Манипулятор тадано: КМУ Tadano – характеристики, фото, инструкция по эксплуатации крана-манипулятора Тадано
Кран манипулятор TADANO TMZ303
Технические характеристики крана манипулятора, представленного в ООО “КранТракСервис”, включают в себя:
| Г/П КРАНА | Грузоподъёмность: 2,93 тонны на 2,6 м (4 ветви), вылет стрелы 7,7 м. |
| СТРЕЛА | Полностью механизированная телескопическая стрела с пятиугольной коробчатой конструкцией |
| Секции | 3 |
| Рабочий радиус | 3,27 м – 7,7 м |
| Скорость выдвижения | 4,43 м / 12 с |
| Диапазон / скорость подъема | 1 – 78 град. / 7,5 с |
| Высота подъема крюка над уровнем земли | 9,2 м |
| Макс. вылет стрелы | 7,7 м |
| Выдвижение стрелы | 2-мя гидроцилиндрами |
| Грузовой момент | 7,62 т/м |
| ЛЕБЕДКА | Гидравлический мотор, редуктор с автоматическим механическим тормозом.  Редуктор с прямозубыми цилиндрическими шестернями. Редуктор с прямозубыми цилиндрическими шестернями. |
| Макс. скорость намотки одинарного троса | 76 м /мин (при намотке троса в 4 слоя) |
| Скорость подъёма крюка | 19,0 м/мин (при намотке троса в 4 слоя с четырехтросовой системой подвески крюка) |
| Крюковой блок | Грузоподъемность 3000 кг, 2-х блочный с предохранительной защелкой |
| Стальной трос (диаметр х длина) | 8 мм х 51 м Конструкция (JIS) lWRC 6 х WS(26) GRADE B Усилие разрыва 42,4кН (4320кгс) |
| ПОВОРОТ | С приводом от гидромотора. Редуктор с червячной передачей. Непрерывный поворот на 360 град. |
| Скорость поворота | 2,5 обор / мин |
| ОПОРЫ (АУТРИГЕРЫ) | Горизонтальное выдвижение аутригеров – вручную |
| Вертикальное выдвижение аутригеров | Гидроцилиндры двойного действия с управляемым клапаном |
| Ширина выдвижения | Макс. : 3,4 м, Ср.: 2,7 м, Мин.: 2,0 м : 3,4 м, Ср.: 2,7 м, Мин.: 2,0 м |
| ГИДРАВЛ. СИСТЕМА | Номинальное давление в гидравлической системе 20,6MPa (210кгс/cм2) |
| Гидравл. насос | Гидравлический насос – шестерёнчатый тип. Номинальная произв-ность 32 л/мин. Номинальная частота вращения 1700 об/мин |
| Гидравл. клапана | Управляющий клапан непрерывного действия с клапаном сброса давления |
| ПОДХО-ДЯЩИЕ ГРУЗОВИКИ | Полная масса автомобиля 7500 – 10000 кг |
| ООО “КранТракСервис / сайт: www.kran-ts.ru / тел. +7(916)551-35-78 | |
Рабочий диапазон крана манипулятора TADANO TMZ303
Указанные в рабочем диапазоне высоты подъёма и углы наклона стрелы приведены для прямой (не нагруженной) стрелы. Необходимо сделать поправку на отклонение стрелы под нагрузкой.
Расчётные грузоподъёмности крана манипулятора TADANO TMZ303При расчёте грузоподъёмности крана манипулятора необходимо добавлять к массе нагрузке (весу груза) массу крюка (30 кг), канатов (тросов) и всех аналогично используемых грузоподъёмных устройств.
ВНИМАНИЕ
1. Полностью выдвигайте аутригеры и устанавливайте КМУ горизонтально.
2. Таблица рассчитана на основе возможностей КМУ и не учитывает устойчивость автомобиля.
3. Указанные нагрузки необходимо скорректировать в соответствии с весом самого автомобиля, состоянием его загруженности, положением аутригеров, силой ветра, состоянием поверхности и скоростью управления.
4. Из грузоподъёмности необходимо вычесть вес крюка (30кг) и строповочных приспособлений.
5. В связи с постоянным улучшением характеристик КМУ, спецификации могут быть изменены.
Посмотреть другие, пользующиеся высоким спросом модели кранов-манипуляторов, которые можно приобрести у нас – здесь
Краткие характеристики и наличие манипуляторов на складе можно уточнить в разделе:
С примерами, как установить кран манипулятор, можно ознакомиться в разделе:
Варианты применения кранов манипуляторов при различных видах погрузочно-разгрузочных работ представлены в разделе:
Получить консультации по подбору крана манипулятора на свой автомобиль или получить консультацию по установке КМУ можно по телефону:
Краны-манипуляторы Tadano в России
|
Японская компания Tadano Ltd выпускает краны различного типа с 1948 г. Серия Tadano ТМ это краны-манипуляторы с тросовой подвеской крюка и телескопической стрелой диапазон грузоподъемности от 1-8 т. Краны-манипуляторы Tadano ТМ разделены на сублинейки малой грузоподъемности (весом 1-3 т), средней (3-3,3 т) и высокой (весом 3,2-8,2 т). Мы предлагаем в со склада в Подольске (Московская область) краны-манипуляторы Tadano как новые, так и б у, что позволяет в полной мере удовлетворить потребности потенциальных покупателей, т. к. обеспечивает широкий ценовой диапазон выбора. к. обеспечивает широкий ценовой диапазон выбора.
Среди полезных дополнительных опций гидроманипуляторов Тадано хочется отметить следующие
Трос, применяемый в гидроманипуляторах марки Тадано имеет стандартные характеристики – обычно 8 мм. Барабан для троса имеет дорожки для троса, чтобы тот намотке трос располагался слоями Высокая надежность кранов-манипуляторов Tadano, позволяющая в условиях Москвы или другого города длительное время эксплуатировать б.у. крановые установки обеспечивается помимо всего прочего
Продажа КМУ ТАДАНО в Москве |
 Благодаря высоким технологиям, которые примененяются при изготовлении спецтехники в Японии, краны-манипуляторы Tadano привлекают своей надежностью и комфортом. В настоящее время более чем в 120 странах мира реализуется спецтехника Tadano, значительный сегмент которой представляют крановые гидроманипуляторы.
Благодаря высоким технологиям, которые примененяются при изготовлении спецтехники в Японии, краны-манипуляторы Tadano привлекают своей надежностью и комфортом. В настоящее время более чем в 120 странах мира реализуется спецтехника Tadano, значительный сегмент которой представляют крановые гидроманипуляторы.

Манипулятор лидера с функцией упора для рук для микрохирургии
. 2022 апр;18(2):e2355.
doi: 10.1002/rcs.2355. Epub 2021 8 декабря.
Солмон Чон 1 , Котаро Тадано 2
Принадлежности
- 1 Инженерная школа Токийского технологического института, Йокогама-ши, Япония.

- 2 Лаборатория будущих междисциплинарных исследований в области науки и техники, Токийский технологический институт, Йокогама-ши, Япония.

- PMID: 34826367
- PMCID: PMC9286542
- DOI: 10.1002/rcs.2355
Бесплатная статья ЧВК
Солмон Чжон и др. Int J Med Robot. 2022 АпрельБесплатная статья ЧВК
. 2022 апр;18(2):e2355.
doi: 10.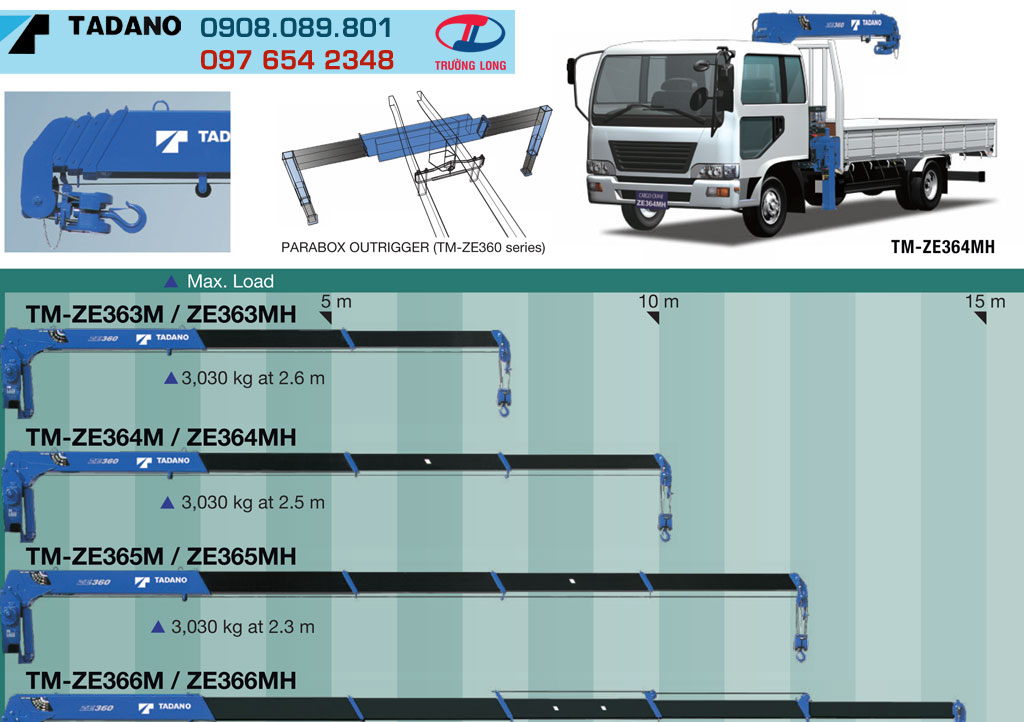 1002/rcs.2355.
Epub 2021 8 декабря.
1002/rcs.2355.
Epub 2021 8 декабря.
Авторы
Солмон Чон 1 , Котаро Тадано 2
Принадлежности
- 1 Инженерная школа Токийского технологического института, Йокогама-ши, Япония.
- PMID: 34826367
- PMCID: PMC9286542
- DOI:
10. 1002/rcs.2355
 1002/rcs.2355
1002/rcs.2355Абстрактный
Фон: Подставка для руки помогает микрохирургам поддерживать стабильное состояние руки. При манипулировании хирургическим роботом с помощью дистанционного управления внешняя опора для рук создает механические трудности, такие как помехи от манипуляторов.
Методы: Здесь мы представили функцию упора для рук в манипулятор лидера. Функция упора для руки была реализована путем переключения значения импеданса в контроле проводимости для секции перемещения. При дистанционном управлении мы оценили точность позиционирования в направлении силы тяжести и условия манипулирования во время точного позиционирования.
Полученные результаты: Эксперименты показали, что положение упора для рук может быть установлено в предполагаемом положении, а условие с функцией упора для рук, применение достаточно высокого импеданса и отсутствие полного ограничения упора для рук обеспечивало наилучшую производительность.
Заключение: Наш передовой манипулятор продемонстрировал потенциал для улучшения качества роботизированной микрохирургии с преимуществом в тонкой манипуляции, основанной на большом рабочем диапазоне перемещения упора для руки.
Ключевые слова: упор для рук; манипулятор лидера; микрохирургия; роботизированная хирургия; телеоперация.
© 2021 Авторы. Международный журнал медицинской робототехники и компьютерной хирургии, издаваемый John Wiley & Sons Ltd.
Заявление о конфликте интересов
У авторов нет конфликта интересов в отношении данной рукописи.
Цифры
РИСУНОК 1
Обзор руки, держащей…
РИСУНОК 1
Обзор руки, держащей хирургический инструмент
РИСУНОК 1Обзор руки, держащей хирургический инструмент
РИСУНОК 2
Обзор манипулятора лидера…
РИСУНОК 2
Обзор манипулятора выноски, состоящего из (A) перемещения, (B) ориентации и (C)…
ФИГУРА 2 Обзор манипулятора лидера, состоящего из (A) секции перемещения, (B) ориентации и (C) секции захвата. (D) Фотография лидера-манипулятора
(D) Фотография лидера-манипулятора
РИСУНОК 3
Фурнитура захвата…
РИСУНОК 3
Фурнитура секции захвата
РИСУНОК 3Фурнитура секции захвата
РИСУНОК 4
Система управления переводом…
РИСУНОК 4
Система управления секции перевода для функции упора для рук: f ext ,…
РИСУНОК 4Система управления секции перевода для функции упора для рук: fext, внешнее усилие; J — матрица Якоби трансляционного сечения; Zon,Zoff, значение импеданса в каждом режиме; x˙on,x˙off, эталонная скорость в каждом режиме
РИСУНОК 5
Обзор управления рукой…
РИСУНОК 5
Обзор управления функцией упора для рук
РИСУНОК 5Обзор управления функцией подставки для рук
РИСУНОК 6
Обзор оценки…
РИСУНОК 6
Обзор оценки точности позиционирования: (A) лидерная часть; (B) деталь толкателя
РИСУНОК 6Обзор оценки точности позиционирования: (A) лидерная часть; (B) деталь толкателя
РИСУНОК 7
Результаты оценочного эксперимента…
РИСУНОК 7
Результаты оценочного эксперимента (максимальная ошибка)
РИСУНОК 7Результаты оценочного эксперимента (максимальная ошибка)
РИСУНОК 8
Следящий манипулятор в манипуляторе…
РИСУНОК 8
Следящий манипулятор в эксперименте по наведению: (A) Обзор следящей части; (Б)…
РИСУНОК 8Следящий манипулятор в эксперименте по наведению: (A) Обзор следящей части; (B) кончик следящего манипулятора и (C) экспериментальная цель
РИСУНОК 9
Экспериментальная мишень наведения…
РИСУНОК 9
Экспериментальная мишень эксперимента по наведению
РИСУНОК 9Экспериментальная цель эксперимента по наведению
РИСУНОК 10
Обзор передней части…
РИСУНОК 10
Обзор ведущей части эксперимента по наведению
РИСУНОК 10Обзор ведущей части эксперимента по наведению
РИСУНОК 11
Контактная информация между наконечником…
РИСУНОК 11
Контактная информация между наконечником следящего манипулятора и целями: (A)…
РИСУНОК 11Контактная информация между кончиком манипулятора следящего устройства и целями: (A) контакты с успешной целью и (B) контакты с неудачной целью (один участник, RH)
РИСУНОК 12
Позиционная информация входа…
РИСУНОК 12
Позиционная информация о входном движении в лидере (один участник, RH)
РИСУНОК 12Позиционная информация о входном движении в лидере (один участник, RH)
РИСУНОК 13
Результаты экспериментов по наведению:…
РИСУНОК 13
Результаты экспериментов по наведению: (A) необходимое время, (B) количество отказов, (C)…
РИСУНОК 13Результаты экспериментов по наведению: (A) необходимое время, (B) количество отказов, (C) длина траектории входного движения (D) длина траектории упора руки, (E) соотношение запястья и пальца движение, (F) баллы предпочтения условий в экспериментах по указанию
См. это изображение и информацию об авторских правах в PMC
это изображение и информацию об авторских правах в PMC
Похожие статьи
К роботизированной микрохирургии сосудов сетчатки.
Дженсен П.С., Грейс К.В., Аттаривала Р., Колгейт Дж.Е., Глюксберг М.Р. Дженсен П.С. и др. Graefes Arch Clin Exp Офтальмол. 1997 ноябрь; 235 (11): 696-701. DOI: 10.1007/BF01880668. Graefes Arch Clin Exp Офтальмол. 1997. PMID: 9407227
Hamlyn CRM: компактный главный манипулятор для дистанционного управления хирургическим роботом.
Чжан Д., Лю Дж., Чжан Л., Ян Г.З. Чжан Д. и др. Int J Comput Assist Radiol Surg. 2020 март; 15 (3): 503-514. doi: 10.1007/s11548-019-02112-y. Epub 2020 19 января. Int J Comput Assist Radiol Surg. 2020. PMID: 31956954 Бесплатная статья ЧВК.
Новое мастер-устройство контактного типа с точной манипуляцией для роботизированной микрохирургии.
Kim DS, Yang UJ, Cheon B, Baek D, Kwon DS. Ким Д.С. и др. Int J Med Robot. 2021 дек;17(6):e2314. doi: 10.1002/rcs.2314. Epub 2021 17 августа. Int J Med Robot. 2021. PMID: 34297469
Микрохирургическая роботизированная система для витреоретинальной хирургии.
Ида Ю., Сугита Н., Уэта Т., Тамаки Ю., Танимото К., Мицуиси М. Ида Ю и др. Int J Comput Assist Radiol Surg. 2012 Январь;7(1):27-34. doi: 10.1007/s11548-011-0602-4. Epub 2011 15 мая. Int J Comput Assist Radiol Surg. 2012. PMID: 21573828 Обзор.
Роботизированный микрохирургический пинцет для трансоральной лазерной микрохирургии.
Чаухан М., Дешпанде Н., Паккиротти С., Мели Л., Праттичиццо Д., Колдуэлл Д.Г., Маттос Л.С. Чаухан М. и соавт. Int J Comput Assist Radiol Surg. 2019 февраля; 14 (2): 321-333. doi: 10.1007/s11548-018-1887-3. Epub 2018 21 ноября. Int J Comput Assist Radiol Surg. 2019. PMID: 30465304


Посмотреть все похожие статьи
Рекомендации
- Рамачандран С., Ганем А.М., Майерс С.Р. Оценка компетентности в области микрохирургии – где мы сейчас? Микрохирургия. 2013;33(5):406-415. – пабмед
- Ниссенбаум М., Меклер Р., Акланд Р. Положение руки в микрохирургии. J Hand Surg. 1979;4(2):118-120.
–
пабмед
- Ниссенбаум М., Меклер Р., Акланд Р. Положение руки в микрохирургии.
- Коулсон С.Дж., Рид А.П., Проупс Д.В., Бретт П.Н. ЛОР-проблемы в малых масштабах. Int J Med Robot Comput Assist Surg. 2007;3:91-96. – пабмед
- Шитц К.Х., Клафлин Дж., Димик Дж.Б. Тенденции внедрения роботизированной хирургии для обычных хирургических процедур. Сеть JAMA открыта. 2020;3:e1918911. – ЧВК – пабмед
- Кац Р. Д., Россон Г.Д., Тейлор Дж.А., Сингх Н.К. Робототехника в микрохирургии: использование хирургического робота для выполнения свободного лоскута у свиньи. Микросург. 2005;25:566-569.
–
пабмед
- Кац Р.
 J Hand Surg. 1979;4(2):118-120.
–
пабмед
J Hand Surg. 1979;4(2):118-120.
–
пабмед Д., Россон Г.Д., Тейлор Дж.А., Сингх Н.К. Робототехника в микрохирургии: использование хирургического робота для выполнения свободного лоскута у свиньи. Микросург. 2005;25:566-569.
–
пабмед
Д., Россон Г.Д., Тейлор Дж.А., Сингх Н.К. Робототехника в микрохирургии: использование хирургического робота для выполнения свободного лоскута у свиньи. Микросург. 2005;25:566-569.
–
пабмедтермины MeSH
Манипулятор с пневматическим приводом для лапароскопической хирургии
- title={Пневматический манипулятор щипцов для лапароскопической хирургии},
автор = {Кодак Тадано и Ватару Сумино и Кенджи Кавасима и Тошихару Кагава},
journal={Ежегодная конференция SICE 2008},
год = {2008},
страницы={2993-2996}
}
- K. Tadano, W. Sumino, T. Kagawa
- Опубликовано 21 октября 2008 г.
- Engineering
- 2008 SICE Annual Conference
. Манипулятор имеет вращающееся соединение с приводом от проволоки в концевой части и обеспечивает точное вращение захвата на практике. Предложен и реализован захватный механизм, состоящий из малого цилиндра и ползунково-кривошипного механизма в концевой части. Захват приводится в действие давлением воздуха, подаваемым через тонкую трубку, что позволяет избежать взаимодействия с другими соединениями. Сила захвата 20 Н составляет…
Посмотреть на IEEE
doi.org
РАЗРАБОТКА МАНИПУЛЯТОРА С ПНЕВМАТИЧЕСКИМ ПРИВОДОМ С ИСПОЛЬЗОВАНИЕМ ГИБКОГО СОЕДИНЕНИЯ
- Дайсуке Харагути, Котаро Тадано, К. Кавасима
- 0 0060 Engineering
- 0
- 2012
В данном документе представлены первый прототип манипулятора щипцов с пневматическим приводом, использующий простое гибкое соединение для будущей миниатюризации. Высокоэффективный пружинный компонент с тросовым приводом…
Разработка манипулятора щипцов с пневматическим приводом IBIS IV
- Котаро Тадано, К. Кавасима
Инжиниринг
2009 ICCAS-SICE
- 2009
В смысле оператора малоинвазивной хирургии с дистанционным управлением возникает проблема силы, измерения и отображения. Мы предложили пневматический хирургический манипулятор, способный…
Хирургический манипулятор с пневматическим приводом и гибким дистальным шарниром, способным воспринимать силу
В этой статье представлен новый манипулятор щипцов для хирургических роботизированных систем. Манипулятор щипцов имеет сильно упрощенный гибкий дистальный шарнир, который приводится в действие за счет двухтактных движений…
Штабелируемые 4-звенные механизмы и их применение в робототехнике
Новый планарный робот-манипулятор, использующий штабелируемые 4-звенные механизмы для различных применений, таких как манипулятор хирургического робота и манипуляторы полевого робота, имеет то преимущество, что все приводные механизмы могут быть разделены от механического механизма.
Штабелируемые 4-звенные манипуляторы для хирургии с доступом к одному порту
В этом документе предлагается новый роботизированный манипулятор, использующий штабелируемые 4-звенные механизмы для хирургии с одним портом (SPA), где операция выполняется путем введения нескольких манипуляторов через один…
Плоский манипулятор с использованием штабелируемых механизмов 4-BAR
- Hoyul Lee, Youngjin Choi
Engineering
- 2010
Преимущество предлагаемого манипулятора в том, что мы можем разделить приводные механизмы…
Многосуставной манипулятор и его движение с несколькими степенями свободы с помощью распределенных тонких цилиндро-поршневых приводов
- T. Chishiro, S. Konishi
Engineering
2013 Transducers & Eurosensors XXVII: 17-я Международная конференция по твердотельным датчикам, приводам и микросистемам (TRANSDUCERS & EUROSENSORS XXVII)
900 25- Y. Matsushita, C. Nakagami, T. Toriyama, S. Konishi
Engineering, Materials Science
2013 Transducers & Eurosensors XXVII: 17-я Международная конференция по твердотельным датчикам, исполнительным механизмам и микросистемам (TRANSDUCERS & EUROSENSORS XXVII)
- 2013
- Л. Чурезу-Герге, Н. Думитру, К. Копилуси
Инженерное дело
- 2018
Эта бумага представляет многосуставной манипулятор для эндоскопа.
В большинстве эндоскопов и щипцов используется механизм с тросовым приводом. Ранее мы предлагали соединенные приводы поршень-цилиндр для привода…Многосуставной привод, состоящий из последовательно соединенных микропоршней для носимого привода
Пневматические микроприводы, такие как баллонный привод и привод поршень-цилиндр, высоко ценятся за их высокую плотность усилия. В этой статье предлагаются последовательно соединенные миниатюрные микропоршни с…
Исследование прочности тонкопленочного PDMS для надежного пневматического привода баллона
В этой статье исследуется прочность материала тонкопленочного PDMS, широко используемого для биомедицинских MEMS и μTAS.
Это исследование посвящено прочности материала мембраны PBA. Диаграмма напряжение-деформация PDMS представляет собой…Обзор змеевидных единиц
7 2018
Устройство может быть очень хорошей альтернативой для хирургии с однопортовым доступом (SPA), или его можно использовать и в других условиях.
Разработка основного рабского манипулятора с силовым дисплеем с использованием пневматической сервоприводы для лапароскопической хирургии
- Kotaro Tadano, K. Kawashima
Medicine
- 2007
В телеоперационном сроке. чувство силы для оператора является проблемой. В…
Эффект визуальной и тактильной обратной связи при компьютеризированном введении иглы
Наложение изображения в реальном времени значительно улучшает контролируемый прокол во время введения иглы, а силовая обратная связь может не понадобиться, за исключением случаев, когда визуальная обратная связь ограничена.

 Кавасима
Кавасима
 В большинстве эндоскопов и щипцов используется механизм с тросовым приводом. Ранее мы предлагали соединенные приводы поршень-цилиндр для привода…
В большинстве эндоскопов и щипцов используется механизм с тросовым приводом. Ранее мы предлагали соединенные приводы поршень-цилиндр для привода… Это исследование посвящено прочности материала мембраны PBA. Диаграмма напряжение-деформация PDMS представляет собой…
Это исследование посвящено прочности материала мембраны PBA. Диаграмма напряжение-деформация PDMS представляет собой…
Добавить комментарий