Гусеничные машины: Колесные и гусеничные машины – Южно-Уральский государственный университет
Гусеничные машины – Гусеничные машины
ЗакрытьPRIVACY POLICY – DATA PROTECTION STATEMENT
Pursuant to current legislation and the provisions of Article 13 of EU Regulation 2016/679 of the European Parliament and the Council of Europe of 27 April 2016 dealing with the protection of natural persons with regard to the processing of personal data and the free circulation of said data (hereinafter “Regulation”), we inform you that the Data Controller of the data you have provided is FAE Group S.p.A. (hereinafter FAE) whose registered office is Unit 18| of the Zona produttiva I-38013 Fondo (TN) Tax Code and VAT no. 01942570225
Web browsing data
The IT systems and software programs used for running this website collect certain personal data whose transmission is implicit in the use of Internet communication protocols (e.g. the IP addresses or domain names of the computers used by users who access the website, as well as the URI addresses -Uniform Resource Identifier – of the information requested, the time of the request, the method used to submit the request to the server, the size of the file obtained in response, the numerical code indicating the status of the response given by the server -success, error, etc.
The data is used for the sole purpose of obtaining statistical information not associated with any user identification data on the use of the website and to check that it is functioning correctly and is deleted immediately after processing. The data may be used to ascertain liability in the event of hypothetical computer crimes against the website.
Data provided voluntarily by the user
The user is not required to provide his or her personal data in order to access this website.
However, any contact with FAE, or the discretionary, deliberate or spontaneous sending of messages, e-mails or conventional mail, to the FAE addresses indicated on this website will result in the subsequent acquisition of the address, including e-mail, of the sender or their telephone number, which are needed in order to respond to requests, as well as any other personal data included in their correspondence.
The data will be used only for the purpose of responding to the user’s request. It will be used only internally for commercial purposes and will not be passed on to third parties.
The processing of data for these purposes does not require your consent since it is necessary for the implementation of a contract to which you are a party or the implementation of pre-contractual measures taken at your request (Article 6, paragraph 1, letter b) of the Regulation), as well as, where applicable, to fulfil a legal obligation (Article 6, paragraph 1, letter a) of the Regulation).
The processing of the data will be carried out by personnel appointed by FAE using procedures, technical and IT tools intended to protect the confidentiality and security of your data and involves collecting, recording, organizing, storing, consulting, processing, modifying, selecting, extracting, comparing, using, linking, blocking, communicating, disseminating, deleting or destroying said data including a combination of two or more of the above activities.
Your data will not be passed on to others.
Within the scope of its activities and for the purposes indicated above, FAE may use services provided by third parties acting on behalf of FAE and according to its instructions, as data controllers. These third parties provide FAE with processing or core services (e.g. IT services for the functioning of the site). You can request a complete and updated list of the persons appointed as data controllers by getting in touch with one of the contacts listed below. The data may be circulated within the European Union, where FAE or its suppliers are based or have their own servers in these countries. The data will not be circulated outside the European Union. FAE shall have the right, at any time, to exercise the rights provided for under current legislation, including the right to:
- receive confirmation of the existence of your personal data and access the content;
- update, modify and/or amend your personal data;
- request that any data processed in violation of the law or processing limitation be deleted (permanently), rendered anonymous, or blocked.

refuse to process data for legitimate reasons; - receive a copy of the data provided by you and request that said data be passed on to another data controller;

by sending a specific request to XX email: [email protected]
Unsubscribe from Newsletter
At any time the User can cancel his/her subscription to the FAE Newsletter by following the instructions given in the email received.
404 Страница не найдена – Иркутская область. Официальный портал
!Вниманию эксплуатантов аттракционов!
Обратите внимание! В соответствии с Постановлением Правительства РФ от 23.09.2020 №1538 «О внесении изменений в постановление Правительства Российской Федерации от 13 ноября 2013 г. №1013 технический осмотр квадроциклов с 07.10.2020 года необходимо проходить в органах гостехнадзора.
Из-за неблагоприятной эпидемиологической обстановки:
Получателям государственных услуг предварительно необходимо осуществить удаленную консультацию по порядку оказания государственных услуг и осуществить запись на прием по телефонам соответствующих подразделений (телефоны подразделений)
Получателям справок о наличии или отсутствии зарегистрированных самоходных машин заявление необходимо подать в сканированном виде на адрес электронной почты irkgtn@gtn. irkutsk.ru. Выдача справки заявителю осуществляется по истечении 5 рабочих дней с даты подачи заявления лично при предъявлении паспорта или доверенному лицу при предъявлении доверенности и паспорта по адресу: г. Иркутск, ул. Мухиной, д. 2А, каб. 216 либо направляется посредством АО Почта России на адрес регистрации заявителя.
irkutsk.ru. Выдача справки заявителю осуществляется по истечении 5 рабочих дней с даты подачи заявления лично при предъявлении паспорта или доверенному лицу при предъявлении доверенности и паспорта по адресу: г. Иркутск, ул. Мухиной, д. 2А, каб. 216 либо направляется посредством АО Почта России на адрес регистрации заявителя.
| Бланк заявления | Бланк доверенности |
Бланк заявления
Плавающие колесные и гусеничные машины (Russian Edition): 9785458305747: Редькин, М.
 Г.: Libros За время, прошедшее с момента выхода в свет первого издания книги, создано значительное количество новых конструкций плавающих колесных и гусеничных машин на базе использования достижений науки и техники, внесших много нового в теоретические положения и конструктивные решения. Расширился также круг вопросов, выдвигаемых практикой и требующих освещения на страницах печати.В связи с этим содержание книги при подготовке ко второму изданию было подвергнуто значительному пересмотру, в книгу внесен ряд дополнений и изменений, отражающих все новейшие достижения в развитии конструкций плавающих колесных и гусеничных машин. Главы II, III и IV дополнены описанием некоторых типов новых плавающих машин, машин с газотурбинными двигателями и двигателями непосредственного впрыска; при этом сохранено описание некоторых рассмотренных ранее машин, представляющих собой самостоятельный тип или характеризующих определенный этап в их развитии. Впервые рассматриваются схемы конструкций новых плавающих машин – автопоездов с активными и пассивными прицепными звеньями, переламывающегося автомобиля, а также схемы конструкций плавающих автомобилей, применяемых в качестве инженерных средств, и др.
Г.: Libros За время, прошедшее с момента выхода в свет первого издания книги, создано значительное количество новых конструкций плавающих колесных и гусеничных машин на базе использования достижений науки и техники, внесших много нового в теоретические положения и конструктивные решения. Расширился также круг вопросов, выдвигаемых практикой и требующих освещения на страницах печати.В связи с этим содержание книги при подготовке ко второму изданию было подвергнуто значительному пересмотру, в книгу внесен ряд дополнений и изменений, отражающих все новейшие достижения в развитии конструкций плавающих колесных и гусеничных машин. Главы II, III и IV дополнены описанием некоторых типов новых плавающих машин, машин с газотурбинными двигателями и двигателями непосредственного впрыска; при этом сохранено описание некоторых рассмотренных ранее машин, представляющих собой самостоятельный тип или характеризующих определенный этап в их развитии. Впервые рассматриваются схемы конструкций новых плавающих машин – автопоездов с активными и пассивными прицепными звеньями, переламывающегося автомобиля, а также схемы конструкций плавающих автомобилей, применяемых в качестве инженерных средств, и др. В главе V описаны принципы движения машин на подводных крыльях и аппаратов на воздушной подушке, позволяющих значительно увеличить скорость движения на воде. При переработке книги автор учел высказанные читателями замечания и пожелания, за что выражает всем откликнувшимся на его труд глубокую признательность. Книга рассчитана на широкий круг читателей, и прежде всего на водителей плавающих машин. Большую пользу для себя извлечет из нее каждый, кто захочет ознакомиться с основами теории и конструкции плавающих колесных и гусеничных машин.
В главе V описаны принципы движения машин на подводных крыльях и аппаратов на воздушной подушке, позволяющих значительно увеличить скорость движения на воде. При переработке книги автор учел высказанные читателями замечания и пожелания, за что выражает всем откликнувшимся на его труд глубокую признательность. Книга рассчитана на широкий круг читателей, и прежде всего на водителей плавающих машин. Большую пользу для себя извлечет из нее каждый, кто захочет ознакомиться с основами теории и конструкции плавающих колесных и гусеничных машин.This book, “Плавающие колесные и гусеничные машины”, by М.Г. Редькин, is a replication of a book originally published before 1966. It has been restored by human beings, page by page, so that you may enjoy it in a form as close to the original as possible.
15.06.01 Машиностроение : АлтГТУ
Сопроводительная документация
Подготовка аспирантов по направлению «Машиностроение» проводится в рамках профилей: «Технология машиностроения», «Технологии и машины обработки давлением» и «Колесные и гусеничные машины»
.
Формула специальности: Технология машиностроения – область технической науки, занимающаяся изучением связей и установлением закономерностей в процессе изготовления машин. Она призвана разработать теорию технологического обеспечения и повышения качества изделий машиностроения с наименьшей себестоимостью их выпуска. Изучение связей (механических, физических, размерных, временных, информационных, экономических и организационных) осуществляется с целью совершенствования существующих и создания новых технологических процессов и методов обработки и сборки изделий машиностроения требуемого качества с минимальными затратами труда, материальных и энергетических ресурсов.
Руководители: Леонов С.Л. (доктор теxнических наук, профессор), Ситников А.А. (доктор теxнических наук, профессор), Марков А.М. (доктор теxнических наук, профессор), Балашов А.В. (кандидат технических наук, доцент).
Формула специальности: Технологии и машины обработки давлением – область науки и техники, изучающая и формулирующая закономерности пластического деформирования различных материалов с целью создания технологий изготовления заготовок и изделий высокого качества, а также современных экономичных кузнечных, прессовых, штамповочных и прокатных машин, способных реализовать разработанные технологии. Изучение связей в системе заготовка – инструмент – машина и рациональный выбор способа приложения к заготовке деформирующих сил и технических характеристик машины позволяют снизить энергозатраты при работе машин, технологические отходы, улучшить условия труда, автоматизировать проектные работы и производство продукции.
Изучение связей в системе заготовка – инструмент – машина и рациональный выбор способа приложения к заготовке деформирующих сил и технических характеристик машины позволяют снизить энергозатраты при работе машин, технологические отходы, улучшить условия труда, автоматизировать проектные работы и производство продукции.
Руководитель: Поксеваткин М.И. (кандидат технических наук, профессор).
Формула специальности:
Колесные и гусеничные машины – область науки и техники, изучающая связи и закономерности в области теории движения, расчета, проектирования и испытаний безрельсовых транспортных средств с колесными и гусеничными движителями автомобильного, тракторного и сельскохозяйственного назначения. Изучение связей и закономерностей этой области науки осуществляется с целью решения задач по созданию новых и совершенствованию существующих транспортных средств, обладающих высоким качеством, повышенной производительностью и проходимостью, большой долговечностью, безопасностью в эксплуатации, высокими экологическими характеристиками с учетом полного жизненного цикла транспортных средств, а также технологичностью при производстве.
Руководитель: Коростелев С.А. (доктор технических наук, доцент).
Область профессиональной деятельности выпускников, освоивших программу аспирантуры, включает:
- совокупность средств, способов и методов деятельности, направленных на теоретическую разработку и экспериментальное исследование проблем, связанных с созданием конкурентоспособной отечественной продукции, пополнение и совершенствование базы знаний, национальной технологической среды, ее безопасности, передачу знаний;
- выявление и обоснование актуальности проблем машиностроения, технологических машин и оборудования, их проектирования, прикладной механики, автоматизации технологических процессов и производств различного назначения, конструкторско-технологического обеспечения машиностроительных производств, мехатроники и робототехники, а также необходимости их решения на базе теоретических и экспериментальных исследований, результаты которых обладают новизной и практической ценностью, обеспечивающих их реализацию как на производстве, так и в учебном процессе;
- создание новых (на уровне мировых стандартов) и совершенствование действующих технологий изготовления продукции машиностроительных производств, различных средств их оснащения;
- разработку новых и совершенствование современных средств и систем автоматизации, технологических машин и оборудования, мехатронных и робототехнических систем, систем автоматизации управления, контроля и испытаний, методов проектирования, математического, физического и компьютерного моделирования продукции, технологических процессов и машиностроительных производств, средств и систем их конструкторско-технологического обеспечения на основе методов кинематического и динамического анализа, синтеза механизмов, машин, систем и комплексов;
- работы по внедрению комплексной автоматизации и механизации производственных процессов в машиностроении, способствующих повышению технического уровня производства, производительности труда, конкурентоспособности продукции, обеспечению благоприятных условий и безопасности трудовой деятельности;
- технико-экономическое обоснование новых технических решений, поиск оптимальных решений в условиях различных требований по качеству и надежности создаваемых объектов машиностроения.

Объектами профессиональной деятельности выпускников, освоивших программу аспирантуры, являются:
- проектируемые объекты новых или модернизируемых машиностроительных производств различного назначения, их изделия, основное и вспомогательное оборудование, комплексы технологических машин и оборудования, инструментальная техника, технологическая оснастка, элементы прикладной механики, средства проектирования, механизации, автоматизации и управления, мехатронные и робототехнические системы;
- научно-обоснуемые производственные и технологические процессы машиностроительных производств, средства их технологического, инструментального, метрологического, диагностического, информационного и управленческого обеспечения;
- процессы, влияющие на техническое состояние объектов машиностроения;
- математическое моделирование объектов и процессов машиностроительных производств;
- синтезируемые складские и транспортные системы машиностроительных производств различного назначения, средства их обеспечения, технологии функционирования, средства информационных, метрологических и диагностических систем и комплексов;
- системы машиностроительных производств, обеспечивающие конструкторско-технологическую подготовку машиностроительного производства, управление им, метрологическое и техническое обслуживание;
- методы и средства диагностики, испытаний и контроля машиностроительной продукции, а также управления качеством изделий (процессов) на этапах жизненного цикла;
- программное обеспечение и его аппаратная реализация для систем автоматизации и управления производственными процессами в машиностроении.

Виды профессиональной деятельности, к которым готовятся выпускники, освоившие программу аспирантуры:
- научно-исследовательская деятельность в области проектирования и функционирования машин, приводов, информационно-измерительного оборудования и технологической оснастки, мехатроники и робототехнических систем, автоматических и автоматизированных систем управления производственными и технологическими процессами, систем конструкторской и технологической подготовки производства, инструментальной техники, новых видов механической и физико-технической обработки материалов, информационного пространства планирования и управления предприятием, программ инновационной деятельности в условиях современного машиностроения;
- преподавательская деятельность по образовательным программам высшего образования.
Программа аспирантуры направлена на освоение всех видов профессиональной деятельности, к которым готовится выпускник.
Код ТН ВЭД 8704439102.
 Новые, 4-гусеничные машины с двумя ведущими тележками для использования с устанавливаемыми на них подъемными машинами или машинами для разработки грунта, предназначенные для работы в заболоченных или снежных районах, с полной массой транспортного средства. Товарная номенклатура внешнеэкономической деятельности ЕАЭС Позиция ТН ВЭД
Новые, 4-гусеничные машины с двумя ведущими тележками для использования с устанавливаемыми на них подъемными машинами или машинами для разработки грунта, предназначенные для работы в заболоченных или снежных районах, с полной массой транспортного средства. Товарная номенклатура внешнеэкономической деятельности ЕАЭС Позиция ТН ВЭД
|
 ..
.. ..
.. ..
..Позиция ОКПД 2 Таможенные сборы Импорт
| Базовая ставка таможенной пошлины | 2% реш.  80 80 |
| Акциз | Не облагается |
| НДС | Технические средства для инвалидов Моторные транспортные средства.
0% – 26. Специально оборудованные средства транспорта, предназначенные исключительно для перевозки инвалидов, при наличии соответствующей записи в одобрении типа транспортного средства или свидетельстве о безопасности конструкции транспортного средства 20% – Прочие |
 . (НДС):
. (НДС):| Базовая ставка таможенной пошлины | Беспошлинно |
| Акциз | Не облагается |
Рассчитать контракт
Особенности товараЗагрузить особенности ИМ Загрузить особенности ЭК
ДЕСАНТНЫЕ ГУСЕНИЧНЫЕ МАШИНЫ.
 Бронетанковая техника армий капиталистических государств
Бронетанковая техника армий капиталистических государствДЕСАНТНЫЕ ГУСЕНИЧНЫЕ МАШИНЫ
С началом второй мировой войны в США начата разработка так называемых десантных гусеничных машин (LVT), которые представляли собой небронированные или частично бронированные плавающие транс портеры и изготовленные на их базе легкие плавающие танки.
По конструкции корпуса, ходовой части, обеспечению плавучести танки аналогичны транспортерам, на базе которых они изготовлены. Разница заключается в наличии у них бронирования, пушечного или гаубичного вооружения, устанавливаемого в башне, а также в компоновке основных агрегатов машины.
Особенностью этих плавающих машин является отсутствие гребного винта и рулей поворота. Движение их на воде, как и на суше, осуществляется посредством гусениц, траки которых шириной 360 мм снабжены резко выступающими съемными лопатками.
Поворот осуществляется торможением или полной остановкой одной из гусениц.
Для повышения запаса плавучести к бортам плавающих машин почти по всей длине прикреплены металлические понтоны, с внешней стороны которых предусмотрены прямоугольные вырезы для удобства посадки экипажа в машину.
Силовые передачи плавающих машин состоят из главного фрикциона, пятиступенчатой коробки передач, двойного дифференциала, используемого в качестве механизма поворота и бортовых редукторов.
В 1942-1944 гг. выпущены плавающие транспортеры серии LVT нескольких марок: LVT(l), LVT(2), LVT(3) и LVT (4).
Транспортеры LVT (Г) и LVT (2), выпущенные в 1942 г., представляют собой небронированные открытые сверху машины. Они различаются между собой боевым весом, габаритами (по длине), двигателями и грузоподъемностью. Их боевой вес соответственно 12,5 г и 11,1 г, мощность двигателей 146 л. с. и 250 л. е., грузоподъемность 2 и 3 г, максимальная скорость по суше 20 км/час и 32 км1час запас хода 360 км и 320 км на суше и 100 км и 95 км на воде.
На этих транспортерах двигатели устанавливаются в кормовой части и соединяются с силовой передачей, монтируемой в носовой части, посредством карданного вала, проходящего вдоль машины.
Транспортер LVT(2) вооружен четырьмя пулеметами.
Транспортер LVTA(2) отличается от транспортера LVT(2) тем, что верхняя часть его корпуса бронировапа. Это повысило его вес до 12,5 т и снизило грузоподъемность до 2,36 т. Машина оборудована радиостанцией.
Транспортер LVT(3) не бронирован и отличается от транспортера LVT(2) главным образом силовой установкой, состоящей из двух автомобильных двигателей «Кадиллак», имеющих несколько меньшую мощность (220 л. с.) и расположенных в связи с наличием откидной кормовой аппарели в передней части машины.
Транспортер LVT(3) вооружен двумя 7,62-мм пулеметами, он весит 11 т, имеет грузоподъемность 3,6 т, максимальную скорость движения 37 км/час на суше и 12 км/час на воде.
В 1949 г. транспортеры LVT(3) были оборудованы крышей и получили наименование LVT(3)c.
Транспортер LVT(4) представляет собой улучшенный вариант транспортера LVT(2). Он имеет грузоподъемность 4 т и вмещает до 30 человек. На нем установлен тот же звездообразный двигатель «Континенталь», что и на транспортере LVT(2), расположенный в передней части корпуса.
Транспортер вооружен четырьмя пулеметами калибра 7,62 мм. Кормовая деталь корпуса, так же как у транспортера LVT(3), выполнена откидной; подъем и опускание ее осуществляются посредством лебедки. В более поздних образцах этой машины надводная часть корпуса сделана бронированной. Кабина закрывается съемной броней, вследствие чего вес машины возрос до 16,5 г и скорость движения снизилась до 24 км/час на суше и 11 км/час на воде. Запас хода составляет на суше 240 км, на воде 160 км.
В 1943-1944 гг. были приняты на вооружение плавающие танки LVT/A (1) и LVT/A(4).
Танк LVT/A(1) построен на базе транспортера L.VT(2), но в отличие от него имеет полностью бронированный закрытый корпус и вращающуюся башню, заимствованную у легкого танка М3, в которой установлены 37-мм пушка и спаренный с ней 7,62-мм пулемет. Пушка снабжена гироскопическим стабилизатором в вертикальной плоскости наведения.
В качестве дополнительного вооружения устанавливается один зенитный пулемет в башне танка и один на круглом люке в кормовой части танка (за башней). Пулеметы монтируются на турельных установках.
Пулеметы монтируются на турельных установках.
Кормовые люки предназначены для посадки и высадки экипажа. и десанта и для погрузки грузов.
Компоновка агрегатов в этом танке та же, что и в транспортере LVT(2), т. е. двигатель расположен в кормовой части корпуса.
Танк весит около 15 т. Экипаж танка шесть человек. Максимальная скорость движения 32 км/час на. суше и 12 км/час на воде. Мощность двигателя 250 л. с.
Плавающий танк LVT/A(4) построен на базе плавающего транспортера LVT(4). В открытой башне этого танка, заимствованной у самоходной установки М8, установлена короткоствольная 75-мм гаубица с начальной скоростью снаряда 381 м/сек и дальностью стрельбы 8680 м. Кроме гаубицы, танк вооружен тремя пулеметами, два из которых смонтированы в башне в специальных установках и один в шаровой установке, в лобовом листе подбашенной коробки.
Корпус танка LVT/A(4) бронированный. Максимальная толщина брони корпуса 13 мм и башни 25,4 мм. Вес этого танка возрос до 18 т, а скорость движения: снизилась до 24 км/час на суше и 11 км/час на воде. Запас хода на суше 240 км, на воде 160 км. Удельное- давление на грунт 0,7 кг/см2 .
Запас хода на суше 240 км, на воде 160 км. Удельное- давление на грунт 0,7 кг/см2 .
Компоновка основных силовых агрегатов в танке отличается от компоновки их на транспортере LVT(4): силовое отделение расположено сзади и в нем установлен тот же двигатель, что и на транспортере. Танк оборудован радиостанцией.
Отработанный в 1947 г. плавающий танк LVT/A(5) отличается от танка LVT/A(4) в основном установкой стабилизатора вооружения в вертикальной плоскости наведения и некоторыми другими усовершенствованиями в оборудовании башни.
Всего за время второй мировой войны было выпущено около 18,5 тыс. десантных гусеничных машин. Они широко использовались на Тихоокеанском театре военных действий. При этом плавающие танки выполняли, по существу, роль самоходной артиллерии, поддерживающей своим огнем высадку десанта.
Вследствие больших габаритов, слабого бронирования и ограниченной маневренности на суше они не могли успешно применяться в боевых действиях сухопутных войск. Эти машины использовались главным образом, в десантных операциях по захвату и удержанию плацдарма на морском побережье.
Эти машины использовались главным образом, в десантных операциях по захвату и удержанию плацдарма на морском побережье.
В 1944-1945 гг. десантные гусеничные машины использовались в Европе, и в частности при форсировании р. Рейн в марте 1945 г. Организационно они были сведены в батальоны плавающих танков и бронетранспортеров.
В США была предпринята попытка создать плавающие самоходные пушки для обеспечения операций по форсированию водных преград и высадке десанта. Опытные образцы самоходных пушек Т86 и Т87 были созданы на базе противотанковой 76,2-мм САУ M18. ..Плавучесть машин обеспечивалась стальными понтонами, имевшими большие размеры и допускавшими ведение огня из пушек на плаву. Однако эти машины на вооружение приняты не были.
После второй мировой войны в США продолжается отработка новых десантных гусеничных бронированных машин для оснащения подразделений морской пехоты.
Вместе с тем на вооружении отдельных батальонов и рот плавающих транспортеров бронетанковых войск, а также в корпусе морской пехоты в качестве ограниченно стандартных еще сохранились транспортеры LVT(4) и плавающие танки LVT/A(4) и LVT(5). .Эти машины использовались в боевых действиях по высадке морского десанта в Корее в сентябре 1950 г., а также обеспечивали форсирование речных преград.
.Эти машины использовались в боевых действиях по высадке морского десанта в Корее в сентябре 1950 г., а также обеспечивали форсирование речных преград.
Большое количество десантных гусеничных машин поставлено армиям других капиталистических стран, в том числе Англии и Франции.
В начале 1950 г. отработана новая бронированная десантная гусеничная машина для перевозки личного «состава и различных грузов – бронетранспортер LVTP5, на базе которого построено семейство опытных образцов специальных десантных машин.
Вслед за бронетранспортером LVTP5 разработан опытный образец нового более легкого, маневренного и дешевого бронетранспортера LVTP6. Он имеет сходство с плавающим бронетранспортером М59, одинаковый с ним вес, но несколько больше его по размерам, что объясняется необходимостью обеспечения запаса плавучести, достаточного для действий в морских условиях.
На базе бронетранспортера LVTP6 отрабатывается гювое семейство более легких специальных десантных гусеничных машин.
В новых моделях десантных машин использованы двигатели и силовые передачи новых танков и бронетранспортеров; изменена конструкция ходовой части и подвески, улучшена маневренность и повышен запас хода.
В последних образцах десантных гусеничных маши» наблюдается тенденция к обеспечению универсальности, т. е. сочетанию возможности успешных действий как в морских десантных операциях, так и в боевых, действиях сухопутных войск.
Тактико-технические данные десантных гусеничных бронированных машин см. в табл. 6.
Бронетранспортер LVTP5 и машины, созданные на его базе
Десантная гусеничная машина LVTP5 (рис. 41) принята на вооружение корпуса морской пехоты в 1954 г. .
Рис. 41. Плавающий бронетранспортер LVTP5
В отличие от старых образцов десантных гусеничных машин бронетранспортер LVTP5 представляет собой полностью бронированную машину.
Закрытый сверху броневой корпус защищает экипаж и десант от ружейно-пулеметного огня и осколков снарядов.
Боевой вес машины около 37 т, грузоподъемность на воде около 5 т.
В новой модели скорость движения на суше увеличена до 48 км/час, а на воде до 11 км/час. Запас хода на суше около 290 км, на воде 80 км.
Экипаж бронетранспортера состоит из трех человек, а перевозимый десант из 29 человек.
В отличие от бронетранспортеров LVT(3) и LVT(4) аппарель для посадки и высадки десанта выполнена не в корме, а в лобовой части корпуса. Кроме того, в крыше бронетранспортера имеются запасные люки для экипажа, погрузки и выгрузки грузов, а также для доступа к силовому отделению, расположенному в задней части корпуса.
В передней части крыши корпуса справа и слева размещены люки механика-водителя и его помощника. Между этими люками размещается командирская башенка, в которой смонтирован 7,62-мм пулемет.
На бронетранспортере LVTP5 установлен 12-цилиндровый бензиновый двигатель «Континенталь» жидкостного охлаждения мощностью 810 л. с. и гидромеханическая силовая передача типа «Кросс-Драйв»; изменена конструкция подвески и ходовой части.
Машина имеет большие размеры, что вызвано стремлением обеспечить запас плавучести, достаточный для действий в морских условиях.
Для вождения машины ночью имеется инфракрасный перископ.
В настоящее время бронетранспортер LVTP5 производится и поступает на укомплектование частей корпуса морской пехоты.
В 1960 г. изготовлен опытный образец плавающего бронетранспортера LVTPX-10, созданный на базе бронетранспортера LVTP5. В отличие от машины LVTP5 в новом образце установлен газотурбинный двигатель (ГТД) мощностью 900 л. с.
Общий вес нового силового агрегата (двигатель и коробка передач) 1450 кг, в то время как поршневой двигатель «Континенталь» и гидромеханическая силовая передача «Кросс-Драйв» машины LVTP5 весят 2950 кг.
Пространство, занимаемое ГТД и бензиновым двигателем, составляет соответственно 0,25 ж3 и 1,84 ж3 . Сокращение объема, занимаемого ГТД, и размещение его над силовой передачей позволили передвинуть назад на 1,5 ж перегородку силового отделения и увеличить за счет этого объем десантного отделения на 5,9 ж3 , или на 33%.
Грузоподъемность новой машины увеличится по сравнению с LVTP5 более чем на 2 г, а скорость повысится на 30%. Бронетранспортер, оснащенный ГТД, сможет вместить до 46 человек десанта.
Обороты ГТД снижаются до 6000 в минуту посредством редуктора, от которого крутящий момент передается через дополнительную передачу на параллельный вал, расположенный под двигателем. Этот вал, соединённый с силовой передачей посредством конических шестерен, вращается со скоростью ~ 5500 об/мин.
Рис. 42. Плавающий танк LVTH6
Воздух для ГТД засасывается через впускную трубу, помещенную на крыше бронетранспортера, и, пройдя воздушный фильтр, попадает в силовое отделение. Отработавшие газы от ГТД выходят через аналогичную выпускную трубу, расположенную на противоположной стороне машины.
На базе бронетранспортера LVTP5 изготовлен плавающий танк LVTH6 (рис. 42), который принят на вооружение корпуса морской пехоты в 1955 г.
Танк вооружен 105-мм гаубицей, установленной в закрытой вращающейся башне, которая выполнена в форме усеченного конуса; 12,7-мм зенитный пулемет смонтирован на крыше башни. По конструкция корпуса, устройству и компоновке агрегатов бронетранспортер LVTP5 и танк LVTH6 одинаковы.
По конструкция корпуса, устройству и компоновке агрегатов бронетранспортер LVTP5 и танк LVTH6 одинаковы.
Боевой вес танка LVTH6 около 38 г, экипаж шесть человек.
На базе бронетранспортера LVTP5 разрабатывались опытные образцы плавающей зенитной самоход? ной установки LVTAAX1, в башне которой установлены спаренные 40-мм автоматические пушки «Бофорс», плавающей инженерной машины LVTEX1 с бульдозером и плавающей ремонтно-эвакуационной машины LVTR1.
Эти образцы на вооружение приняты не были.
Рис. 43. Плавающий бронетранспортер LVTP6
Бронетранспортер LVTP6 и машины, созданные на его базе
Плавающий бронетранспортер LVTP6 (рис. 43) изготовлен в 1954 г. и является дальнейшим развитием десантных машин. Он значительно меньше по размерам, чем плавающий бронетранспортер LVTP5, легче по весу, дешевле и более маиеврен.
Он способен перевозить десант в количестве 20 человек с полным снаряжением.
Закрытый броневой корпус бронетранспортера LVTP6 защищает экипаж и десант от пулеметного огня и осколков снарядов.
Бортовые броневые листы корпуса расположены вертикально. На крыше корпуса спереди слева размещена смотровая башенка водителя с люком и перископическими приборами наблюдения.
Спереди справа размещена командипская башенка с установленными в ней 12,7-мм пулеметом и перископами.
У каждого борта корпуса сверху имеется по два воздухозаборника. В кормовой части крыши, над отделением для десанта, расположен двухстворчатый люк.
Рис. 44, Плавающий танк LVTHX4
Силовая установка мощностью около 400 л. с. обеспечивает максимальную скорость движения на суше 50 км/час и на воде 11 км/час.
Ходовая часть по сравнению с машиной LVTP5 изменена. В ней использовано по пяти опорных катков на сторону аналогично бронетранспортерам М59 и М113.
Для вождения машины ночью имеется инфракрасный перископ.
Запас хода машины на суше 290 км, на воде 80 км.
На базе бронетранспортера LVTP6 разрабатывалось семейство новых плавающих машин: танк LVTHX4 (рис. 44) со 105-мм гаубицей Т96Е1, зенитная самоходная установка 40-мм пушек LVTAAX2 и самоходный 106,7-мм миномет.
44) со 105-мм гаубицей Т96Е1, зенитная самоходная установка 40-мм пушек LVTAAX2 и самоходный 106,7-мм миномет.
На вооружение эти машины приняты не были.
Курганмашзавод (КМЗ) – производитель МКСМ, вездеход ТМ-140, легковые прицепы
ПАО «Курганмашзавод», основанное в 1950 году, является одним из лидеров военно-промышленного комплекса России и единственным предприятием в стране, выпускающим легендарные боевые машины пехоты (БМП). В 2019 году предприятие вошло в состав ГК «Ростех».
На сегодняшний день ПАО «Курганмашзавод» является крупным производственным комплексом, оснащённым самым современным оборудованием, обеспечивающим полный цикл по освоению производства различной высокотехнологической машиностроительной продукции, начиная от разработки конструкторской документации и сборки опытных образцов, до постановки изделий в серийное производство.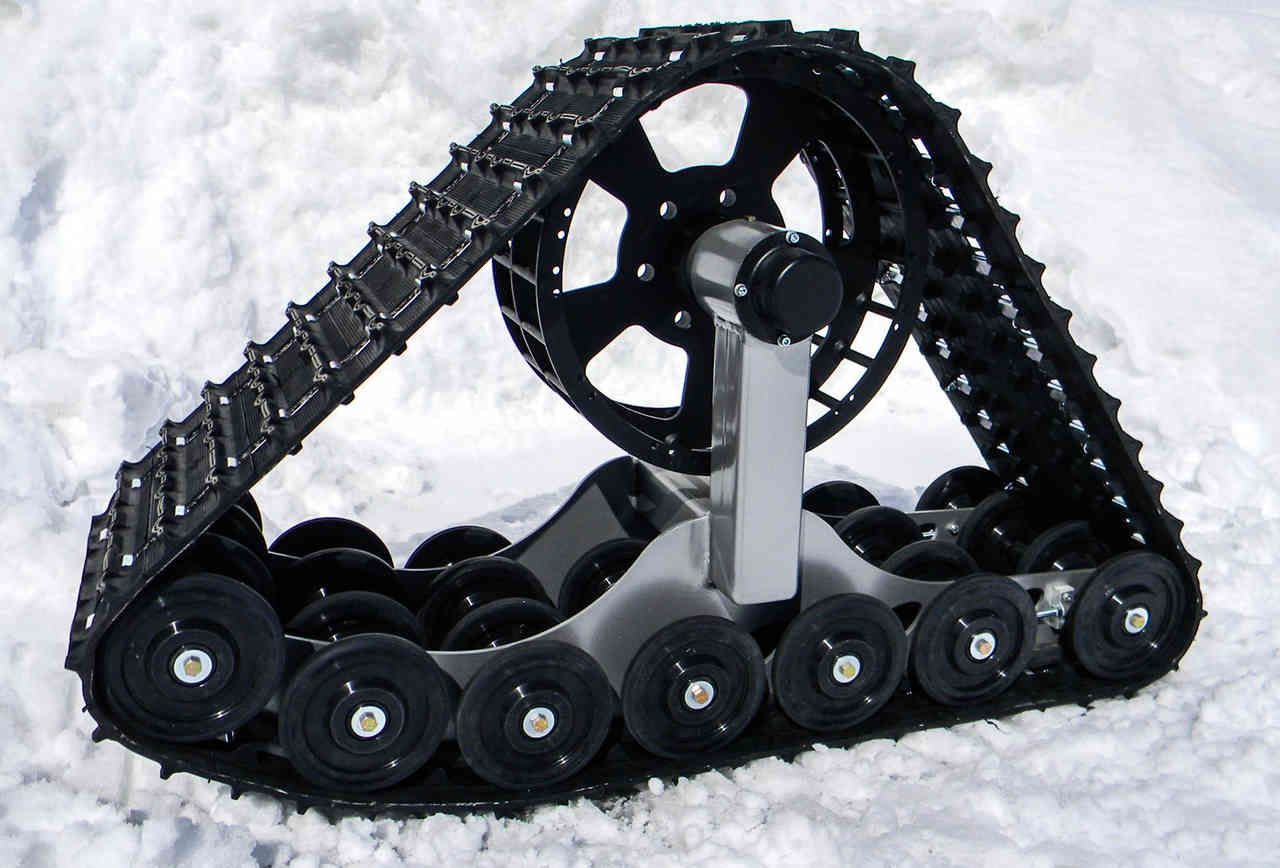 Предприятие обеспечивает все свои потребности по любым видам термо- и механической обработке деталей любой сложности.
Предприятие обеспечивает все свои потребности по любым видам термо- и механической обработке деталей любой сложности.
За последние 30 лет на предприятии освоен выпуск широкого ассортимента продукции гражданского назначения, успевшей хорошо зарекомендовать себя у потребителей. В их числе:
мини-погрузчики с бортовым поворотом семейства МКСМ;
гусеничные плавающие вездеходы семейства ТМ;
гусеничные машины для лесозаготовительных работ;
автомобильные прицепы;
Производственные мощности компании включают в себя, в том числе, и собственное кузнечно-литейное производство с объемом выпуска готовой продукции до 2,5 тыс. тонн в месяц. Специализация кузнечно-литейного производства это изготовление отливок, поковок, штамповок по чертежам заказчика из различных углеродистых, легированных, износостойких сталей, чугунов со специальными свойствами, алюминиевых, никелевых, кобальтовых, стеллитовых и жаропрочных сплавов.
Наиболее востребованная продукция кузнечно-литейного производства:
звенья гусениц, гусеничные ленты, ведущие колёса и звёздочки;
запорная арматура различного назначения, задвижки шиберные, клапаны;
било, молотки, билодержатели, футеровки.
Потребителями гражданской продукции ПАО «Курганмашзавод» являются крупнейшие предприятия России и стран ближнего зарубежья следующих отраслей:
предприятия строительной и дорожной отрасли;
горнодобывающая и горнорудная промышленность;
предприятия нефтехимической и нефтегаздобывающей отрасли;
машиностроение и сельское хозяйство;
предприятия энергетической отрасли;
авиастроительные и судостроительные компании;
предприятия ЖКХ.
гусеничного автомобиль Prinoth Корпоративного
 2s”> соприкоснуться
2s”> соприкоснутьсяAfghanistanÅlandAlbaniaAlgeriaAmerican SamoaAndorraAngolaAnguillaAntarcticaAntigua и BarbudaArgentinaArmeniaArubaAustraliaAustriaAzerbaijanBahrainBangladeshBarbadosBelarusBelgiumBelizeBeninBermudaBhutanBoliviaBonaire, Синт-Эстатиус и SabaBosnia и HerzegovinaBotswanaBouvet IslandBrazilBritish Индийского океана TerritoryBritish Virgin IslandsBruneiBulgariaBurkina FasoBurundiCambodiaCameroonCanadaCape VerdeCayman IslandsCentral африканского RepublicChadChileChinaChristmas IslandCocos (Килинг) IslandsColombiaComorosCongoCongo-BrazzavilleCook IslandsCosta RicaCôte d’IvoireCroatiaCubaCuraçaoCyprusCzech RepublicDenmarkDjiboutiDominicaDominican RepublicEcuadorEgyptEl SalvadorEquatorial ГвинеяЭритреяЭстонияЭфиопияФолклендские островаФарерские островаФиджиФинляндияФранцияФранцузская ГвианаФранцузская ПолинезияФранцузские Южные ТерриторииГабонГамбияГрузияГерманияГанаГибралтарГрецияГренландияГренадаГваделупаГуамГватемалаГернсиГвинеяГвинея- Остров BissauGuyanaHaitiHeard и McDonald IslandsHondurasHong Kong SAR от ChinaHungaryIcelandIndiaIndonesiaIranIraqIrelandIsle из ManIsraelItalyJamaicaJapanJerseyJordanKazakhstanKenyaKiribatiKosovoKuwaitKyrgyzstanLaosLatviaLebanonLesothoLiberiaLibyaLiechtensteinLithuaniaLuxembourgMacao САР ChinaMacedoniaMadagascarMalawiMalaysiaMaldivesMaliMaltaMarshall IslandsMartiniqueMauritaniaMauritiusMayotteMexicoMicronesiaMoldovaMonacoMongoliaMontenegroMontserratMoroccoMozambiqueMyanmarNamibiaNauruNepalNetherlandsNetherlands AntillesNew CaledoniaNew ZealandNicaraguaNigerNigeriaNiueNorfolk IslandNorth KoreaNorthern MarianasNorwayOmanPakistanPalauPalestinePanamaPapua Новый GuineaParaguayPeruPhilippinesPitcairn IslandsPolandPortugalPuerto RicoQatarReunionRomaniaRussiaRwandaSaint BarthélemySaint Елены, Вознесения и Тристан-да CunhaSaint Китса и NevisSaint LuciaSaint MartinSaint Пьер и MiquelonSaint Винсент и GrenadinesSamoaSan MarinoSão Tomé е PríncipeSaudi ArabiaSenegalSerbiaSerbia ан d MontenegroSeychellesSierra LeoneSingaporeSint MaartenSlovakiaSloveniaSolomon IslandsSomaliaSouth AfricaSouth Джорджия и Южные Сандвичевы IslandsSouth KoreaSouth SudanSpainSri LankaSudanSurinameSvalbardSwazilandSwedenSwitzerlandSyriaTaiwanTajikistanTanzaniaThailandThe BahamasTimor-LesteTogoTokelauTongaTrinidad и TobagoTunisiaTurkeyTurkmenistanTurks и Кайкос IslandsTuvaluUgandaUkraineUnited арабских EmiratesUnited KingdomUnited Штаты Экваторияльная IslandsUnited Штаты AmericaUruguayUS Девы IslandsUzbekistanVanuatuVatican CityVenezuelaVietnamWallis и FutunaWestern SaharaYemenZambiaZimbabwe
Бизнес-единица: PRINOTH CorporateSnow GroomersTracked VehiclesVegetation управления
После того, как вы отправите контактную форму, вышеупомянутые данные будут обработаны стороной, ответственной за защиту данных, с целью обработки вашего запроса на основании вашего согласия, данного при отправке формы. Если вы не откажетесь, данные будут обрабатываться на той же правовой основе в целях прямого маркетинга, что совместимо с первоначальной целью обработки. Данные не передаются другим получателям. Дополнительную информацию можно найти в нашей политике конфиденциальности.
Если вы не откажетесь, данные будут обрабатываться на той же правовой основе в целях прямого маркетинга, что совместимо с первоначальной целью обработки. Данные не передаются другим получателям. Дополнительную информацию можно найти в нашей политике конфиденциальности.Отправить
Гусеничные машины
Современные бронированные гусеничные машины должны обеспечивать максимальную защиту, защиту и мобильность, сохраняя при этом доступность. Полноприводная трансмиссия Allison Military Series, объединяющая силовые установки, рулевое управление и тормозную систему в одном компактном корпусе, достигает цели за счет максимальной производительности и минимизации затрат на эксплуатацию и поддержку (O&S) для конечного пользователя.
Производительность
Высокопроизводительные поперечные приводы Allison Military Series оптимизируют подвижность автомобиля в любых условиях местности. Технология Continuous Power Technology ™ от Allison позволяет нашим полностью автоматическим поперечным приводам просто и плавно подавать непрерывную мощность двигателя на гусеницы. Наши высокоэффективные поперечные передачи обеспечивают максимальную пусковую способность, способность преодолевать подъемы и ускорение за счет минимизации потерь мощности на трение и нагрев. Встроенное бесступенчатое рулевое управление и тормозная система с масляным охлаждением обеспечивают превосходную маневренность.Такое плавное, точное и предсказуемое управление машиной, даже при неработающем двигателе, повышает устойчивость машины и точность стрельбы на ходу. Коробки отбора мощности (ВОМ), установленные на трансмиссии, обеспечивают гибкость установки и возможность подачи питания на специальное оборудование, установленное на транспортном средстве, такое как гидравлические насосы и механические приводы вентиляторов. Наши трансмиссии также подходят для современных высокооборотных дизельных двигателей. Для пользовательских приложений у Allison есть все возможности для проектирования, разработки, закупок и производства.
Наши высокоэффективные поперечные передачи обеспечивают максимальную пусковую способность, способность преодолевать подъемы и ускорение за счет минимизации потерь мощности на трение и нагрев. Встроенное бесступенчатое рулевое управление и тормозная система с масляным охлаждением обеспечивают превосходную маневренность.Такое плавное, точное и предсказуемое управление машиной, даже при неработающем двигателе, повышает устойчивость машины и точность стрельбы на ходу. Коробки отбора мощности (ВОМ), установленные на трансмиссии, обеспечивают гибкость установки и возможность подачи питания на специальное оборудование, установленное на транспортном средстве, такое как гидравлические насосы и механические приводы вентиляторов. Наши трансмиссии также подходят для современных высокооборотных дизельных двигателей. Для пользовательских приложений у Allison есть все возможности для проектирования, разработки, закупок и производства.
Затраты на эксплуатацию и поддержку (O&S)
Крестообразные приводы Allison Military Series спроектированы и изготовлены с учетом низких затрат на эксплуатацию и поддержку (O&S). Наши группы по закупкам и производству постоянно стремятся к доступности деталей и процессов, которые вместе создают наши поперечные приводы. Из-за простоты эксплуатации требуется лишь минимальное обучение, чтобы научить водителя работать с кросс-приводом Allison. Во время работы встроенные датчики и передовые программные алгоритмы работают вместе, чтобы обеспечить встроенную защиту трансмиссии от разрушительных ударов при переключении передач, превышения скорости, переключения передач и других потенциально опасных условий.В результате плановое техническое обслуживание сводится к регулярной замене масла и фильтров. Непревзойденная надежность и долговечность, являющиеся результатом надежной конструкции и технологий производства Allison, увеличивают время безотказной работы автомобиля и снижают затраты на ремонт и техническое обслуживание. Эта надежность и долговечность также снижают частоту и объем капитальных ремонтов на уровне депо, что еще больше снижает затраты.
Наши группы по закупкам и производству постоянно стремятся к доступности деталей и процессов, которые вместе создают наши поперечные приводы. Из-за простоты эксплуатации требуется лишь минимальное обучение, чтобы научить водителя работать с кросс-приводом Allison. Во время работы встроенные датчики и передовые программные алгоритмы работают вместе, чтобы обеспечить встроенную защиту трансмиссии от разрушительных ударов при переключении передач, превышения скорости, переключения передач и других потенциально опасных условий.В результате плановое техническое обслуживание сводится к регулярной замене масла и фильтров. Непревзойденная надежность и долговечность, являющиеся результатом надежной конструкции и технологий производства Allison, увеличивают время безотказной работы автомобиля и снижают затраты на ремонт и техническое обслуживание. Эта надежность и долговечность также снижают частоту и объем капитальных ремонтов на уровне депо, что еще больше снижает затраты.
Гусеничная машина – обзор
2.
 3.2 Сейсморазведка
3.2 СейсморазведкаВозможно, самый большой прорыв в разведке природного газа произошел благодаря использованию сейсмологии .
Сейсмология — это изучение движения энергии в виде сейсмических волн через земную кору, которое по-разному взаимодействует с различными типами подземных образований. Сейсмограф , прибор, используемый для обнаружения и регистрации землетрясений, способен улавливать и регистрировать колебания Земли, возникающие во время землетрясения. Когда сейсмология применяется для поиска природного газа, сейсмические волны, излучаемые источником, направляются в Землю, и сейсмические волны по-разному взаимодействуют с подземными образованиями (подземными слоями), каждый со своими свойствами.Волны отражаются обратно к источнику каждой формацией. Именно это отражение позволяет использовать сейсмологию для обнаружения характера и свойств подземных формаций, что приводит к выводам о потенциальной возможности содержания природного газа в одной или нескольких формациях.
На заре сейсморазведки сейсмические волны создавались с помощью динамита. Эти тщательно спланированные небольшие взрывы создавали необходимые сейсмические волны, которые затем улавливались сейсмоприемниками, генерируя данные для интерпретации геофизиками, геологами и инженерами-разработчиками.
На практике использование сейсмологии для исследования береговых территорий включает искусственное создание сейсмических волн, отражение которых затем улавливается чувствительными элементами оборудования ( сейсмоприемники ), заглубленными в землю. Данные, собранные этими сейсмоприемниками, затем передаются на сейсморегистратор, который записывает данные для дальнейшей интерпретации. Источник сейсмических волн (обычно заданный подземный взрыв) создает вибрации, которые отражаются от различных слоев Земли, улавливаются сейсмоприемниками на поверхности и передаются на сейсморегистратор для интерпретации и регистрации.
Кроме того, из-за экологических проблем и усовершенствованных технологий часто невозможно использовать заряды взрывчатых веществ для создания необходимых сейсмических волн. Вместо этого большинство сейсмических бригад используют технологию невзрывной сейсморазведки для получения необходимых данных. Эта невзрывная технология обычно предполагает использование большой тяжелой колесной или гусеничной машины со специальным оборудованием, предназначенным для создания сильного удара или серии вибраций. Эти удары или вибрации создают сейсмические волны, подобные тем, которые создает динамит.В показанном сейсмическом грузовике большой поршень в середине используется для создания вибраций на поверхности Земли, посылая сейсмические волны, которые используются для получения полезных данных.
Вместо этого большинство сейсмических бригад используют технологию невзрывной сейсморазведки для получения необходимых данных. Эта невзрывная технология обычно предполагает использование большой тяжелой колесной или гусеничной машины со специальным оборудованием, предназначенным для создания сильного удара или серии вибраций. Эти удары или вибрации создают сейсмические волны, подобные тем, которые создает динамит.В показанном сейсмическом грузовике большой поршень в середине используется для создания вибраций на поверхности Земли, посылая сейсмические волны, которые используются для получения полезных данных.
Такой же процесс используется в морской сейсморазведке . При разведке природного газа, который может находиться на глубине тысяч футов ниже морского дна, а сам он может находиться на высоте тысяч футов ниже уровня моря, используется несколько иной метод сейсморазведки. Вместо грузовиков и геофонов для сбора сейсмических данных используется корабль.Вместо сейсмоприемников в морской разведке используются гидрофоны , которые предназначены для улавливания сейсмических волн под водой. Эти гидрофоны буксируются за кораблем в различных конфигурациях в зависимости от потребностей геофизика. Вместо динамита или ударов по морскому дну сейсморазведчик использует большую воздушную пушку, которая выпускает под водой потоки сжатого воздуха, создавая сейсмические волны, которые могут проходить сквозь земную кору и генерировать необходимые сейсмические отражения.
Эти гидрофоны буксируются за кораблем в различных конфигурациях в зависимости от потребностей геофизика. Вместо динамита или ударов по морскому дну сейсморазведчик использует большую воздушную пушку, которая выпускает под водой потоки сжатого воздуха, создавая сейсмические волны, которые могут проходить сквозь земную кору и генерировать необходимые сейсмические отражения.
Развитие трехмерной сейсмической визуализации сильно изменило характер разведки природного газа. Эта технология использует традиционные методы построения сейсмических изображений в сочетании с мощными компьютерами и процессорами для создания трехмерной (3-D) модели подземных слоев. Четырехмерная (4-D) сейсмология расширяет это, добавляя время в качестве измерения, что позволяет исследовательским группам наблюдать, как характеристики недр изменяются с течением времени. Теперь геологоразведочные бригады могут легче находить перспективные участки природного газа, более эффективно размещать скважины, сокращать количество пробуренных сухих скважин, снижать затраты на бурение и сокращать время разведки.
За последние два десятилетия стало относительно легко использовать компьютеры для сбора сейсмических данных, собранных в полевых условиях. Это позволяет обрабатывать гораздо большие объемы данных, повышая достоверность и информативность сейсмической модели. Существует три основных типа компьютерных разведочных моделей: двумерные (2-D), 3-D и совсем недавно 4-D. Эти методы построения изображений, основанные в основном на сейсмических данных, полученных в полевых условиях, становятся все более и более сложными.Компьютерные технологии продвинулись настолько далеко, что теперь можно включать данные, полученные в результате различных типов испытаний, таких как каротаж, информация о добыче и гравиметрические испытания, которые можно объединить для создания «визуализации» подземного пласта. Таким образом, геологи и геофизики могут объединить все свои источники данных, чтобы составить одно четкое и полное представление о подземной геологии. Примером этого является использование интерактивного компьютера геологом для визуализации сейсмических данных, что позволяет исследовать подповерхностные слои.
Двухмерная сейсмическая визуализация относится к использованию данных, собранных в ходе сейсморазведочных работ, для построения картины поперечного сечения подземных формаций. Геофизик интерпретирует сейсмические данные, полученные в полевых условиях, делая записи вибрации сейсмографа и используя их для разработки концептуальной модели состава и толщины различных слоев горных пород под землей. Этот процесс обычно используется для картирования подземных образований и для оценки геологических структур, чтобы определить, где могут существовать залежи.
Также существует метод, использующий базовые сейсмические данные, известный как прямое обнаружение , в котором белые полосы ( яркие пятна ), которые часто появлялись на полосах сейсмических записей, указывали на резервуары углеводородов. Природа или пористая порода, содержащая природный газ, часто могут отражать более сильные сейсмические отражения, чем обычная, заполненная водой порода. Следовательно, в этих условиях фактический резервуар природного газа может быть обнаружен непосредственно по сейсмическим данным. Однако эта концепция не является универсально применимой, поскольку многие из ярких пятен не содержат углеводородных производных, а многие месторождения углеводородных производных не обозначены яркими пятнами на сейсмических данных.
Однако эта концепция не является универсально применимой, поскольку многие из ярких пятен не содержат углеводородных производных, а многие месторождения углеводородных производных не обозначены яркими пятнами на сейсмических данных.
Одним из крупнейших недавних нововведений в области автоматизированных методов разведки стала разработка трехмерного сейсмического изображения . Трехмерное изображение использует данные сейсмического поля для создания трехмерной картины подземных образований и геологических особенностей.Это, по сути, позволяет геофизику и геологу увидеть четкую картину состава земной коры в той или иной местности. Таким образом, при разведке природного газа фактическое изображение можно использовать для оценки вероятности существования пластов в конкретном районе и характеристик этого потенциального пласта. Эта технология оказалась чрезвычайно успешной в повышении успешности разведочных работ. По оценкам, использование трехмерной сейсмической визуализации повышает вероятность успешного определения местонахождения коллектора на 50 %.
Хотя эта технология очень полезна, она также очень дорогая. Генерация трехмерных изображений требует сбора данных из нескольких тысяч мест, в отличие от двумерных изображений, для которых требуется всего несколько сотен точек данных. Таким образом, трехмерное изображение является гораздо более сложным и длительным процессом. Поэтому его обычно используют в сочетании с другими методами разведки. Например, геофизик может использовать традиционное двухмерное моделирование и изучение геологических особенностей, чтобы определить вероятность наличия природного газа.После использования этих основных методов трехмерное сейсмическое изображение можно использовать только в тех областях, которые с высокой вероятностью содержат резервуары. Трехмерная сейсмическая визуализация позволяет не только определять местонахождение залежей природного газа и сырой нефти, но и более точно размещать скважины, которые необходимо пробурить. Это увеличивает производительность успешных скважин, позволяя извлекать больше природного газа и сырой нефти из-под земли.
Одним из последних достижений в области сейсморазведки и моделирования подземных горных пород стало введение 4-D сейсмического изображения .Этот тип визуализации является расширением технологии трехмерной визуализации. Однако вместо получения простого статического изображения подземной части в четырехмерном изображении наблюдаются изменения структур и свойств подземных образований с течением времени (четвертое измерение). Следовательно, этот метод также упоминается как 4-D цейтраферная визуализация .
Различные сейсмические данные определенной местности снимаются в разное время, и эта последовательность данных вводится в мощный компьютер. Различные изображения объединяются, чтобы создать своего рода «кино» о том, что происходит под землей.Изучая, как сейсмические изображения меняются с течением времени, геологи могут лучше понять многие свойства горных пород, включая поток подземных флюидов, вязкость, температуру и насыщенность. Геологи также могут использовать четырехмерные сейсмические изображения для оценки свойств коллектора, включая скорость истощения запасов природного газа после начала добычи.
Гусеничная машина
Гусеничная машина (также называемая гусеничным трактором, гусеничным трактором или гусеничной машиной) — это транспортное средство, которое движется по сплошным гусеницам вместо колес.К гусеничным транспортным средствам относятся строительные машины, военные бронированные машины и беспилотные наземные транспортные средства.
Основные конструктивные преимущества гусеничных транспортных средств по сравнению с колесными состоят в том, что они соприкасаются с большей площадью поверхности, чем обычно бывает в случае колесных транспортных средств, и в результате оказывают гораздо меньшее усилие на единицу площади проходимой земли, чем обычная колесная машина того же веса. Это делает их подходящими для использования на мягком грунте с низким коэффициентом трения и на неровной поверхности, такой как грязь, лед и снег.Основным недостатком является то, что гусеницы представляют собой более сложный механизм, чем колесо, и относительно подвержены отказам, таким как поломка или сход гусениц с рельсов.
История
Длинная череда патентов оспаривает, кто был «создателем» этой концепции.
Было большое количество проектов, в которых пытались создать механизм укладки гусениц, хотя эти конструкции в целом не напоминают современные гусеничные машины. [1] [2] [3]
Блинов
В 1877 году русский Федор Абрамович Блинов создал гусеничную повозку, получившую название «повозка, передвигающаяся по бесконечным рельсам» (гусеницам). [4] У него не было самодвижения, и он был запряжен лошадьми. В следующем году Блинов получил патент на свой «универсал». Позже, в 1881-1888 годах, он создал паровой гусеничный трактор. Этот гусеничный самоход успешно прошел испытания и был показан на фермерской выставке в 1896 году. [4]
Динсмур
Согласно журналу Scientific American Чарльз Динсмур из Уоррена, штат Пенсильвания, изобрел «транспортное средство» с бесконечными гусеницами. В статье дается подробное описание бесконечных гусениц, а иллюстрации очень похожи на современные гусеничные машины. [5] Изобретение запатентовано 2 ноября 1886 г. под № 351749. [6] [7]
[5] Изобретение запатентовано 2 ноября 1886 г. под № 351749. [6] [7]
Ломбард
Восстановленный ломбардный паровой бревенчатый тягачЭлвин О. Ломбард из Уотервилля, штат Мэн, в 1901 году получил патент на ломбардный паровой бревенчатый тягач, который напоминает обычный железнодорожный паровоз с управлением салазками спереди и гусеничными тележками сзади для перевозки бревен на северо-востоке США и Канады. [ цитирование ] Самосвалы разрешали вывозить целлюлозу в реки зимой.До этого лошадей можно было использовать только до тех пор, пока глубина снега не делала буксировку невозможной. Ломбард начал коммерческое производство, которое продолжалось примерно до 1917 года, когда основное внимание было полностью переключено на машины с бензиновым двигателем. Самосвал с бензиновым двигателем выставлен в Государственном музее штата Мэн в Огасте, штат Мэн.
Хорнсби/Холт/Феникс
Модель трактора Hornsby После того, как Lombard начала свою деятельность, Hornsby в Англии изготовила как минимум две полноразмерные машины с «гусеничным управлением», и их патент был позже приобретен Холтом в 1913 году, что позволило Холту претендовать на звание «изобретателя» гусеничного трактора. [8] Поскольку «танк» был британской концепцией, более вероятно, что Hornsby, который был построен и безуспешно передан их вооруженным силам, был источником вдохновения.
[8] Поскольку «танк» был британской концепцией, более вероятно, что Hornsby, который был построен и безуспешно передан их вооруженным силам, был источником вдохновения.
В патентном споре с участием конкурирующего производителя гусеничных машин Беста были получены показания людей, в том числе Ломбарда, о том, что Холт инспектировал ломбардский самосвал, отправленный в западный штат людьми, которые позже построили лесовоз Феникс в О-Клэр, штат Висконсин. по лицензии Ломбардии. [ цитирование требуется ] Phoenix Centipeed обычно имел более причудливую деревянную кабину, рулевое колесо, наклоненное вперед под углом 45 градусов, и вертикальные, а не горизонтальные цилиндры.
Линн
Тем временем компания Lombard построила дом на колесах с бензиновым двигателем для Холмана Гарри (Фланнери) Линна из Старого города, штат Мэн, чтобы тянуть фургон с оборудованием для его выставки собак и пони, напоминающий троллейбус, только с колесами впереди и гусеницами Lombard внутри. задний. Линн до этого экспериментировала с бензиновыми и паровыми автомобилями и шестиколесным приводом и в какой-то момент устроилась на работу к Ломбарду в качестве демонстратора, механика и торгового агента. Это привело к вопросу о праве собственности на патент после того, как в 1909 году для замены более крупного дома на колесах был построен единственный задний гусеничный бензиновый дорожный двигатель трехопорного типа из-за проблем со старыми живописными деревянными мостами.Этот спор привел к тому, что Линн покинул Мэн и переехал в Моррис, штат Нью-Йорк, чтобы построить улучшенный контур с гибким запаздывающим гусеничным ходом или гусеничным ходом с независимой полугусеничной подвеской, работающей на бензине, а затем и на дизельном топливе. Хотя некоторые из них были доставлены для использования в военных целях в период с 1917 по 1946 год, Linn так и не получила крупных военных заказов. Большая часть производства в период с 1917 по 1952 год, около 2500 единиц, была продана напрямую дорожным службам и подрядчикам.
задний. Линн до этого экспериментировала с бензиновыми и паровыми автомобилями и шестиколесным приводом и в какой-то момент устроилась на работу к Ломбарду в качестве демонстратора, механика и торгового агента. Это привело к вопросу о праве собственности на патент после того, как в 1909 году для замены более крупного дома на колесах был построен единственный задний гусеничный бензиновый дорожный двигатель трехопорного типа из-за проблем со старыми живописными деревянными мостами.Этот спор привел к тому, что Линн покинул Мэн и переехал в Моррис, штат Нью-Йорк, чтобы построить улучшенный контур с гибким запаздывающим гусеничным ходом или гусеничным ходом с независимой полугусеничной подвеской, работающей на бензине, а затем и на дизельном топливе. Хотя некоторые из них были доставлены для использования в военных целях в период с 1917 по 1946 год, Linn так и не получила крупных военных заказов. Большая часть производства в период с 1917 по 1952 год, около 2500 единиц, была продана напрямую дорожным службам и подрядчикам. Стальные гусеницы и грузоподъемность позволяли этим машинам работать на местности, где резиновые шины более низкого качества, существовавшие до середины 1930-х годов, обычно бесполезно вращались или полностью рвались. [ ссылка необходима ]
Стальные гусеницы и грузоподъемность позволяли этим машинам работать на местности, где резиновые шины более низкого качества, существовавшие до середины 1930-х годов, обычно бесполезно вращались или полностью рвались. [ ссылка необходима ]
Linn была пионером в уборке снега до того, как эта практика стала применяться в сельской местности, с девятифутовым стальным v-образным плугом и шестнадцатифутовыми регулируемыми выравнивающими крыльями с каждой стороны. После того, как система автомагистралей была заасфальтирована, уборку снега можно было производить с помощью полноприводных грузовиков, оснащенных шинами улучшенной конструкции, и Linn стал внедорожным транспортным средством для лесозаготовок, добычи полезных ископаемых, строительства плотин, исследования Арктики и т. д. ]
Слоан
После того, как стальные шипы стали непопулярны на дорогах с твердым покрытием, в 1938 году начался ограниченный эксперимент по преодолению разрыва между грузовиком и трактором, «кабриолет», запатентованный Филиппом Слоаном, C5 Catruk, имел конструктивные недостатки и ограниченное производство, прежде чем от него окончательно отказались. . [ ссылка необходима ]
. [ ссылка необходима ]
Судьба пионерских обществ
Производство бензина в Ломбардии было более ограниченным, поскольку им так и не удалось диверсифицировать использование, кроме перевозки бревен; считается, что дизель, построенный в 1934 году, был их последним агрегатом.
Феникс из О-Клэр, штат Висконсин, похоже, построил по крайней мере одну машину с бензиновым двигателем, прежде чем уйти в историю. [ ссылка необходима ]
Холт и Бест объединились. Холт зарегистрировал товарный знак Caterpillar.Объединенная компания произвела версию трактора Best 60, которая позже стала Caterpillar 60. Новая корпорация получила название Caterpillar Inc. примерно в 1925 году и работает по сей день.
Текущие производители
Для некоторых задач, таких как подготовка почвы и уход за ней на очень крутых склонах, до сих пор используются гусеничные тракторы. Ярким примером являются виноградники, т.е. в Италии. [9] Сегодня на смену производителям-первопроходцам пришли в основном крупные тракторные компании, такие как John Deere, New Holland, Kubota, [10] Case, Caterpillar Inc., КЛААС. [11] Кроме того, есть несколько производителей гусеничных тракторов, специализирующихся на нишевых рынках. Примерами являются Otter Mfg. Co. и Struck Corporation. [12]
[9] Сегодня на смену производителям-первопроходцам пришли в основном крупные тракторные компании, такие как John Deere, New Holland, Kubota, [10] Case, Caterpillar Inc., КЛААС. [11] Кроме того, есть несколько производителей гусеничных тракторов, специализирующихся на нишевых рынках. Примерами являются Otter Mfg. Co. и Struck Corporation. [12]
Примеры
- Гусеничный тягач лег в основу первых конструкций танка.
- Гусеничные тележки, оснащенные отвалом, называются бульдозерами и используются для строительных и земляных работ. Гусеничные машины
- , оснащенные лопатой или ковшом, часто называют «Traxcavator», но они являются гусеничными лопатами или погрузчиками.Название Traxcavator было торговой маркой компании Trackson и было куплено Caterpillar Inc. в 1950 году. Гусеничная конструкция
- время от времени была популярна для использования на фермах.
- Космический шаттл доставляется на стартовую площадку на большом гусеничном транспортере. Scientific American, 18 декабря 1886 г., Vol. Otter & Struck производит нишевые гусеничные тракторы
Внешние ссылки
Rheinmetall Defense – гусеничные бронированные машины
В развернутых операциях сегодняшние вооруженные силы должны иметь возможность двигаться, стрелять и общаться в различных очень сложных условиях, что создает серьезные проблемы для современных систем военной техники. Целый ряд сценариев угроз, начиная от интенсивных обычных боев и заканчивая постконфликтными миротворческими миссиями и постоянным, неисчислимым риском асимметричного нападения, делает обязательным наличие адекватных мер защиты сил на местах.
Компания Rheinmetall является одним из ведущих европейских поставщиков гусеничных бронированных машин всех весовых категорий. Портфолио включает Leopard, MBT Advanced Technology Demonstrator, IFV Lynx, AEV 3 Kodiak, LRV Wiesel, и это лишь некоторые из них.
Леопард – Основной боевой танк
Leopard 2 компании Krauss-Maffei Wegmann (KMW), развернутый в большем количестве стран, чем любой другой, является лучшим в мире основным боевым танком. Потрясающие боевые характеристики, являющиеся результатом оптимального сочетания огневой мощи, защиты, мобильности и оперативной готовности, ставят Leopard 2 в отдельный класс.Важно отметить, что он вооружен великолепной 120-мм гладкоствольной пушкой Rheinmetall. Rheinmetall также производит широкий ассортимент современных боеприпасов для Leopard 2, а также поставляет для танка технологию управления огнем и системы C4I.
Потрясающие боевые характеристики, являющиеся результатом оптимального сочетания огневой мощи, защиты, мобильности и оперативной готовности, ставят Leopard 2 в отдельный класс.Важно отметить, что он вооружен великолепной 120-мм гладкоствольной пушкой Rheinmetall. Rheinmetall также производит широкий ассортимент современных боеприпасов для Leopard 2, а также поставляет для танка технологию управления огнем и системы C4I.
При нажатии на это видео и его воспроизведении будет установлено соединение с YouTube, что приведет к обработке данных YouTube (Google). Воспроизводя это видео, вы соглашаетесь на обработку данных и установку файлов cookie на вашем устройстве.› Дополнительную информацию можно найти здесь.
Это видео встроено в режим повышенной конфиденциальности YouTube, который блокирует настройку файлов cookie YouTube до тех пор, пока вы не воспроизведете видео.
Нажимая кнопку воспроизведения, вы даете YouTube согласие на установку файлов cookie на вашем устройстве, которые также могут использоваться для анализа поведения пользователей в целях исследования рынка и маркетинга. Поскольку YouTube предоставляется американо-американской компанией Google, нельзя исключать передачу ваших данных в США.
Поскольку YouTube предоставляется американо-американской компанией Google, нельзя исключать передачу ваших данных в США.
Нажимая кнопку воспроизведения, вы также прямо соглашаетесь в соответствии со ст. 49 абз. 1 предложение 1 лит. GDPR о том, что ваши данные, собранные с помощью этих файлов cookie YouTube, также могут обрабатываться YouTube/Google в США. Европейский суд (ЕС) признал США страной с уровнем защиты данных, не соответствующим стандартам ЕС. Мы не имеем никакого влияния на эту обработку данных.
Google Ireland Limited, Gordon House, Barrow Street, Dublin 4, Ирландия, отвечает за обработку этих данных YouTube (Германия).Дополнительную информацию об использовании файлов cookie YouTube можно найти в политике использования файлов cookie Google по адресу https://policies.google.com/technologies/types?hl=en
Демонстратор передовых технологий MBT
Демонстратор передовых технологий MBT можно развертывать для всех видов миссий и значительно превосходит по огневой мощи, защите и мобильности. Он предназначен для выполнения всех задач во всех мыслимых сценариях современной войны: конфликтах высокой интенсивности, миротворческих миссиях и контрповстанческих/террористических операциях, в любых климатических условиях и полностью боеспособен в ночное время.MBT Advanced Technology Demonstrator основан на обслуживаемом и отремонтированном стандартном подержанном ОБТ LEOPARD 2 A4, частично состоит из различных неизменных конфигураций с новыми дополнительными интегрированными обновлениями и улучшениями.
Он предназначен для выполнения всех задач во всех мыслимых сценариях современной войны: конфликтах высокой интенсивности, миротворческих миссиях и контрповстанческих/террористических операциях, в любых климатических условиях и полностью боеспособен в ночное время.MBT Advanced Technology Demonstrator основан на обслуживаемом и отремонтированном стандартном подержанном ОБТ LEOPARD 2 A4, частично состоит из различных неизменных конфигураций с новыми дополнительными интегрированными обновлениями и улучшениями.
При нажатии на это видео и его воспроизведении будет установлено соединение с YouTube, что приведет к обработке данных YouTube (Google). Воспроизводя это видео, вы соглашаетесь на обработку данных и установку файлов cookie на вашем устройстве. › Дополнительную информацию можно найти здесь.
Это видео встроено в режим повышенной конфиденциальности YouTube, который блокирует настройку файлов cookie YouTube до тех пор, пока вы не воспроизведете видео.
Нажимая кнопку воспроизведения, вы даете YouTube согласие на установку файлов cookie на вашем устройстве, которые также могут использоваться для анализа поведения пользователей в целях исследования рынка и маркетинга. Поскольку YouTube предоставляется американо-американской компанией Google, нельзя исключать передачу ваших данных в США.
Поскольку YouTube предоставляется американо-американской компанией Google, нельзя исключать передачу ваших данных в США.
Нажимая кнопку воспроизведения, вы также прямо соглашаетесь в соответствии со ст. 49 абз. 1 предложение 1 лит. GDPR о том, что ваши данные, собранные с помощью этих файлов cookie YouTube, также могут обрабатываться YouTube/Google в США. Европейский суд (ЕС) признал США страной с уровнем защиты данных, не соответствующим стандартам ЕС. Мы не имеем никакого влияния на эту обработку данных.
Google Ireland Limited, Gordon House, Barrow Street, Dublin 4, Ирландия, отвечает за обработку этих данных YouTube (Германия).Дополнительную информацию об использовании файлов cookie YouTube можно найти в политике использования файлов cookie Google по адресу https://policies.google.com/technologies/types?hl=en
Lynx — Боевая машина пехоты
Боевую машину пехоты Lynx характеризуют четыре основные характеристики: огневая мощь, защита сил, ситуационная осведомленность и мобильность. Проворная, мощная и высокозащищенная, эта современная гусеничная бронированная машина предназначена для доминирования на современном поле боя, подходящего для операций от принуждения к миру до высокоинтенсивных боев.
Проворная, мощная и высокозащищенная, эта современная гусеничная бронированная машина предназначена для доминирования на современном поле боя, подходящего для операций от принуждения к миру до высокоинтенсивных боев.
Узнайте больше о Lynx.
Пума – Боевая машина пехоты
Боевая машина пехоты Puma, созданная совместно компаниями Rheinmetall Defense и Krauss-Maffei Wegmann, является самой передовой системой в своем роде. Помимо превосходной модульной защиты, Puma обладает уникальными возможностями масштабируемой летальности и способностью принимать участие в сложных сетевых операциях. Эта инновационная БМП предлагает место для экипажа из девяти человек и может быть доставлена по воздуху в удаленные районы операций на военно-транспортном самолете A400M, что полностью отвечает требованиям максимальной тактической и стратегической мобильности.
Ссылка на сайт PSM Projekt System & Management GmbH
Puma – «Система панцергренадерская»
System Panzergrenadier значительно повысит боевую мощь и боевую эффективность VJTF 2023. Это формирование, оснащенное System Panzergrenadier, впервые в Германии объединит цифровую транспортную платформу — усовершенствованную версию VJTF боевой машины пехоты Puma. – и солдатская система, оснащенная цифровой радиосвязью.
Это формирование, оснащенное System Panzergrenadier, впервые в Германии объединит цифровую транспортную платформу — усовершенствованную версию VJTF боевой машины пехоты Puma. – и солдатская система, оснащенная цифровой радиосвязью.
Новости 19 марта 2021 г.: Немецкая армия объявляет «систему Panzergrenadier» пригодной для ведения боевых действий — веха для боевой машины пехоты Puma и Future Soldier — Expanded System
Marder – Боевая машина пехоты
Сочетая в себе превосходную тактическую мобильность и впечатляющую огневую мощь с возможностью быстрой и безопасной перевозки войск в зонах повышенной опасности, боевая машина пехоты Marder представляет собой выдающуюся современную систему вооружения.Испытанная на практике, проверенная в эксплуатации конструкция включает силовую установку в носовой части и центрально расположенную башню; боевое отделение находится сзади, с большой аппарелью для быстрого входа и выхода. Обслуживание простое. Кроме того, Marder специально разработан для простоты использования и максимальной надежности. Rheinmetall предлагает множество возможностей для повышения живучести, огневой мощи и разведывательных возможностей машины.
Rheinmetall предлагает множество возможностей для повышения живучести, огневой мощи и разведывательных возможностей машины.
Спецвыпуск: БМП Marder исполняется 50 лет
Wiesel 1 — семейство автомобилей
Благодаря своей выдающейся гибкости, мобильности и быстрой доступности на земле, семейство машин Wiesel 1 идеально подходит для поддержки аэромобильных сил.Эти исключительно универсальные транспортные средства могут перевозиться по воздуху в качестве подвесного груза или перевозиться внутри транспортного вертолета CH-53. Wiesel 1 выпускается в версиях TOW, MK 20 с автоматической пушкой и в разведывательной версии, что позволяет ему выполнять различные тактические задачи, включая разведку, C4I и операции по обеспечению безопасности.
Wiesel 2 — семейство автомобилей
Усовершенствованная версия семейства Wiesel 1, Wiesel 2 имеет более просторный салон и большую полезную нагрузку. Это современное семейство машин может выполнять широкий спектр задач, включая разведку, командование и управление, противовоздушную оборону, восстановление и эвакуацию раненых. Wiesel 2 доступен в легкой версии для противовоздушной обороны, медицинской эвакуации, саперной разведки и мобильного командного пункта.
Wiesel 2 доступен в легкой версии для противовоздушной обороны, медицинской эвакуации, саперной разведки и мобильного командного пункта.
При нажатии на это видео и его воспроизведении будет установлено соединение с YouTube, что приведет к обработке данных YouTube (Google). Воспроизводя это видео, вы соглашаетесь на обработку данных и установку файлов cookie на вашем устройстве. › Дополнительную информацию можно найти здесь.
Это видео встроено в режим повышенной конфиденциальности YouTube, который блокирует настройку файлов cookie YouTube до тех пор, пока вы не воспроизведете видео.
Нажимая кнопку воспроизведения, вы даете YouTube согласие на установку файлов cookie на вашем устройстве, которые также могут использоваться для анализа поведения пользователей в целях исследования рынка и маркетинга. Поскольку YouTube предоставляется американо-американской компанией Google, нельзя исключать передачу ваших данных в США.
Нажимая кнопку воспроизведения, вы также прямо соглашаетесь в соответствии со ст. 49 абз. 1 предложение 1 лит. GDPR о том, что ваши данные, собранные с помощью этих файлов cookie YouTube, также могут обрабатываться YouTube/Google в США. Европейский суд (ЕС) признал США страной с уровнем защиты данных, не соответствующим стандартам ЕС. Мы не имеем никакого влияния на эту обработку данных.
49 абз. 1 предложение 1 лит. GDPR о том, что ваши данные, собранные с помощью этих файлов cookie YouTube, также могут обрабатываться YouTube/Google в США. Европейский суд (ЕС) признал США страной с уровнем защиты данных, не соответствующим стандартам ЕС. Мы не имеем никакого влияния на эту обработку данных.
Google Ireland Limited, Gordon House, Barrow Street, Dublin 4, Ирландия, отвечает за обработку этих данных YouTube (Германия). Дополнительную информацию об использовании файлов cookie YouTube можно найти в политике использования файлов cookie Google по адресу https://policies.google.com/technologies/types?hl=en
Боевой переносной минометный комплекс: разведка, командование, огневая поддержка
Перед выполнением расширенного спектра задач сегодняшним вооруженным силам требуется аэромобильная система разведки, управления и огневой поддержки, которая бы быстро развертывалась, наносила удары, была надежной и гибкой — короче говоря, система, которая может выполнять сетевые огневые задачи на совместных и уровень коалиции. Эта система систем специально разработана для поддержки пехотных формирований, развернутых в операциях по принуждению к миру и реагированию на кризисы, предоставляя им органические возможности прямого и непрямого огня и противотанковые средства, а также интегрированные средства разведки и управления боем.
Эта система систем специально разработана для поддержки пехотных формирований, развернутых в операциях по принуждению к миру и реагированию на кризисы, предоставляя им органические возможности прямого и непрямого огня и противотанковые средства, а также интегрированные средства разведки и управления боем.
Узнайте больше о переносимой по воздуху усовершенствованной минометной системе, объединенной в цифровую сеть.
Bv206S – Легкобронированный авиаперевозочный вездеход
Bv206S — это высокомобильная, легкобронированная, переносная машина, состоящая из отдельных передней и задней секций.Они соединены и управляются гидравлической шарнирной трансмиссией и шарнирным соединением. Благодаря системе рулевого управления и широким резиновым гусеницам Bv206S обеспечивает превосходную маневренность даже на самой пересеченной местности. Немецкий бундесвер использует несколько версий Bv206S, сконфигурированных для использования в медицинских целях, мобильных хирургических машинах, бронетранспортерах и центрах тактических операций.
Büffel – Бронированная ремонтно-эвакуационная машина 3
Бронированные ремонтно-эвакуационные машины незаменимы для обеспечения движения современных механизированных армий.Бронированная ремонтно-эвакуационная машина Büffel 3 относится к семейству машин поддержки Leopard 2. Он играет жизненно важную роль в эвакуации тяжелой гусеничной техники, а также при выполнении различных ремонтных работ. Его хорошо сбалансированная баллистическая защита, система пожаротушения/подавления и система вентиляции NBC обеспечивают высокую степень живучести и боевой готовности.
Кадьяк – Бронированная инженерная машина 3
AEV3 «Кадьяк» — современный многофункциональный инженерно-боевой комплекс, отвечающий всему комплексу технических и тактических требований современных вооруженных сил.Построенный на шасси Leopard 2, включая защиту от противопехотных мин, Kodiak оснащен экскаватором с шарнирно-сочлененной стрелой и быстросменным устройством для крепления других орудий. Он также оснащен выдвижным бульдозерным отвалом, который при необходимости можно заменить устройством для разминирования. Благодаря этим компонентам Kodiak идеально подходит для возведения и преодоления препятствий на поле боя.
Он также оснащен выдвижным бульдозерным отвалом, который при необходимости можно заменить устройством для разминирования. Благодаря этим компонентам Kodiak идеально подходит для возведения и преодоления препятствий на поле боя.
Узнайте больше о AEV3 Kodiak.
Biber – Мостоукладчик
Танк-мостоукладчик Biber продолжает играть передовую роль на современном поле боя.Благодаря системе горизонтальной наводки «Бибер» может преодолевать естественные и искусственные препятствия всего за две минуты, при этом экипажу не нужно покидать безопасное боевое отделение. Получившийся мост шириной четыре метра и длиной 22 метра можно восстановить по обе стороны от препятствия. Эффективная ширина пролета составляет 20 метров, а это означает, что временный танковый мост, состоящий из двух частей, может преодолевать большинство препятствий.
Keiler – Танк для разминирования
Keiler — самая надежная в мире система тактического разминирования. Используя мощную систему минных цепов с роторным приводом, Keiler расчищает проходы через минные поля, обеспечивая мобильность дружественных войск. Вращающиеся элементы разминирования вспахивают землю в направлении движения машины, вызывая детонацию скрытых мин. В результате получается полоса, которая позволяет другим транспортным средствам безопасно пересекать минное поле.
Используя мощную систему минных цепов с роторным приводом, Keiler расчищает проходы через минные поля, обеспечивая мобильность дружественных войск. Вращающиеся элементы разминирования вспахивают землю в направлении движения машины, вызывая детонацию скрытых мин. В результате получается полоса, которая позволяет другим транспортным средствам безопасно пересекать минное поле.
PzH 2000 — Самоходная гаубица
Мощная самоходная гаубица PzH 2000 — самая совершенная в мире артиллерийская система, способная обеспечить решающую огневую поддержку в самых разных боевых сценариях.Эта непревзойденная система вооружения сочетает в себе большую дальность — она может стрелять стандартными снарядами НАТО на расстояние до 30 или 40 км и поражать цели на расстоянии до 56 км боеприпасами увеличенной дальности — с превосходной мобильностью на поле боя. Прочный и надежный, он доказал свою высокую эффективность в боевых действиях с немецкой и голландской армиями и т. д. В совместном предприятии с генеральным подрядчиком Krauss-Maffei Wegmann (KMW) Rheinmetall отвечает за около 50% PzH 2000.
границ | Осведомленность о местности с использованием гусеничной машины с бортовым поворотом и пассивной независимой подвеской
1.Введение
В течение последнего десятилетия было разработано несколько роботизированных решений для поддержки людей в сельскохозяйственной и промышленной деятельности, т. е. при опрыскивании, добыче полезных ископаемых, сборе урожая, хорошей транспортировке и мониторинге растений в тяжелых условиях. Более того, использование большого набора датчиков, таких как RGB-камеры, лазеры, GPS и инерциальные датчики, позволяет роботам адаптировать свою систему к окружающей среде, обрабатывая входные данные в сравнении с большим набором данных (Narvaez et al., 2017).В любом случае, в то время как большинство предыдущих исследований мобильных роботов для бездорожья были сосредоточены на обнаружении препятствий (Schaefer et al., 2005), планировании пути (Elfes et al., 1999) и оценке положения (Henson et al., 2008), не так много внимания уделялось взаимодействию робота с землей и тому, как это взаимодействие влияет на характеристики машины при обычных операциях. Безусловно, в большинстве суровых условий эксплуатации на открытом воздухе классификация и характеристика местности являются ключом к автономности и безопасности робота: правильная оценка характеристик местности позволяет транспортному средству оптимизировать свою скорость и крутящий момент и, в частности, избежать опасных ситуаций. условиях, которые могут повредить его двигательную систему или поставить под угрозу само транспортное средство.В качестве примечательного примера можно привести определение типа местности, которое имеет решающее значение для безопасности марсоходов для исследования планет, таких как марсоходы НАСА/Лаборатории реактивного движения (Rothrock et al., 2016). Подходы в литературе, используемой для характеристики местности, обычно требуют вне линии обработки и конкретные датчики и устройства, которые могут быть дорогими и сложными для обработки грубых сред (Ojeda et al., 2006). Примеры экстероцептивного восприятия можно найти у Milella et al. (2015), где для классификации сельскохозяйственной местности была представлена комбинация радиолокационного и монокулярного зрения в рамках самообучающейся статистической структуры.
Безусловно, в большинстве суровых условий эксплуатации на открытом воздухе классификация и характеристика местности являются ключом к автономности и безопасности робота: правильная оценка характеристик местности позволяет транспортному средству оптимизировать свою скорость и крутящий момент и, в частности, избежать опасных ситуаций. условиях, которые могут повредить его двигательную систему или поставить под угрозу само транспортное средство.В качестве примечательного примера можно привести определение типа местности, которое имеет решающее значение для безопасности марсоходов для исследования планет, таких как марсоходы НАСА/Лаборатории реактивного движения (Rothrock et al., 2016). Подходы в литературе, используемой для характеристики местности, обычно требуют вне линии обработки и конкретные датчики и устройства, которые могут быть дорогими и сложными для обработки грубых сред (Ojeda et al., 2006). Примеры экстероцептивного восприятия можно найти у Milella et al. (2015), где для классификации сельскохозяйственной местности была представлена комбинация радиолокационного и монокулярного зрения в рамках самообучающейся статистической структуры. Локальный дескриптор, полученный в результате реконструкции трехмерной среды, был предложен Bellone et al. (2018) для оценки неровностей местности. Лазерные дальномеры и датчики спектрального изображения также были предложены для наземной идентификации, соответственно, в Broten et al. (2012) и Jin et al. (2015).
Локальный дескриптор, полученный в результате реконструкции трехмерной среды, был предложен Bellone et al. (2018) для оценки неровностей местности. Лазерные дальномеры и датчики спектрального изображения также были предложены для наземной идентификации, соответственно, в Broten et al. (2012) и Jin et al. (2015).
Другие исследователи исследовали методы классификации местности с использованием проприоцептивного восприятия. Например, методы классификации рельефа на основе ускорения были введены для планетарных исследовательских вездеходов (Brooks and Iagnemma, 2005) и роботов для пересеченной местности (DuPont et al., 2008). Однако транспортные средства, принятые для испытаний, основаны на колесах и, как правило, не оснащены системами подвески (Masha et al., 2017; Reina et al., 2017a). Этот последний аспект можно рассматривать как ограничивающий фактор, поскольку неровности, с которыми можно столкнуться на такой местности, как вспаханная и каменистая почва или гравий, могут вызвать непреднамеренное механическое напряжение на раме робота и датчиках.
В этом исследовании предлагается метод определения характеристик местности с использованием гусеничного транспортного средства с бортовым поворотом и пассивной подвеской путем определения набора параметров, основанных на физическом понимании механизмов, лежащих в основе взаимодействия транспортного средства с землей, а именно токов приводного двигателя, эквивалентный след скольжения и спектральная плотность мощности, связанные с электрическими токами и вертикальными ускорениями тела.Первые два параметра строго связаны с мощностью, необходимой транспортному средству для движения по конкретной местности, т. Е. Песок создает большее сопротивление движению, чем асфальт; эквивалентный след проскальзывания можно использовать для измерения величины проскальзывания, связанного с транспортным средством с бортовым поворотом во время маневра рулевого управления. Расширенный фильтр Калмана (EKF) используется для поддержки оценки на основе модели, чтобы обеспечить онлайн-оценку пути проскальзывания; фильтр использует в качестве входных данных разницу между скоростями левой и правой гусениц, полученную с помощью поворотных энкодеров, установленных на звездочках обеих гусениц, и скорость движения транспортного средства, измеренную инерционным блоком. Спектральная плотность мощности (PSD) вертикального ускорения описывает мощность сигнала как функцию частоты на единицу частоты (Li and Sandu, 2013). В нашем исследовании вертикальное движение робота контролируется амортизатором, установленным на каждом рычаге подвески.
Спектральная плотность мощности (PSD) вертикального ускорения описывает мощность сигнала как функцию частоты на единицу частоты (Li and Sandu, 2013). В нашем исследовании вертикальное движение робота контролируется амортизатором, установленным на каждом рычаге подвески.
В соответствии с структурой документа в разделе 2 показана модель автомобиля, использованная в данном исследовании. В разделе 3 исследуется, как транспортное средство взаимодействует с опорной поверхностью во время прямолинейного движения и поворота, и дается описание метода PSD.В разделе 4 представлены соображения и экспериментальные результаты, полученные на различных поверхностях с использованием вездехода на гусеничном ходу для подтверждения предложенного подхода. Раздел 5 завершает статью.
2. Материалы и методы
2.1. Аппаратная архитектура
Транспортное средство, используемое для этой исследовательской работы, представляет собой гусеничный робот с бортовым поворотом под названием «maXXII», который разрабатывается в Университете Саленто. Он имеет пассивную подвеску, как показано на рисунке 1. Вес автомобиля составляет W = 40 кг, а его номинальная ширина колеи равна 0.95 м. Каждая гусеница (A) имеет ширину около 0,18 м и высоту 0,16 м и состоит из сплошной полосы гусениц, изготовленных из синтетического каучука для использования в условиях бездорожья и армированных стальной проволокой для обеспечения хорошего сцепления с дорогой. практически на всех поверхностях. Каждая ходовая часть основана на параллелограммной конструкции с более продвинутым верхним передним колесом, помогающим автомобилю преодолевать препятствия и подниматься по лестнице. Каждая звездочка гусеницы (B) приводится в движение двигателем постоянного тока 12 В с коробкой передач с максимальным выходным крутящим моментом 40 Нм и максимальной угловой скоростью 70 об/мин при общей выходной мощности около 400 Вт.В комплект датчиков входят два оптических энкодера, установленных на каждом валу редуктора, два датчика тока, RTK GPS и инерциальный измерительный блок с 3-осевым гироскопом, акселерометром и магнитометром для ориентации в системе отсчета NED (север, восток, низ).
Он имеет пассивную подвеску, как показано на рисунке 1. Вес автомобиля составляет W = 40 кг, а его номинальная ширина колеи равна 0.95 м. Каждая гусеница (A) имеет ширину около 0,18 м и высоту 0,16 м и состоит из сплошной полосы гусениц, изготовленных из синтетического каучука для использования в условиях бездорожья и армированных стальной проволокой для обеспечения хорошего сцепления с дорогой. практически на всех поверхностях. Каждая ходовая часть основана на параллелограммной конструкции с более продвинутым верхним передним колесом, помогающим автомобилю преодолевать препятствия и подниматься по лестнице. Каждая звездочка гусеницы (B) приводится в движение двигателем постоянного тока 12 В с коробкой передач с максимальным выходным крутящим моментом 40 Нм и максимальной угловой скоростью 70 об/мин при общей выходной мощности около 400 Вт.В комплект датчиков входят два оптических энкодера, установленных на каждом валу редуктора, два датчика тока, RTK GPS и инерциальный измерительный блок с 3-осевым гироскопом, акселерометром и магнитометром для ориентации в системе отсчета NED (север, восток, низ).
Рисунок 1 . Первая версия автомобиля «maXXII», использованная для этой исследовательской работы.
2.2. Система подвески
Система пассивной подвески транспортного средства выполняет несколько задач, таких как поддержание контакта между резиновыми гусеницами и поверхностью земли, обеспечение устойчивости транспортного средства и защита рамы транспортного средства от всех ударов, вызванных неровностями местности.Он работает вместе с резиновой подушкой, промежуточными колесами гусеницы, рамой и рычагами подвески, чтобы обеспечить устойчивость и каким-то образом физически отделить кузов автомобиля от резиновой подушки автомобиля. Каждая гусеница состоит из пяти промежуточных колес (A) и четырех однорычажных подвесок (B), шарнирные соединения которых ( O 1 , O 2 , O 3 ) установлены непосредственно на рама робота с четырьмя независимыми амортизаторами, которые позволяют одному колесу двигаться вверх и вниз с минимальным воздействием на другое колесо, как показано на рисунке 2. Система подвески была разработана для обеспечения достаточного вертикального движения колес, чтобы автомобиль мог преодолевать неровности местности. Когда неработающее колесо касается неровности, механизм подвески может обеспечить достаточное вертикальное движение, чтобы колесо не продолжало двигаться вверх, захватывая раму с той же высокой скоростью, что приводит к большому вертикальному ускорению вдоль оси z; этот аспект очень важен, потому что он уменьшает шум и вибрации во время сбора данных датчиком.На рис. 3 представлен случай, когда неработающее колесо движется в вертикальном направлении и получает максимальные значения на отскоке (вверх) при H = 0,10 м и на отбой (вниз) при H = − 0,05 м. Типичная конфигурация подвески представлена на рис. 4, где можно увидеть, что происходит, когда транспортное средство пересекает небольшую неровность S ; в этом случае, как только транспортное средство сталкивается с неровностью, неработающее колесо A вынуждено двигаться вверх, а за ним следует второе неработающее колесо B .
Система подвески была разработана для обеспечения достаточного вертикального движения колес, чтобы автомобиль мог преодолевать неровности местности. Когда неработающее колесо касается неровности, механизм подвески может обеспечить достаточное вертикальное движение, чтобы колесо не продолжало двигаться вверх, захватывая раму с той же высокой скоростью, что приводит к большому вертикальному ускорению вдоль оси z; этот аспект очень важен, потому что он уменьшает шум и вибрации во время сбора данных датчиком.На рис. 3 представлен случай, когда неработающее колесо движется в вертикальном направлении и получает максимальные значения на отскоке (вверх) при H = 0,10 м и на отбой (вниз) при H = − 0,05 м. Типичная конфигурация подвески представлена на рис. 4, где можно увидеть, что происходит, когда транспортное средство пересекает небольшую неровность S ; в этом случае, как только транспортное средство сталкивается с неровностью, неработающее колесо A вынуждено двигаться вверх, а за ним следует второе неработающее колесо B . Чтобы удерживать гусеничный ремень натянутым, колесо T вытягивается вперед под действием пружинного натяжителя, а колесо C опускается, чтобы удерживать ремень в своем положении. Другая типичная конфигурация подвески представлена также на фиг. 5 с транспортным средством при прохождении небольшого ухаба S ; в этой ситуации холостой ход колеса А очень близок к своему нормальному положению, так как он движется в горизонтальной плоскости, а холостые колеса В и С диаметрально противоположны, потому что они пытаются натянуть гусеничное полотно под действием своего удара поглотители.Колесо натяжителя кажется смещенным наружу, чем в предыдущей конфигурации, поскольку холостой ролик D перемещается вверх и уменьшает натяжение гусеницы впереди, поскольку транспортное средство движется вперед.
Чтобы удерживать гусеничный ремень натянутым, колесо T вытягивается вперед под действием пружинного натяжителя, а колесо C опускается, чтобы удерживать ремень в своем положении. Другая типичная конфигурация подвески представлена также на фиг. 5 с транспортным средством при прохождении небольшого ухаба S ; в этой ситуации холостой ход колеса А очень близок к своему нормальному положению, так как он движется в горизонтальной плоскости, а холостые колеса В и С диаметрально противоположны, потому что они пытаются натянуть гусеничное полотно под действием своего удара поглотители.Колесо натяжителя кажется смещенным наружу, чем в предыдущей конфигурации, поскольку холостой ролик D перемещается вверх и уменьшает натяжение гусеницы впереди, поскольку транспортное средство движется вперед.
Рисунок 2 . Пассивная система подвески, используемая для каждой гусеницы, состоит из четырех рычажных механизмов и четырех амортизаторов.
Рисунок 3 . Однорычажная подвеска с амортизаторами.
Рисунок 4 . Пример конфигурации подвески.
Рисунок 5 . Еще один пример конфигурации подвески.
При рассмотрении упрощенной системы подвески, показанной на рис. 6, где наличием подрессоренной массы пренебрегают, а жесткость амортизатора равна k = 37,27 Н/мм, масса рычажного механизма составляет M 1 = 0,9 кг и длиной L = 0,1 м, неработающее колесо имеет радиус r = 0,04 м, массу м = 0,5 кг и жесткость k p , можно написать уравнения для описания поведения подсистемы:
Iθ¨=-gLcosθ(M12+m)-k(L0cosα)2sinθ-L2kpsinθ (1) I=M13L2+m2r2+mL2 (2)Рисунок 6 .Простая подсистема, состоящая из одноплечевой навески с амортизатором.
Где I — выражение инерции узла, состоящего из рычажного механизма подвески и промежуточного колеса, θ — угол, связанный с угловым смещением рычажного механизма, θ¨ его вторая производная, а O — точка поворота вращательного движение связки. Учитывая малые колебания, можно переписать выражение в (1) как:
Учитывая малые колебания, можно переписать выражение в (1) как:
Последнее уравнение в (4) используется для выражения собственной частоты, связанной с подвесной системой.
2.3. Архитектура программного обеспечения
ROS (Robot Operating System) ROS (2007 г.) используется как для управления транспортным средством, так и для считывания данных со всех датчиков, поскольку позволяет пользователю легко использовать большой набор библиотек, фильтров и инструментов для сбора и обработки поступающих данных. от датчиков; кроме того, пользователь может посылать транспортному средству команды Twist и заставлять его двигаться в зависимости от линейных составляющих для скоростей (x, y, z) и от угловых составляющих угловой скорости для осей (x, y, z).Система работает на процессоре AMD x86 на основе архитектуры SOC и объединяет мощный графический процессор для графической обработки и карту Wi-Fi для удаленного подключения; операционной системой, используемой для экспериментальных тестов, была Ubuntu с сервером ROS для обмена сообщениями с удаленной машиной, используемой в качестве клиента. На рисунке 7 представлена функциональная блок-схема, показывающая аппаратный уровень, используемый для этой исследовательской работы, который включает в себя инерциальный датчик, Mti-300 от XSens, лазерный датчик, LMS-111 от SICK, два оптических энкодера, два датчика Холла, два датчика напряжения. датчики и RTK GPS), модуль Wi-Fi, необходимый для удаленной связи с транспортным средством, приемник Bluetooth, который позволяет управлять транспортным средством вручную, и двухканальный контроллер двигателя.Конкретный узел ROS был разработан на C++, чтобы позволить транспортному средству взаимодействовать с датчиками, в то время как другой был разработан для отправки инструкций по передвижению на контроллер двигателя и для отправки полученных значений от датчиков по сети Wi-Fi.
На рисунке 7 представлена функциональная блок-схема, показывающая аппаратный уровень, используемый для этой исследовательской работы, который включает в себя инерциальный датчик, Mti-300 от XSens, лазерный датчик, LMS-111 от SICK, два оптических энкодера, два датчика Холла, два датчика напряжения. датчики и RTK GPS), модуль Wi-Fi, необходимый для удаленной связи с транспортным средством, приемник Bluetooth, который позволяет управлять транспортным средством вручную, и двухканальный контроллер двигателя.Конкретный узел ROS был разработан на C++, чтобы позволить транспортному средству взаимодействовать с датчиками, в то время как другой был разработан для отправки инструкций по передвижению на контроллер двигателя и для отправки полученных значений от датчиков по сети Wi-Fi.
Рисунок 7 . Функциональная блок-схема подержанного автомобиля.
3. Взаимодействие автомобиля с местностью
3.1. Кинематическая модель автомобиля
Системы вождения, основанные на методе рулевого управления с бортовым поворотом, обычно используются на гусеничных транспортных средствах, таких как гусеничные машины и военные танки, для бездорожья. Для этого типа транспортных средств левая и правая гусеницы могут двигаться с разной скоростью как в прямом, так и в обратном режиме в зависимости от угловой скорости и направления звездочки. Из-за сложных гусениц и взаимодействий с местностью очень сложно точно описать правильную кинематическую модель для мобильных транспортных средств с бортовым поворотом. В этом случае правильное исследование проскальзывания колес играет ключевую роль в кинематическом и динамическом моделировании мобильных транспортных средств с бортовым поворотом; это связано с тем, что информация о скольжении может описывать соотношение между угловой скоростью колеса и линейным движением платформы транспортного средства.Приложения локализации транспортных средств с бортовым поворотом, такие как счисление пути, строго полагаются на определение информации о проскальзывании, даже если эта информация может также использоваться для извлечения и исследования условий местности. На рис. 8 показаны принципы кинематики транспортного средства с бортовым поворотом при повороте по часовой стрелке с учетом фиксированной системы координат правостороннего транспортного средства, начало которой находится в центре масс транспортного средства.
Для этого типа транспортных средств левая и правая гусеницы могут двигаться с разной скоростью как в прямом, так и в обратном режиме в зависимости от угловой скорости и направления звездочки. Из-за сложных гусениц и взаимодействий с местностью очень сложно точно описать правильную кинематическую модель для мобильных транспортных средств с бортовым поворотом. В этом случае правильное исследование проскальзывания колес играет ключевую роль в кинематическом и динамическом моделировании мобильных транспортных средств с бортовым поворотом; это связано с тем, что информация о скольжении может описывать соотношение между угловой скоростью колеса и линейным движением платформы транспортного средства.Приложения локализации транспортных средств с бортовым поворотом, такие как счисление пути, строго полагаются на определение информации о проскальзывании, даже если эта информация может также использоваться для извлечения и исследования условий местности. На рис. 8 показаны принципы кинематики транспортного средства с бортовым поворотом при повороте по часовой стрелке с учетом фиксированной системы координат правостороннего транспортного средства, начало которой находится в центре масс транспортного средства.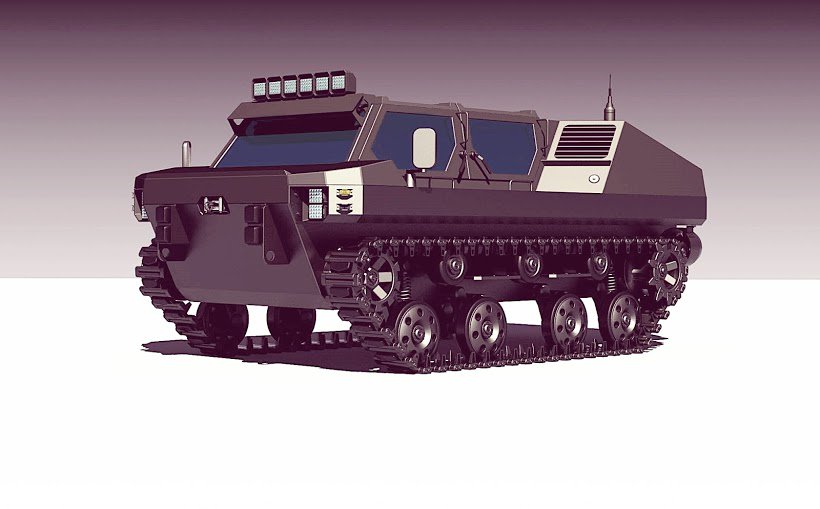 Используя аналогичные свойства треугольника, уравнение для измерения радиуса поворота может быть получено путем рассмотрения пропорции между каждой стороной двух треугольников AFC и ADE , как в уравнениях (5) и (6).
Используя аналогичные свойства треугольника, уравнение для измерения радиуса поворота может быть получено путем рассмотрения пропорции между каждой стороной двух треугольников AFC и ADE , как в уравнениях (5) и (6).
Рисунок 8 . Кинематика гусеничного транспортного средства с бортовым поворотом при маневрировании по часовой стрелке, где B — ширина корпуса транспортного средства, V 0 — скорость внешней гусеницы, а Vi — скорость внутренней гусеницы.
Следует отметить, что радиус поворота, рассчитанный по уравнению (5), учитывается в предположении, что во время поворота между неработающими колесами и резиновой гусеницей, а также между резиновыми накладками и землей не возникает эффекта проскальзывания.Однако в реальном мире эффекты проскальзывания и проскальзывания между неработающими колесами, резиновыми гусеницами и поверхностью земли можно наблюдать для всех транспортных средств с бортовым поворотом, поскольку проскальзывание необходимо, когда необходимо изменить направление движения транспортного средства. Как следствие, даже при малой угловой скорости руления традиционного кинематического подхода недостаточно для правильного описания положения автомобиля в окружающей среде. Разница между скоростью движения автомобиля вперед и угловой скоростью звездочки может быть получена в результате эффекта продольного скольжения i , который хорошо описывается формулой:
Как следствие, даже при малой угловой скорости руления традиционного кинематического подхода недостаточно для правильного описания положения автомобиля в окружающей среде. Разница между скоростью движения автомобиля вперед и угловой скоростью звездочки может быть получена в результате эффекта продольного скольжения i , который хорошо описывается формулой:
, в то время как новая оценка скорости рыскания будет такой, как показано в следующем уравнении (9):
ωz′=vi(vo(1-i0)vi-(1-ii))B (9)3.2. Расширенный фильтр Калмана для эквивалентной дорожки
Несмотря на то, что некоторые исследования полагаются на оценку заноса для локализации транспортного средства (Martinez et al., 2005) и планирования пути (Pentzer et al., 2014), точная связь между эффектом продольного заноса и поведением транспортного средства не была установлена. приобрел еще. Безусловно, практически все эффекты буксования и буксования можно считать результатом взаимодействия как левой, так и правой резиновых гусениц с поверхностью земли; стоит даже отметить, что эффекты проскальзывания вносят ошибку в показания энкодера, которую нельзя использовать для расчета положения автомобиля. В данной работе понятие эквивалентной колеи, ранее введенное авторами (Reina and Galati, 2016), используется в качестве параметра для описания условий местности и ее классификации в зависимости от величины пробуксовки, вносимой в систему транспортного средства. Выразив угловую скорость транспортного средства ω z как:
В данной работе понятие эквивалентной колеи, ранее введенное авторами (Reina and Galati, 2016), используется в качестве параметра для описания условий местности и ее классификации в зависимости от величины пробуксовки, вносимой в систему транспортного средства. Выразив угловую скорость транспортного средства ω z как:
, где B s — предполагаемая эквивалентная дорожка, можно реализовать наблюдатель состояния с использованием EKF, расширив уравнение (10) до модели пространства состояний с дискретным временем (Reina et al., 2017b), где значения параметров меняются как при случайном блуждании:
xk+1=xk+ωk;zk+1=Hk+1xk+1+vk+1; (11) где x K = 1/ = 1/ B = 1/ B = 1/ B = 1/ B = 1/ B S – это переменная состояния по времени K , а Z K +1 – это наблюдение, то есть Ω, и H k +1 коэффициент измерения, т. k+1 — обновленный вектор состояния, а P k +1 — обновленная оценка ковариации ошибок.Оценка проскальзывания рассчитывается только при поворотах, так как при прямолинейном движении фильтр отключается из-за отсутствия возбуждения. Следует отметить, что измерение пути проскальзывания остается ограниченным. Когда транспортное средство выполняет прямолинейное движение, и числитель, и знаменатель в уравнении Bs=ΔVωz-1 являются бесконечно малыми величинами одного порядка, что приводит к конечным значениям B s .
k+1 — обновленный вектор состояния, а P k +1 — обновленная оценка ковариации ошибок.Оценка проскальзывания рассчитывается только при поворотах, так как при прямолинейном движении фильтр отключается из-за отсутствия возбуждения. Следует отметить, что измерение пути проскальзывания остается ограниченным. Когда транспортное средство выполняет прямолинейное движение, и числитель, и знаменатель в уравнении Bs=ΔVωz-1 являются бесконечно малыми величинами одного порядка, что приводит к конечным значениям B s .
3.3. Анализ токов двигателя
В отличие от колесных машин, где участок протектора шины, соприкасающийся с поверхностью земли, очень мал, а давление на грунт может достигать очень высоких значений, для гусеничных машин характерен больший отпечаток на поверхности почвы и более низкий грунт. давление.Кроме того, значение максимального тягового усилия F max , которое может быть создано гусеничным транспортным средством, создается напряжением сдвига местности, τ max , и площадью контакта A, как показано на рис. следующее уравнение:
следующее уравнение:
, где A = 0,220 м 2 — площадь контакта для обоих путей, а W = 392 N — нормальная нагрузка, а c и ϕ строго связаны с типом местности.Поскольку в электромобилях тяговое усилие, тяга и крутящий момент можно считать примерно пропорциональными току двигателя постоянного тока:
, где T r — постоянный крутящий момент двигателя, а τ = 60 — передаточное число редуктора. Таким образом, измеряя токи левого и правого двигателей при прямолинейном движении с постоянной скоростью, можно получить косвенную оценку сопротивления движению для конкретных условий местности с учетом геометрии пути и вертикальной нагрузки.Стоит отметить, что из-за особой конструкции трассы амплитуда пиков тока и их период меняются в зависимости от физических характеристик каждой местности. Неровности местности по-разному передают мощность на гусеницы, требуя большего или меньшего крутящего момента двигателя. На асфальте значения тока двигателя имеют регулярные пики и периоды, поскольку поверхность почти плоская и не имеет шероховатости; в этом случае амплитуда электрического тока ограничена. На гравийных или каменистых грунтах значения течений имеют несколько высоких пиков из-за наличия обломков и неровностей, в то время как песчаная местность характеризуется низкими пиками, но самой высокой амплитудой течений.Это происходит потому, что песок обладает большей деформируемостью, чем асфальт, и обеспечивает большую площадь контакта с гусеницами.
На асфальте значения тока двигателя имеют регулярные пики и периоды, поскольку поверхность почти плоская и не имеет шероховатости; в этом случае амплитуда электрического тока ограничена. На гравийных или каменистых грунтах значения течений имеют несколько высоких пиков из-за наличия обломков и неровностей, в то время как песчаная местность характеризуется низкими пиками, но самой высокой амплитудой течений.Это происходит потому, что песок обладает большей деформируемостью, чем асфальт, и обеспечивает большую площадь контакта с гусеницами.
3.4. Вертикальные ускорения
Виброотклик гусеничной машины на местности сильно отличается от реакции машины на колесах. Итак, для определения точной динамической модели гусеничной машины очень важно изучить виброотклик машины. В линейных системах существует прямая линейная зависимость между входными и выходными сигналами.Как правило, система транспортного средства, которая определяется своей передаточной функцией, принимает во внимание входные данные, представляющие неровности местности, и генерирует выходные данные, представляющие собой вибрацию транспортного средства. В этом случае функция частотной характеристики может быть определена как отношение выхода к входу в установившихся условиях. Если можно рассмотреть упрощенную модель с одной степенью свободы для транспортного средства, и как входные, так и выходные значения могут быть выражены в терминах перемещений и вибрации подрессоренной массы, поскольку выход рассчитывается в терминах ускорений, то модуль передаточной функции H ( f ) выражается следующим образом:
В этом случае функция частотной характеристики может быть определена как отношение выхода к входу в установившихся условиях. Если можно рассмотреть упрощенную модель с одной степенью свободы для транспортного средства, и как входные, так и выходные значения могут быть выражены в терминах перемещений и вибрации подрессоренной массы, поскольку выход рассчитывается в терминах ускорений, то модуль передаточной функции H ( f ) выражается следующим образом:
, где f — частота возбуждения, а f n — собственная частота системы.Коэффициент демпфирования не входит в уравнение (19), так как амортизатор, используемый транспортным средством, работает только с пружиной без демпферов. Когда известна передаточная функция конкретной системы, можно выразить связь между спектральной плотностью мощности на входе S g ( f ) и спектральной плотностью мощности на выходе S v ( f ) всей системы следующим образом:
Sv(f)=|H(f)2|Sg(f) (20) При рассмотрении линейных систем это соотношение показывает, как спектральная плотность мощности на выходе связана со спектральной плотностью мощности на входе через квадрат модуля передаточной функции. Спектральная плотность мощности определяет, как мощность сигнала распределяется по частоте, и она строго коррелирует с взаимодействием между профилем местности и гусеничным полотном, а также между ремнем и звездочкой гусеницы. В отличие от колесных транспортных средств, которые обычно имеют только один пик в своей частотной характеристике, транспортное средство, использованное для этого исследования, показало в общей сложности четыре отчетливых и отдельных пика и четыре нечетные гармоники. Изучение этого важного аспекта позволяет найти правильный отпечаток для каждого профиля местности.
Спектральная плотность мощности определяет, как мощность сигнала распределяется по частоте, и она строго коррелирует с взаимодействием между профилем местности и гусеничным полотном, а также между ремнем и звездочкой гусеницы. В отличие от колесных транспортных средств, которые обычно имеют только один пик в своей частотной характеристике, транспортное средство, использованное для этого исследования, показало в общей сложности четыре отчетливых и отдельных пика и четыре нечетные гармоники. Изучение этого важного аспекта позволяет найти правильный отпечаток для каждого профиля местности.
Функция спектральной плотности мощности использовалась также для изучения поведения тока двигателя в установившихся условиях, когда транспортное средство движется прямо в течение не менее 30 с и с максимальной скоростью на различных участках. Это дает общее представление о спектральном распределении энергии и текущей сигнатуре для каждого профиля местности.
4. Экспериментальные результаты
4.
 1. Полевые эксперименты
1. Полевые эксперименты Для проверки метода и получения данных было проведено несколько испытаний на различных поверхностях местности: песке, гравии, грязи и асфальте.На рис. 9 показан вид с воздуха на испытательное поле, полученное с Google Earth (40° 7′ 56,0856″ с.ш., 18° 30′ 2,2356″ в.д.), используемое для экспериментальных кампаний (слева), расположенное в Отранто, Италия, и вид автомобиля, движущегося по небольшим естественным неровностям (справа). Во всех экспериментах машина «maXXII» была вынуждена выполнять два основных примитива движения и, в частности, прямолинейное движение с постоянной скоростью 0,75 м/с с последующим рулевым маневром с постоянной скоростью поворота 45 град/с. . Во время каждого испытания набор данных регистрировался с помощью утилиты rosbag, предоставленной ROS, включая токи двигателя, угловые скорости гусеничных звездочек и ускорения вдоль вертикальной оси на частоте F с = 120 Гц.Для каждой местности был определен «отпечаток пальца» путем объединения конкретных значений электрических токов, эквивалентного пути и спектральной плотности мощности как электрических токов, так и вертикальных ускорений; после этого был использован инструмент обучения классификации для обучения модели классифицированным данным.![]()
Рис. 9. (A) Вид с воздуха на испытательное поле в Бокситовом карьере, (B) транспортное средство, движущееся по естественным неровностям.
4.2. Оценка местности
Зарегистрированные значения для эквивалентной колеи показаны на рис. 10, где можно проверить поведение транспортного средства при поворотах по песку, гравию, грязи и асфальту.Все основные значения приведены в Таблице 1, а максимальная эквивалентная длина пути 1,329 м была получена во время испытаний по грязи, где мокрая поверхность создает самый высокий эффект проскальзывания, в то время как асфальт показал наименьшее среднее значение всего 1,159 м.
Рисунок 10 . Эквивалентные значения гусениц для песка, гравия, грязи и асфальта.
Таблица 1 . Эквивалентные значения трека для разных ландшафтов.
Кроме того, токи двигателя по-разному вели себя на каждой местности, демонстрируя широкие и узкие пики тока на асфальте и гравии и почти плоскую тенденцию на грязи и песке. В этих двух последних случаях амплитуда тока была выше, чем на асфальте и гравии, поскольку песчаная и грязная местность более гибкая и обеспечивает большую площадь контакта для гусениц, что требует более высокого тягового усилия, как показано на Рисунке 11, где синий цвет линия относится к току левого двигателя, а красная линия относится к току правого двигателя; смещение между обоими токами обусловлено различными собственными характеристиками двигателя и рассеиваемой мощностью. Средние значения тока приведены в таблице 2 и относятся к прямым путям.
В этих двух последних случаях амплитуда тока была выше, чем на асфальте и гравии, поскольку песчаная и грязная местность более гибкая и обеспечивает большую площадь контакта для гусениц, что требует более высокого тягового усилия, как показано на Рисунке 11, где синий цвет линия относится к току левого двигателя, а красная линия относится к току правого двигателя; смещение между обоими токами обусловлено различными собственными характеристиками двигателя и рассеиваемой мощностью. Средние значения тока приведены в таблице 2 и относятся к прямым путям.
Рисунок 11 . Значения тока двигателя для песка, гравия, грязи и асфальта.
Таблица 2 . Эквивалентные значения трека для разных ландшафтов.
Спектральная плотность мощности была рассчитана для выборки с временной длиной t = 10 с с использованием ускорений вдоль оси Z транспортного средства, зарегистрированных с инерциального датчика, и показывает, как треки взаимодействуют с профилем местности, как это можно увидеть на рисунке 12.
Рисунок 12 .Значения спектральной плотности мощности для песка, гравия, грязи и асфальта.
В частности, стоит отметить, что более высокое значение спектральной плотности мощности было зарегистрировано на частоте около 10 Гц для всех испытаний, демонстрируя своего рода собственную периодичность транспортного средства, как показано в Таблице 3. Конкретная конструкция пути генерирует в общей сложности четыре гармоники. для каждой местности: первая центрирована на частоте 10 Гц для всех местности, кроме грязи. Третья гармоника расположена на частоте около 30 Гц, пятая – на 50 Гц, а седьмая гармоника – на 70 Гц.Мягкая грязь снижает подвижность всей гусеницы, и это вызывает очень специфическую более медленную частотную характеристику, в то время как асфальт обеспечивает гораздо более отзывчивый и реактивный профиль местности.
Таблица 3 . Типичные значения PSD вертикального ускорения тела.
Предыдущий метод, основанный на функции спектральной плотности мощности, был применен также к токам двигателя во время прямолинейного движения, чтобы добавить и улучшить информацию о характеристиках профиля для каждой местности.
Для этой конкретной ситуации спектральная плотность мощности была рассчитана с использованием метода Уэлча, который опирается на концепцию использования оценок спектра периодограммы в результате преобразования сигнала из временной области в частотную область для уменьшения шума в оценочной области. спектры мощности в обмен на снижение разрешения по частоте. Метод применяется как к левому, так и к правому двигателю; среднее значение их амплитуд PSD рассматривалось как дополнительный параметр для характеристики местности.В таблице 4 приведены некоторые типичные значения амплитуд PSD, применяемых к токам двигателя на различных участках.
Таблица 4 . Спектральная плотность мощности.
4.3. Алгоритм классификации
После 100 кампаний испытаний в реальных условиях средние значения тока двигателей и спектральной плотности мощности как для ускорений по оси Z, так и для тока двигателей были записаны для каждого профиля местности путем проведения испытаний на t = 40 с в течение прямой линии на определенной местности, в то время как эквивалентный путь был получен во время маневра руления на той же местности, с t = 10 с, для создания реляционной базы данных, где каждая местность формально описывается диапазоном средних значений. На рис. 13 показаны выборки средних значений, относящихся к некоторым основным профилям рельефа. Данные были сохранены в текстовом файле, где каждый массив выборок состоял из четырех числовых значений (эквивалентная дорожка, ток двигателей, PSD сверх ускорений, PSD сверх токов). Впоследствии вдоль узла ROS была разработана вероятностная графическая модель на основе байесовской сети, представляющая группу переменных и их условные зависимости с использованием направленного ациклического графа (DAG) для сравнения данных, полученных датчиком в режиме онлайн, с набором данных, хранящимся в базе данных.Этот узел ROS использовался для вывода онлайновых оценок профиля местности путем запуска вероятностного алгоритма на данных в реальном времени, поступающих от датчиков транспортного средства.
На рис. 13 показаны выборки средних значений, относящихся к некоторым основным профилям рельефа. Данные были сохранены в текстовом файле, где каждый массив выборок состоял из четырех числовых значений (эквивалентная дорожка, ток двигателей, PSD сверх ускорений, PSD сверх токов). Впоследствии вдоль узла ROS была разработана вероятностная графическая модель на основе байесовской сети, представляющая группу переменных и их условные зависимости с использованием направленного ациклического графа (DAG) для сравнения данных, полученных датчиком в режиме онлайн, с набором данных, хранящимся в базе данных.Этот узел ROS использовался для вывода онлайновых оценок профиля местности путем запуска вероятностного алгоритма на данных в реальном времени, поступающих от датчиков транспортного средства.
Рисунок 13 . Справочные значения для некоторых профилей местности.
5. Заключение
В этой статье был представлен метод определения характеристик местности с использованием гусеничного транспортного средства с бортовым поворотом и независимой пассивной подвеской. Он основан на оценке трех параметров, зависящих от рельефа местности: моторных токов, эквивалентной трассы и спектральной плотности мощности.Эти параметры можно измерить во время обычного вождения, отслеживая движение автомобиля, токи двигателя и ускорения вдоль вертикальной оси. Наблюдатель Калмана на основе модели был введен для оценки проскальзывания, а функция спектральной плотности мощности использовалась для изучения реакции автомобиля на вибрацию для различных профилей местности. Эксперименты показывают, что классификатор может эффективно различать четыре типа профилей местности, включая асфальт, гравий, грязь и песок, с высокой точностью более 89 % для гравия и песка, как показано на рисунке 14.Обнаружение грязи имеет вероятность успеха около 72% и требует дальнейших исследований из-за его непредсказуемого характера, в основном на гусеничных транспортных средствах. Дальнейшее продолжение этого исследования также будет учитывать смещение и положение подвески путем считывания данных с линейных потенциометров, установленных параллельно на каждом амортизаторе, чтобы исследовать частотную характеристику каждой подвески.
Он основан на оценке трех параметров, зависящих от рельефа местности: моторных токов, эквивалентной трассы и спектральной плотности мощности.Эти параметры можно измерить во время обычного вождения, отслеживая движение автомобиля, токи двигателя и ускорения вдоль вертикальной оси. Наблюдатель Калмана на основе модели был введен для оценки проскальзывания, а функция спектральной плотности мощности использовалась для изучения реакции автомобиля на вибрацию для различных профилей местности. Эксперименты показывают, что классификатор может эффективно различать четыре типа профилей местности, включая асфальт, гравий, грязь и песок, с высокой точностью более 89 % для гравия и песка, как показано на рисунке 14.Обнаружение грязи имеет вероятность успеха около 72% и требует дальнейших исследований из-за его непредсказуемого характера, в основном на гусеничных транспортных средствах. Дальнейшее продолжение этого исследования также будет учитывать смещение и положение подвески путем считывания данных с линейных потенциометров, установленных параллельно на каждом амортизаторе, чтобы исследовать частотную характеристику каждой подвески.
Рисунок 14 . Точность предлагаемого метода классификации.
Доступность данных
Наборы данных, созданные для этого исследования, доступны по запросу соответствующему автору.
Вклад авторов
Оба автора внесли значительный вклад в разработку концепции и дизайна исследования. Они в равной степени занимались анализом и интерпретацией данных, а также написанием рукописи.
Финансирование
Исследование, приведшее к этим результатам, получило финансирование от Европейской комиссии Horizon 2020 в соответствии с соглашением о гранте n. 821988 АДЭ.
Заявление о конфликте интересов
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Каталожные номера
Беллоне, М., Рейна, Г., Кальтаджироне, Л., и Вахде, М. (2018). Изучение проходимости по облакам точек в сложных сценариях. IEEE Trans. Интел. Транспорт. Сист. 19, 296–305. doi: 10.1109/TITS.2017.2769218
IEEE Trans. Интел. Транспорт. Сист. 19, 296–305. doi: 10.1109/TITS.2017.2769218
Полнотекстовая перекрестная ссылка | Академия Google
Брукс, К. и Ягнемма, К. (2005). Классификация местности на основе вибрации для планетарных исследовательских марсоходов. IEEE Trans. Робот. 21, 1185–1191. дои: 10.1109/ТРО.2005.855994
Полнотекстовая перекрестная ссылка | Академия Google
Бротен, Г. Д., Маккей, Д., и Коллиер, Дж. (2012). «Вероятностное обнаружение препятствий с использованием карт местности размером 2 1/2 D», в Proceedings of the 9th Conference on Computer and Robot Vision (CRV) 2012 г. (Торонто, Онтарио), 17–23.
Академия Google
Дюпон Э., Мур К., Коллинз Э. и Койл Э. (2008). Метод частотной характеристики для классификации местности в автономных наземных транспортных средствах. Автономные роботы 24, 337–347.doi: 10.1007/s10514-007-9077-0
Полнотекстовая перекрестная ссылка | Академия Google
Эльфес А. , Бергерман М., Карвальо Дж. Р. Х., Пайва Э., Рамос Дж. и Буэно С. (1999). «Ансамбли роботов «воздух-земля» для совместных приложений: концепции и предварительные результаты», в 2-й Международной конференции по полевой и сервисной робототехнике (Питтсбург, Пенсильвания), 75–80.
, Бергерман М., Карвальо Дж. Р. Х., Пайва Э., Рамос Дж. и Буэно С. (1999). «Ансамбли роботов «воздух-земля» для совместных приложений: концепции и предварительные результаты», в 2-й Международной конференции по полевой и сервисной робототехнике (Питтсбург, Пенсильвания), 75–80.
Академия Google
Хенсон, Г., Мейнард, М., Димитоглу, Г., и Лю, X. (2008). «Алгоритмы и анализ производительности для навигации по пути автономных роботов, управляемых Аккерманом», в материалах 8-го семинара по показателям производительности для интеллектуальных систем (Гейтерсбург, Мэриленд), 230–235.дои: 10.1145/1774674.1774710
Полнотекстовая перекрестная ссылка | Академия Google
Джин, П., Ли, П., Ван, К., и Пу, З. (2015). Разработка и применение новых параметров спектральных характеристик для классификации типов почвенных солей в засушливых землях. Экол. Указать 54, 116–123. doi: 10.1016/j.ecolind.2015.02.028
Полнотекстовая перекрестная ссылка | Академия Google
Ли, Л. и Санду, К. (2013). Стохастическое моделирование одномерных и двумерных профилей местности с использованием подхода полиномиального хаоса. Междунар. J. Транспортное средство Des. 63, 305–326. дои: 10.4271/2005-01-3559
и Санду, К. (2013). Стохастическое моделирование одномерных и двумерных профилей местности с использованием подхода полиномиального хаоса. Междунар. J. Транспортное средство Des. 63, 305–326. дои: 10.4271/2005-01-3559
Полнотекстовая перекрестная ссылка | Академия Google
Мартинес, Дж., Мандоу, А., Дж. Моралес, С.П., и Гарка-Сересо, А. (2005). Аппроксимационная кинематика гусеничных мобильных роботов. Междунар. Дж. Робот. Рез. , 24, 867–878. дои: 10.1177/0278364
8239
Полнотекстовая перекрестная ссылка | Академия Google
Маша Д., Берк М. и Твала Б. (2017). «Методы оценки скольжения для проприоцептивной классификации местности с использованием гусеничных мобильных роботов», в Ассоциации распознавания образов Южной Африки и робототехники и мехатроники (PRASARobMech) (Блумфонтейн), 1–7.
Академия Google
Милелла А., Рейна Г. и Андервуд Дж. (2015). Самообучающаяся платформа для статистической классификации местности с использованием радиолокатора и монокулярного зрения. Дж. Полевой робот. 32, 20–41. doi: 10.1002/роб.21512
Дж. Полевой робот. 32, 20–41. doi: 10.1002/роб.21512
Полнотекстовая перекрестная ссылка | Академия Google
Нарваес Ф., Рейна Г. и др. (2017). Обзор методов ранжирования и визуализации для фенотипирования точного земледелия. IEEE ASME Trans. Мехатрон. 22, 2428–2439.doi: 10.1109/ТМЕЧ.2017.2760866
Полнотекстовая перекрестная ссылка | Академия Google
Охеда, Л., Боренштейн, Дж., Витус, Г., и Карлсен, Р. (2006). Характеристика и классификация местности с помощью мобильного робота. Дж. Полевой робот. 23, 103–122. doi: 10.1002/роб.20113
Полнотекстовая перекрестная ссылка | Академия Google
Пентцер Дж., Бреннан С. и Райхард К. (2014). Прогнозирование кинематики робота с бортовым поворотом на основе модели с использованием онлайн-оценки мгновенных центров вращения гусеницы. Дж. Полевой робот. 31, 455–476. doi: 10.1002/роб.21509
Полнотекстовая перекрестная ссылка | Академия Google
Рейна, Г. , Пайано, М., и Бланко-Кларако, Дж. (2017b). Оценка параметров транспортного средства с использованием оценщика на основе модели. Мех. Сист. Сигнальный процесс , 87, 227–241. doi: 10.1016/j.ymssp.2016.06.038
, Пайано, М., и Бланко-Кларако, Дж. (2017b). Оценка параметров транспортного средства с использованием оценщика на основе модели. Мех. Сист. Сигнальный процесс , 87, 227–241. doi: 10.1016/j.ymssp.2016.06.038
Полнотекстовая перекрестная ссылка | Академия Google
Рейна, Г. и Галати, Р. (2016). Оценка рельефа местности на основе проскальзывания с помощью автомобиля с бортовым поворотом. Сист. автомобиляДинам. 54, 1384–1404. дои: 10.1080/00423114.2016.1203961
Полнотекстовая перекрестная ссылка | Академия Google
Рейна Г., Милелла А. и Галати Р. (2017a). Оценка местности для точного земледелия с использованием динамического моделирования транспортных средств. Биос. англ. 162, 124–139. doi: 10.1016/j.biosystemseng.2017.06.025
Полнотекстовая перекрестная ссылка | Академия Google
Ротрок Б., Папон Дж., Кеннеди Р., Оно М. и Хеверли М. (2016). «SPOC: классификация местности на основе глубокого обучения для миссий марсохода», в Космическом форуме AIAA (Лонг-Бич, Калифорния), 1–12.
Академия Google
Шефер Х., Лукш Т. и Бернс К. (2005). «Обнаружение и предотвращение препятствий для мобильных наружных роботов», на конференции EOS по промышленной визуализации и машинному зрению, 13–15 июня, (Мюнхен).
Академия Google
Classes | |
| class | chrono::vehicle::ChTrackAssembly |
| Определение сборки гусеницы.Подробнее… | |
| class | chrono::vehicle::ChTrackContactManager |
| Class Подробнее… | |
| класс | chrono::vehicle::ChTrackCustomContact |
| chrono::vehicle::ChTrackedVehicle Подробнее… | |
| класс | chrono::vehicle::ChTrackAssemblyBand |
| 2 | 3 |
| Class | Chrono :: Транспортное средство :: ChtruCassemblyBandancf |
| Определение непрерывной полосы Узел Узел на основе Ancfshell. натяжной ролик (с натяжным механизмом), комплект подвесок (катков в сборе) и набор гусеничных башмаков.Подробнее … | 3 |
| Class | Chrono :: Автомобиль :: Chtrucassemblybandbushing | 9099 Определение непрерывной полосы Узел Узел с использованием втулкой на основе втулке. натяжной ролик (с натяжным механизмом), комплект подвесок (катков в сборе) и набор гусеничных башмаков. Подробнее… натяжной ролик (с натяжным механизмом), комплект подвесок (катков в сборе) и набор гусеничных башмаков. Подробнее… |
| class | chrono::vehicle::ChTrackAssemblyDoublePinПодробнее… |
| класс | chrono::vehicle::ChTrackAssemblySegmented |
| класс гусениц в сборе сегменты. Подробнее… | |
| класс | chrono::vehicle::ChTrackAssemblySinglePin |
| 2 | гусеница в сборе. Подробнее… |
| класс | chrono::vehicle::TrackAssemblyBandANCF |
| 1 | |
| 3 | |
| Class | Chrono :: Транспортное средство :: TrackassEmblyBandbushing |
| Модель монтажной камеры Band-Bushing Track Assement, построенная из файла спецификации JSON. Подробнее… | |
| class | chrono::vehicle::TrackAssemblyDoublePin |
| 1 файл спецификации сборки модели SON.Подробнее… | |
| class | chrono::vehicle::TrackAssemblySinglePin |
| класс | chrono::vehicle::TrackedVehicle |
| 9091 модель гусеничного транспортного средства. | |
 Более.
Более.

Добавить комментарий