Какой манипулятор лучше тросовый или гидравлический: Гидравлика или трос? Выбираем тип КМУ
Сравнение кранов-манипуляторов
| Сравнение кранов-манипуляторов |
| 16.04.2021 09:54 |
Извечный вопрос о том, какой кран-манипулятор лучше будет актуален всегда, несмотря на то, что правильный ответ на него зависит прежде всего от той работы, под которую он приобретается, а также от параметров шасси, на которое он будет установлен… Гидроманипулятор или тросовый кран-манипулятор?Этот вопрос наиболее часто задают начинающие, да и не только начинающие манипуляторщики. В таком виде он более корректный, чем вопрос «какой манипулятор лучше – L-образный(телескопический) или Z-образный шарнирный. Дело в том, что на шарнирную КМУ также можно установить лебедку и тогда сравнивать можно только конкретные модели КМУ в одинаковой «весовой категории» в контексте выполняемой ими работы. Поэтому под гидроманипулятором мы в данном случае будем подразумевать Z-образный манипулятор без троса или, на жаргоне манипуляторщиков «окорок» в противовес к телескомической КМУ, которую когда-то называли «воровайкой»(отмечая таким образом возможность крана-манипулятора работать даже через оконный проем) В настоящей статье мы решили не описывать преимущества и недостатки каждого типа кранов манипуляторов, а предлагаем вашему вниманию видео отзывы на данную тему, где сами манипуляторщики делятся своими соображениями по поводу использования гидравлических манипуляторов и тросовых телескопических КМУ. Какой кран-манипулятор лучше – TADANO ИЛИ UNICЕще один очень распространенный вопрос уже по японским моделям манипуляторов. Он связан не столько с тем, что эти модели самые лучше по сравнению с Sakai ShinMaywa или другими КМУ из Японии, а потому, что это самые распространенные манипуляторы и их производство продолжается и сейчас. Хотя статистика по России показывает, что КМУ Тадано пользуются большим спросом, это связано не с тем, что их технические характеристики лучше, чем у UNIC, а скорее с ценой на б/у манипуляторы этого производителя. Остались вопросы?Если вы не знаете, какая модель крана-манипулятора вам нужна – позвоните нам или напишите, мы работаем на рынке КМУ с 2006 г и накопили огромный опыт не только по продаже КМУ, но и установке манипуляторов на грузовые автомобили, поэтому наши специалисты обязательно помогут подобрать лучший вариант крана-манипулятора именно для вас. Что еще почитать на эту тему
|

 И здесь тоже предлагаем посмотреть видео-отзыв
И здесь тоже предлагаем посмотреть видео-отзыв
Тросовый или гидравлический манипулятор, какой лучше?
Краново-манипуляторная установка (КМУ) позволяет выполнить различные строительно-монтажные и погрузочно-разгрузочные работы. Кран-манипулятор, установленный на грузовой автомобиль, отличается простым управлением, компактностью, неприхотливостью в уходе, минимальными затратами на обслуживание.
Особенности эксплуатации манипулятора
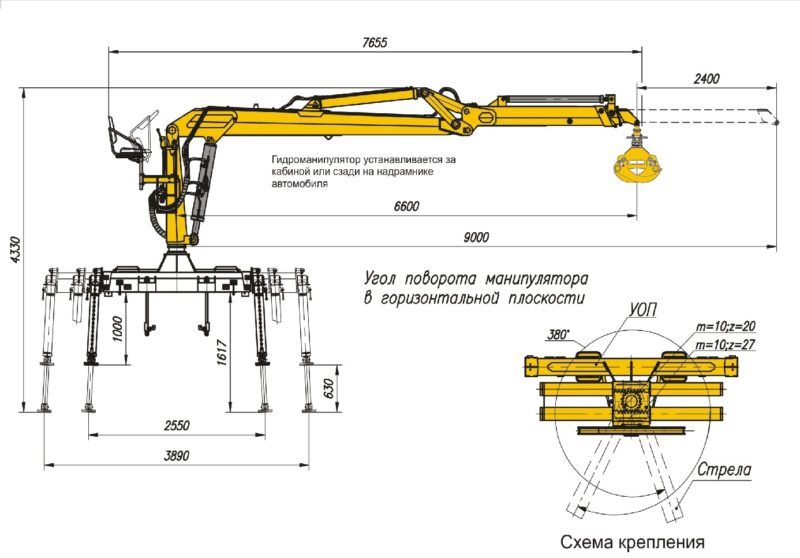
Кран-манипулятор – гидравлический кран, имеющий полноповоротную телескопическую стрелу, тросовую подвеску для подъёма грузов. Обеспечивает аккуратную и точную разгрузку и погрузку, перенос грузов на подготовленную площадку. Манипулятор может перенести груз через препятствие, справится с предметами, находящимися ниже уровня самого оборудования, в траншее или колодце.
Особенности эксплуатации манипулятораУстройство манипулятора:
- основание;
- опоры;
- колонна с гидроколлектором;
- стрела;
- гидрораспределитель;
- редуктор лебёдки;
- редуктор поворота;
- гидроцилиндр.

Современные модели оснащены датчиками, подающими сигнал о превышении допустимой массы груза.
Сферы применения манипуляторов:
- эвакуация автомобилей;
- разгрузка и выгрузка грузов;
- подача строительных материалов в котлованы, окна;
- снос металлоконструкций;
- укладка труб;
- монтаж техники;
- установка ограждений.
Устройства компактные, имеют небольшую массу, совместимы с большинством типов грузового автотранспорта. В сложенном состоянии КМУ не мешают движению спецтехники.
Типы манипуляторов
Устройство стрелы напоминает телескоп, выдвигаются нужные секции. При выборе манипулятора нужно учитывать размеры рамы, допустимую нагрузку. Производители предлагают два вида крана-манипулятора – L-образный (тросовый) и Z-образный (гидравлический).
Тросовый манипулятор
Внешний вид оборудования напоминает заглавную английскую латинскую букву L, размещённую под углом 90°. Стрела телескопическая, состоит из нескольких секций. Крюк подвешен на тросе, перемещается с помощью лебёдки. Оборудование установлено вдоль кузова автомобиля, рядом можно разместить длинномерные грузы.
Крюк подвешен на тросе, перемещается с помощью лебёдки. Оборудование установлено вдоль кузова автомобиля, рядом можно разместить длинномерные грузы.
Преимущества тросовых КМУ:
- простота конструкции;
- надёжность;
- ремонтопригодность;
- небольшая масса (до 3 т), это снижает нагрузку на переднюю ось, позволяет перевозить тяжёлые грузы;
- большой вылет стрелы – 7–19 м;
- возможность размещать грузы в точно выбранном месте в определённом порядке;
- плавная работа без толчков;
- вертикальное нахождение груза во время перемещения;
- грузоподъёмность при большом вылете стрелы до 2200 кг;
- неограниченный угол поворота колонны;
- перемещение предметов через препятствия, можно достать грузы с глубины до 25 м;
- наличие датчиков, сигнализирующих о перегрузе.
Существует ряд ограничений: нельзя компактно сложить стрелу во время движения, она не оставляет места для крупногабаритных грузов.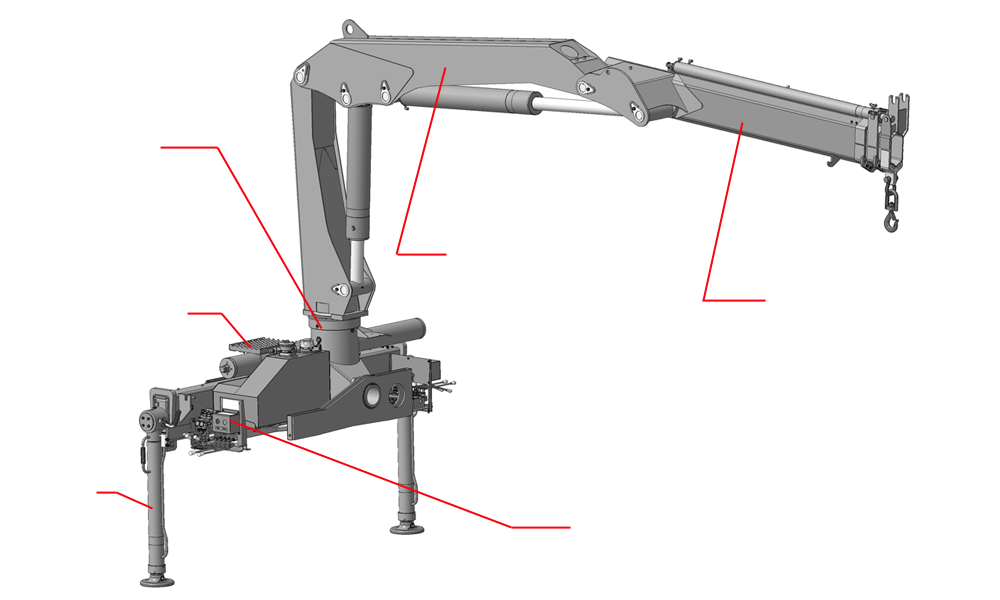 Так как стрела не складывается, нельзя транспортировать предметы, выступающие по высоте за её пределы.
Так как стрела не складывается, нельзя транспортировать предметы, выступающие по высоте за её пределы.
Выкупаем манипуляторы независимо от технического состояния оперативно и дорого.
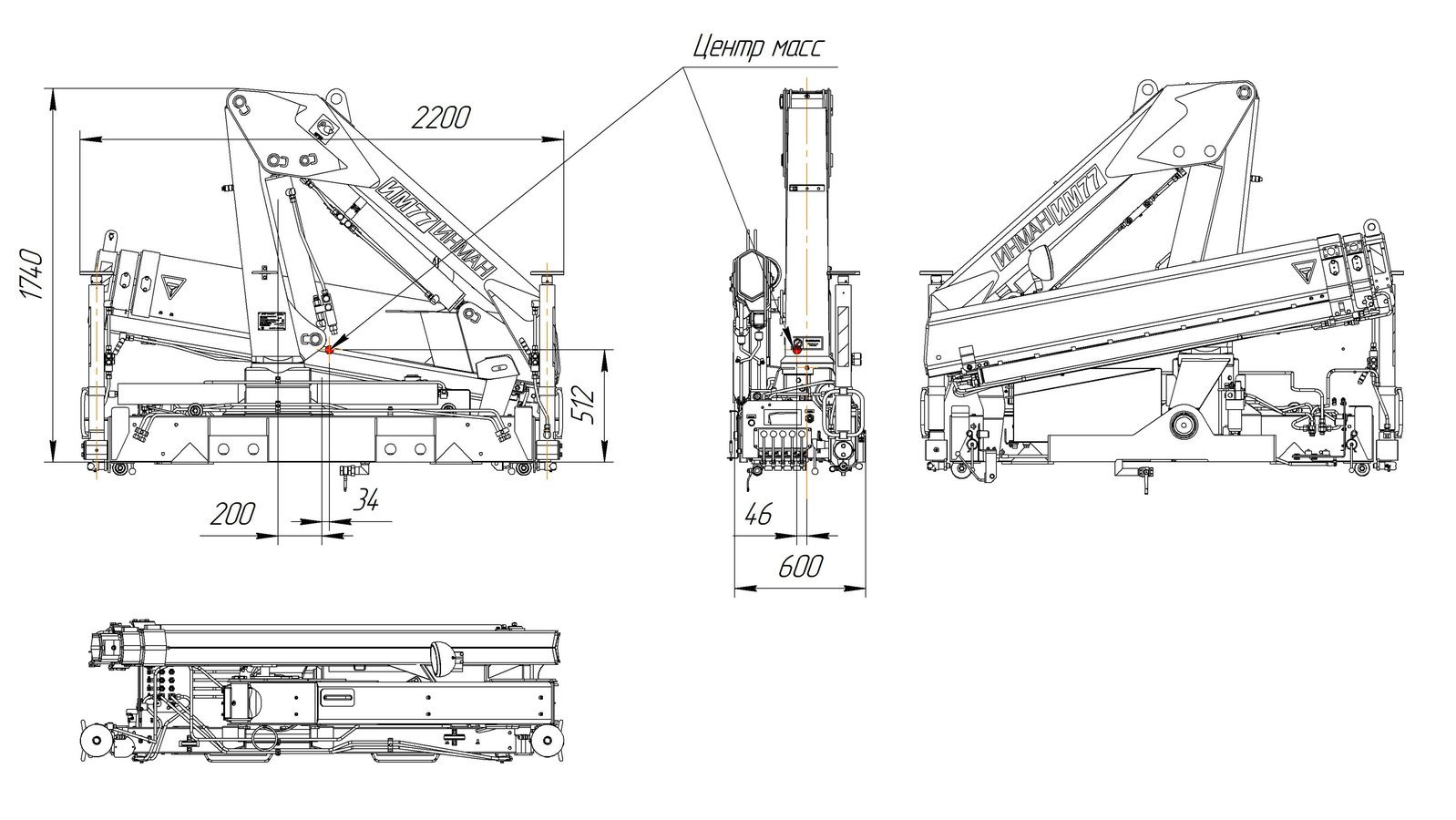
Гидравлический манипулятор
В этих моделях трос отсутствует, поворотный крюк смонтирован на торцевой секции стрелы. Стрела имеет телескопическую конструкцию, кран установлен за кабиной водителя или на задней части борта. Компактная спецтехника востребована при ведении строительных и монтажных работ на застроенных участках, куда не может проехать крупногабаритный кран. Стрела складывается и раскладывается с высокой скоростью, что снижает возможность точного переноса груза на нужный участок. Манипулятор гидравлического типа поднимает стройматериалы на перекрытия возводимых зданий.
Преимущества гидравлических моделей:
- жёсткое крепление навесных узлов расширяет функциональность спецтехники;
- крюк жёстко зафиксирован на стреле, она перемещается секционно, это препятствует раскачиванию груза при транспортировке;
- система датчиков исключает перегруз;
- секции стрелы в сложенном состоянии находятся за кабиной, нет перегрузок на передний мост автомобиля;
- высокая скорость движения стрелы.
Продать спецтехнику с пробегом можно компании Excavator Sale. Заполните заявку на сайте, узнайте примерную стоимость, договоритесь о приезде технического эксперта. Вам не придётся оплачивать экспертизу, эвакуацию и оформление договора купли-продажи. Расплатимся за манипулятор в день обращения.
Гидравлический роботизированный хирургический манипулятор для смены инструментов
[1]
Суонстрем,
Л. Л.
,
Хаджанчи,
Ю.
, и
Аббас,
М. А.
, 2008, “
Транслюминальная эндоскопическая хирургия через естественные отверстия: будущее желудочно-кишечной хирургии», Пермь.
[2] Накамура, А. , 2010, “ Проектирование и анализ многофункционального робота для НОТ», М.С. диссертация, Университет Небраски-Линкольн, Линкольн, Небраска. http://digitalcommons.unl.edu/mechengdiss/11/ [Google Scholar]
[3] Каримяна, В. , Содергрена, М. , Кларка, Дж. , Янб, Г. З. , и Дарзия, А. , 2009, “ Навигационные системы и платформы в транслюминальной эндоскопической хирургии через естественные отверстия (ПРИМЕЧАНИЯ)», Int. Дж. Сур., 7(4), стр. 297–304. 10.1016/j.ijsu.2009.05.007 [PubMed] [CrossRef] [Google Scholar]
[4] Понски, Дж. Л. , 2006, “ Эндолюминальная хирургия: прошлое, настоящее и будущее», Surg. эндоскопия, 20(2), стр. 500–502. 10.1007/s00464-005-0870-6 [PubMed] [CrossRef] [Google Scholar]
[5]
Харада1,
К.
,
Отомо,
Д.
,
Сусило,
Э.
,
Менчиасси,
А.
,
Дэни,
Д.
,
Мерле,
Дж. П.
, и
Дарио,
П.
, 2010, “
Реконфигурируемая модульная роботизированная эндолюминальная хирургическая система: представления и предварительные результаты», Robotica,
28(2), стр.
[6] Леман, А. К. , 2012, “ Миниатюрные роботы in vivo для малоинвазивной хирургии», доктор философии. диссертация, Университет Небраски в Линкольне, Линкольн, Небраска.http://gradworks.umi.com/35/21/3521519.html [Академия Google]
[7] Сын, Дж. , Чо, К. Н. , Ким, КГ. , Чанг, Т. Ю. , Юнг, ЧАС. , Ким, С. К. , Ким, М. Т. , Ян, Н. , Ким, Т. Ю. , и Зон, Д. К. , 2015, “ Новый полуавтоматический робот-змея для транслюминальной эндоскопической хирургии через естественные отверстия: доклинические испытания на моделях трупов животных и человека (с видео)», Surg. эндоскопия, 29(6), стр. 1643–16437. 10.1007/s00464-014-3854-6 [PubMed] [CrossRef] [Google Scholar]
[8]
Чжан,
ИКС.
,
Подбородок,
У. Дж.
,
Сеоу,
СМ.
,
Накамура,
А.
,
Голова,
М.
,
Фарритор,
С. М.
,
Олейников,
Д.
, и
Нельсон,
К. А.
, 2011, “
Многофункциональная роботизированная платформа для хирургии естественных отверстий», Stud. Технологии здоровья. инф.
[9] Шен, Т. , Нельсон, С. , Уорбертон, К. , и Олейников, Д. , 2015, “ Проектирование и анализ нового шарнирно-сочлененного приводного механизма для многофункционального робота NOTES», ASME J. Mech. Роб., 7(1), с. 011004. 10.1115/1.4029307 [бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
[10] Сеоу, СМ. , Подбородок, У. Дж. , Нельсон, К. А. , Накамура, А. , Фарритор, С. , и Олейников, Д. , 2013, ” Шарнирный манипулятор с несколькими инструментами для транслюминальной эндоскопической хирургии через естественные отверстия», ASME J. Med. Устройства, 7(4), с. 041004. 10.1115/1.4025183 [CrossRef] [Google Scholar]
[11] Фи, С.Дж. , Низкий, С. К. , Солнце, З. Л. , Хо, К. Ю. , Хуан, В. М. , и Тан, З. , 2008, “ Роботизированная система для хирургии желудочно-кишечного тракта без рубцов», Int. Дж. Мед. Роб. вычисл. Ассистент хирурга, 4(1), стр. 15–22. 10.1002/rcs.179 [PubMed] [CrossRef] [Google Scholar]
[12]
Берг,
Д.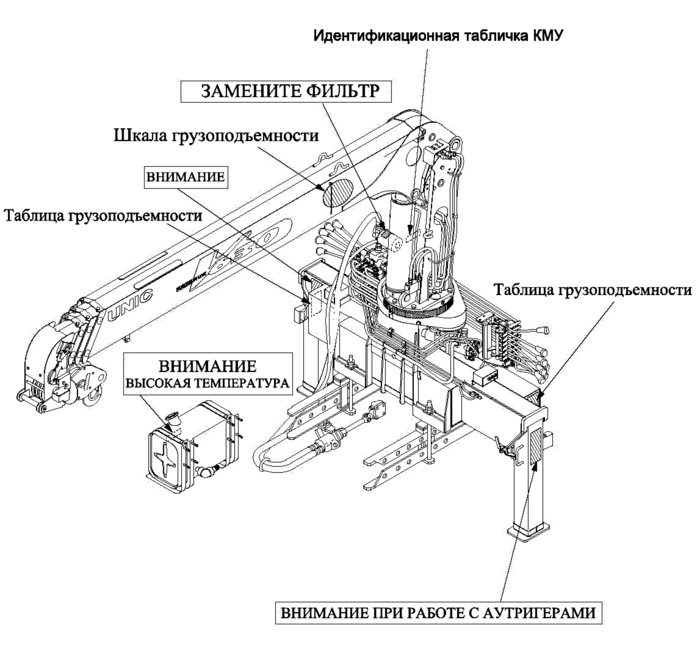 Р.
, 2013, ”
Разработка гидравлического ловкого манипулятора для малоинвазивной хирургии», к.м.н. диссертация, Миннесотский университет — города-побратимы, Миннеаполис, Миннесота. http://s3.amazonaws.com/drb_website_storage/devinberg.com/DevinBerg_dissertation2013s.pdf [Google Scholar]0003
Р.
, 2013, ”
Разработка гидравлического ловкого манипулятора для малоинвазивной хирургии», к.м.н. диссертация, Миннесотский университет — города-побратимы, Миннеаполис, Миннесота. http://s3.amazonaws.com/drb_website_storage/devinberg.com/DevinBerg_dissertation2013s.pdf [Google Scholar]0003
[13] Мёрс, Эй Джей , Де Волдер, М. Ф. , и Рейнартс, Д. , 2012, “ Интегрированное микрогидравлическое управление и приведение в действие высокого давления для хирургических инструментов», Biomed. микроустройства, 14 (4), стр. 699–708. 10.1007/s10544-012-9650-y [PubMed] [CrossRef] [Google Scholar]
[14] Лю, Т. , 2011, “ Проектирование и прототипирование роботизированного запястного механизма с тремя степенями свободы для роботизированной хирургической системы», М.С. диссертация, Университет Кейс Вестерн Резерв, Кливленд, Огайо. http://engr.case.edu/cavusoglu_cenk/papers/TaomingLiuMS2010.pdf [Google Scholar]
[15]
Стилли,
А.
,
Вурдеманн,
Х. А.
, и
Альтефер,
К.
, 2014, “
Усаживаемый мягкий манипулятор с регулируемой жесткостью, основанный на антагонистическом принципе срабатывания, вдохновленном биологическими методами», Международная конференция IEEE/RSJ по интеллектуальным роботам и системам (IROS), 14–18 сентября, стр. 2476–2481 10.1109/IROS.2014.694289910.1109 /ИРОС.2014.6942899. [CrossRef] [Google Scholar]
2476–2481 10.1109/IROS.2014.694289910.1109 /ИРОС.2014.6942899. [CrossRef] [Google Scholar]
[16] Пургодрат, А. , Нельсон, К. А. , и Олейников, Д. , 2014, “ Электрогидравлический робот-манипулятор с несколькими инструментами для малоинвазивной хирургии», ASME J. Med. Устройства, 8(3), с. 030919. 10.1115/1.4027040 [CrossRef] [Google Scholar]
[17] Пургодрат, А. , и Нельсон, К. А. , 2016, “ Одноразовые гидравлические приводы для миниатюрной хирургической робототехники in-vivo», ASME J. Med. Приборы 10.1115/1.4035005, 11(1), с. 011003. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
CRL R0W1 Гидравлический манипулятор стрелы
Элемент #: R0W1 by CR Laurence
Смотреть отзывы
В наличии 6 334,99 долларов США /каждый
СЭКОНОМЬТЕ ДО 633,50
Покупайте оптом
Наведите курсор на изображение, чтобы увеличить его
См. отзывы См.
отзывы
отзывы См.
отзывы
В наличии 6 334,99 $ /шт.
СОХРАНИТЕ ДО 633,50
Покупка оптом
БЫСТРАЯ ДОСТАВКА*Обычно доставка в течение 1 рабочего дня
Смотреть сейчас
Цитата большого заказа
Покупайте с уверенностью
Простой возврат в течение 30 дней. Мы являемся крупнейшим поставщиком самых адаптируемых, персонализированное оборудование в отрасли. Мы прилагаем все усилия, чтобы вы остались довольны нашей продукцией.
- 1000 фунтов. (453 кг) Номинальная мощность
- Может быть разобрана для транспортировки и повторной сборки за считанные минуты
- Большие колеса для легкого перемещения
- Ручная лебедка с тросом длиной 25 футов (7,6 м)
- Реверсивная стрела с минутным гидравлическим управлением
FOB
Цицерон, Иллинойс.
Транспортировочный вес
360 фунтов (163,29 кг)
Грузоподъемность
1000
Гидравлический
Да
Этот инновационный инструмент имеет стрелу с гидравлическим управлением в труднодоступных местах для установки стекла на место. Гидравлический манипулятор стрелы CRL , используемый в сочетании с вакуумной подъемной рамой (не входит в комплект), упрощает работу со стеклом в любом месте, где вы его используете. Стрелу также можно перевернуть, что увеличивает досягаемость устройства. Он легко собирается без инструментов всего за пять минут. Вы можете сбивать агрегат и перемещать его с этажа на этаж для остекления многоэтажек изнутри. Просто опустите стекло на этаж выше, используя стандартную ручную лебедку. Поместите его в пикап или фургон и перемещайте его с работы на работу. Также доступны варианты с электрической лебедкой.![]() Дополнительная пара подвижных балластных ящиков обеспечивает устойчивость даже при максимальной нагрузке в 1000 фунтов. (453 кг). Вес в упаковке 360 фунтов. (163 кг). ФОБ Центры обслуживания CRL. Должна быть отправлена обычным перевозчиком.
Дополнительная пара подвижных балластных ящиков обеспечивает устойчивость даже при максимальной нагрузке в 1000 фунтов. (453 кг). Вес в упаковке 360 фунтов. (163 кг). ФОБ Центры обслуживания CRL. Должна быть отправлена обычным перевозчиком.
Предупреждение о продукте:
Не превышайте максимальный рекомендуемый предел веса этой машины. Серьезные травмы могут быть нанесены вам и окружающим. Всегда консультируйтесь с CRL или производителем перед первым использованием. Двухсекционная стрела, показанная на изображении выше, была заменена более прочной цельной стрелой для повышения безопасности.
Большинство отгрузочных весов являются приблизительными и не проверялись. Если точный вес необходим для определения стоимости доставки, а стоимость доставки требуется для того, чтобы вы могли завершить свой заказ, запросите это до отправки вашего заказа, связавшись со службой поддержки клиентов CRL. Показанные изображения продукта представляют собой фактический продукт или его близкое изображение.
Добавить комментарий