиталовложений. Используя эту новую систему оборудования, одна машина может предоставить множество возможностей, обеспечивая конкурентное преимущество литейному производству, а также значительно повышая окупаемость инвестиций. Систему оборудования Vulcan можно использовать в одну смену для ручных и / или полуавтоматических задач при разливке малых или средних объемов, а затем в чередующиеся смены для полностью автоматических операций с большими объемами.Этот сценарий также иллюстрирует целевую, полностью гибкую многозадачную конструкцию оборудования, предлагающую улучшенное использование по сравнению с обычно более дорогостоящими специализированными решениями для одной задачи.
Новая технология и система оборудованияVulcan могут применяться во многих типоразмерах. Ручное управление оборудованием не утомляет, им легко научиться и управлять им. Скалярное управление движением, обратная связь по усилию и высокая реакция интуитивно понятны, поэтому предварительные требования к возможностям оператора и обучению снижаются.Операторы оборудования не обязаны изучать программирование роботов; однако они обладают точностью, точностью и производительностью роботизированной системы, помещенной в их руки.
Для шлифовальных работ доступна вся линейка шпинделей Vulcan; от электрического с возможностью автоматической смены инструмента до мощного гидравлического. В зависимости от требований к удалению материала могут использоваться как шлифовальные круги на связке, так и суперабразивные круги, а также их можно менять местами на указанных шпинделях.
В дополнение к описанным преимуществам очистки и отделки отливок существует множество приложений, связанных с погрузочно-разгрузочными работами.Наконец, использование обратной связи по поверхностному контакту и настройки переменного прилагаемого усилия также позволяет выполнять многочисленные квалификационные испытания для более крупных изделий.
CLIP STUDIO PAINT Руководство по эксплуатации
Использование манипуляторов
Вы можете управлять материалами 3D-персонажей с помощью манипулятора.
· Если выбран материал 3D-персонажа, совместимый с версией 1.5, включите [Manipulator] в категории [Preference] палитры деталей вспомогательного инструмента, чтобы отобразить манипуляторы. · Если отображается контроллер анимации, см. «Переключение на отображение манипулятора». |
Вращающиеся детали с манипулятором
С помощью манипулятора можно вращать части материалов 3D-персонажей.
1 Выберите инструмент
На палитре инструментов выберите инструмент [Операция].
2 Выберите вспомогательный инструмент
Откройте палитру вспомогательных инструментов и выберите [Объект].
3 Отображение манипулятора
Щелкните деталь, которую нужно переместить, в материале 3D-персонажа или 3D-чертеже, который редактируется.
4 Переместите конкретную часть
Переместите курсор мыши к манипулятору и перетащите в направлении, в котором нужно переместить деталь.
Наименования частей манипулятора
Манипулятор можно вращать в следующих направлениях.
Некоторые манипуляторы могут не отображаться в зависимости от выбранной части. |
(1) Закрутка (красный)
Перетащите по красному кольцу.Поворачивает выбранную деталь в направлении кольца.
(2) Гибочное вращение (зеленый)
Перетащите по зеленому кольцу. Поворачивает выбранную деталь в направлении кольца.
(3) Гибочное вращение (синий)
Перетащите синее кольцо. Поворачивает выбранную деталь в направлении кольца.
(4) Диапазон перемещения
Отображает диапазон, в котором деталь может быть перемещена. Диапазон перемещения не отображается для материалов 3D-персонажей, совместимых с версией 1.5.
Переключение на дисплей контроллера анимации
Щелкните часть, отображаемую красным, чтобы переключиться на дисплей контроллера анимации.
Контроллер анимации нельзя использовать для материалов 3D-персонажей, совместимых с версией 1.5. |
Мануальная и манипулятивная терапия – физиотерапия Нестора
Откройте для себя естественное и безопасное обезболивающее с помощью мануальной терапии
Мануальная терапия: практический способ лечения боли
Если вы опасаетесь получения мануальной терапии, позвольте нам немного облегчить ваш разум:
Наши физиотерапевты из Северного Смитфилда имеют в своем арсенале несколько инструментов, которые призваны облегчить вашу боль, одновременно улучшая функции вашего тела.
Мы принимаем много пациентов, впервые проходящих физиотерапию, которые думают, что их лечение будет болезненным, неудобным или даже мучительным из-за состояния, в котором они находятся. Однако это совсем не так!
Страдаете ли вы от боли в результате травмы, болезни или хирургической операции? Если это так, то, вероятно, вам будет полезна мануальная физиотерапия. Свяжитесь с Nestor Physical Therapy сегодня, чтобы начать.
Как мануальная терапия поможет мне найти облегчение?
Мануальная терапия – важная часть плана лечения, поскольку она помогает уменьшить боль и отек, минимизировать воспаление и увеличить диапазон движений.
Наши физиотерапевты из Норт-Смитфилда хорошо обучены диагностике и лечению двигательных расстройств, поэтому вы можете найти необходимое облегчение. Эти нарушения часто возникают после операции, особенно если пациенту была проведена полная замена сустава.
Однако многие врачи также прописывают физиотерапевтическое лечение травм, несчастных случаев или болезней – по сути, всего, что заставляет вас чувствовать себя слабым и неспособным функционировать на своем нормальном физическом уровне.
Ваш план лечения, вероятно, будет включать несколько различных методов лечения, направленных на улучшение определенных функций вашего тела. Некоторые упражнения могут быть направлены на улучшение баланса и силы, а другие – на увеличение диапазона движений.
Мануальная терапия определенная
Наши физиотерапевты прошли обширную подготовку по специализированным методам мануальной терапии в самых разных школах и у инструкторов.
Мануальная терапия – это всего лишь один инструмент в наборе физиотерапевта, который позволяет им мобилизовать жесткие суставы и мягкие ткани.
Эта специализированная форма лечения помогает уменьшить отек, уменьшить ограничение, мобилизовать суставы и увеличить диапазон движений.
Будет ли для меня безопасна мануальная терапия?
Одним словом – да!
Наши физиотерапевты North Smithfield – это высококвалифицированные медицинские специалисты, которые понимают ограничения вашего тела, а также его возможности.
На самом деле, многие пациенты замечают улучшение уже после одного сеанса мануальной терапии!
Одним из важнейших аспектов мануальной терапии является то, что она неинвазивна.Также не требуются какие-либо вредные лекарства.
Вместо этого наши физиотерапевты используют различные техники, которые помогают двигать сухожилиями, связками и суставами таким образом, чтобы облегчить боль и способствовать заживлению. Они также помогают уменьшить рубцовую ткань и уменьшить отек.
Как выглядят процедуры мануальной терапии?
Методы мануальной терапии могут включать, но не ограничиваются:
Мобилизация / манипуляции
Когда вы испытываете сильную боль после травмы, обычно это результат сужения сустава.Наши физиотерапевты специально обучены мобилизации на ограниченные суставы путем оказания давления с низкой скоростью.
Техники мобилизации безопасны, эффективны и безболезненны, они позволяют увеличить диапазон движений и улучшить подвижность ограниченного сустава.
Ручная тяга
Когда наши физиотерапевты выполняют ручное вытяжение, они прикладывают легкую силу к определенной области тела, чтобы мягко растянуть мягкие ткани и восстановить нормальные естественные движения.
Хотя шея является наиболее распространенной областью вытяжения вручную, ее также можно выполнять на других частях тела, включая руки, ноги и спину.
Массаж мягких тканей
Процедуры физиотерапевтического массажа немного отличаются от тех, которые вы можете увидеть в спа-салоне. Они носят более терапевтический характер и имеют медицинское назначение.
Наши физиотерапевты из Северного Смитфилда используют массаж как способ манипулировать мягкими тканями, работая над разрушением рубцовой ткани и спаек, вызванных воспалением или травмой.
Это достигается за счет глубокого надавливания и ритмичного растяжения, что позволяет им находить и мобилизовать участки вашего тела, которые сильно ограничены. Эти методы также помогают улучшить кровоток и кровообращение в пораженных мышцах и мягких тканях.
Добавить комментарий