Автовышка 22 м технические характеристики: Автовышка АГП-22 (22 метра) : технические характеристики
Автовышка АГП-22 (22 метра) : технические характеристики
Фото автовышка локтевая АГП-22 высота подъема 22 метра
Завод производитель: 86 Механический завод-филиал ФГУП ПЭУ МО РФ (86МЗ)
413117, Россия, Энгельс, Саратовская обл., ул. Тракторная, 1
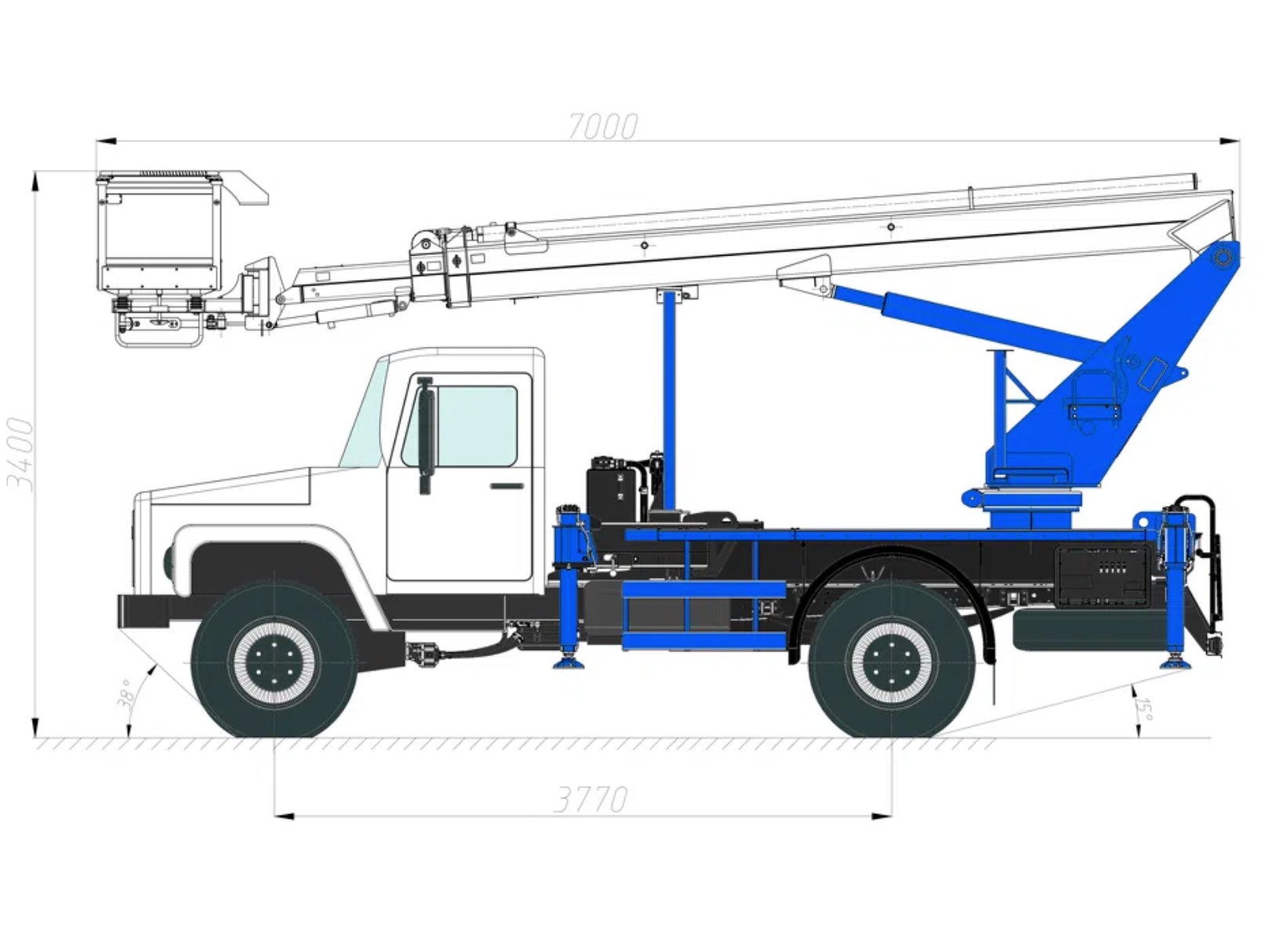
Автовышка АГП-22 : технические характеристики
| Высота подъема люльки | 22 метра |
| Мах. вылет стрелы, м | 10,5 |
| Масса, кг | 8900 |
| Шасси | автомобиль ЗИЛ-433442, 6х6 (Аналог ЗИЛ-131) |
| Мах. грузоподъемность люльки, кг | 300 |
| Габаритные размеры, мм | 11840/ 2500/ 3570 |
| Угол поворота стрелы, град | 360 |
| Опорный контур, мм | 4240/ 4000 |
| Скорость движения наибольшая, км/ч | 50 |
| Время полного подъёма люльки на наибольшую высоту, с | 130 |
| Рабочее давление в гидросистеме, МПа | 10 |
| Допустимый при работе подъёмника угол наклона местности, град | 5 |
| Допустимая при работе скорость ветра, м/c | до 10 |
| Угол подъёма нижнего локтя, град | 80 |
| Угол подъёма верхнего локтя, град | 160 |
| Место управления | На опорной раме и два пульта на поворотной раме |
| Способ управления | Гидравлический |
| Тип | локтевая |
| Продажа автовышек АГП-22 | Купить или взять в аренду автовышку АГП-22 по низкой цене можно у компании 86 Механический завод, которая занимается их производством и реализацией. |
Автовышка АГП-22 (22 метра) : на базе ЗИЛ-131, харктеристики
Фото автовышка АГП-22 на базе ЗИЛ-131, макс. высота 22 метра
Завод производитель: 86 Механический завод-филиал ФГУП ПЭУ МО РФ (86МЗ)
413117, Россия, Энгельс, Саратовская обл., ул. Тракторная, 1
Автовышка АГП-22 : технические характеристики
| Высота подъема люльки | 22 метра |
| Мах. вылет коленной стрелы, м | 10,5 |
| Масса, кг | 8900 |
| Шасси | автомобиль АМУР-531305, АМУР-533100, 6х6 (аналог ЗИЛ-131НА 6х6) |
| Мах. грузоподъемность люльки, кг | 300 |
| Габаритные размеры, мм | 11840/ 2500/ 3570 |
| Угол поворота стрелы, град | 360 |
| Опорный контур, мм | 4240/ 4000 |
| Скорость движения наибольшая, км/ч | 50 |
| Время полного подъёма люльки на наибольшую высоту, с | 130 |
| Рабочее давление в гидросистеме, МПа | 10 |
| Допустимый при работе подъёмника угол наклона местности, град | 5 |
| Допустимая при работе скорость ветра, м/c | до 10 |
| Угол подъёма нижнего колена, град | 80 |
| Угол подъёма верхнего колена, град | 160 |
| Место управления | На опорной раме и два пульта на поворотной раме |
| Способ управления | Гидравлический |
| Тип стрелы | коленная |
| Продажа, аренда АГП-22 | Купить или взять в аренду автовышку АГП-22 на базе ЗИЛ-131 по низкой цене можно у компании 86 Механический завод, которая занимается их производством и реализацией. |
Автовышка (АГП) ТА-22 на базе ГАЗон НЕКСТ С41А23
Подъемник ТА-22 может быть смонтирован на шасси автомобилей ГАЗ. Автогидроподъемник работает при температуре окружающей среды от – 40° С до + 40° С.
Компания Масс-Кран рада предложить Вам ТА-22 на шасси ГАЗон НЕКСТ 4Х4 (1ряд кабина)
Подъемник ТА-22 смонтирован на шасси автомобилей ГАЗон НЕКСТ 4Х4 предназначен для проведения строительно-монтажных и эксплуатационных работ в различных сферах производства, требующих подъема людей с материалами и инструментами на высоту до 22 м.
Наличие изолированной люльки позволяет выполнять обслуживание электрических установок напряжением до 1000 В без его отключения. Подъемник снабжен двумя пультами управления навесным оборудованием: выносным и расположенным в люльке. Автогидроподъемник работает при температуре окружающей среды от – 40° С до + 40° С.
Технические характеристики автогидроподъемника ТА-22 на шасси ГАЗ 3309
Колесная формула | 4х2 |
Число мест в кабине шасси | 3 |
Рабочая высота подъема, м | 22 |
Максимальный вылет стрелы, м | 13 |
Грузоподъемность люльки, кг | 300 |
Время подъема люльки на максимальную высоту, с | 120 |
Угол вращения поворотной части, град. | 295 |
Полная масса, кг | 6480 |
| Габаритные размеры, мм Длина Ширина Высота | 7270 |
Допускаемое рабочее напряжение при работе подъемника, В | 1000 |

Автовышки (АГП) от компании Мас-авто – это надежная автотехника готовая работать в самых различных условиях. Продажа АГП происходит на основании договора поставки. Приобрести АГП в нашей компании можно как за счет собственных средств, а также в кредит и в лизинг. Специалисты помогут подобрать выгодные условия кредитования с учетом минимальных процентных ставок.
Менеджеры Мас-авто помогут выбрать необходимую модель автовышки на шасси, которая наилучшим образом подойдет для выполнения ремонтных и монтажных работ, которые выполняет Ваша организация, чтобы соотношения цена/качество/технические характеристики АГП были наиболее оптимальны.
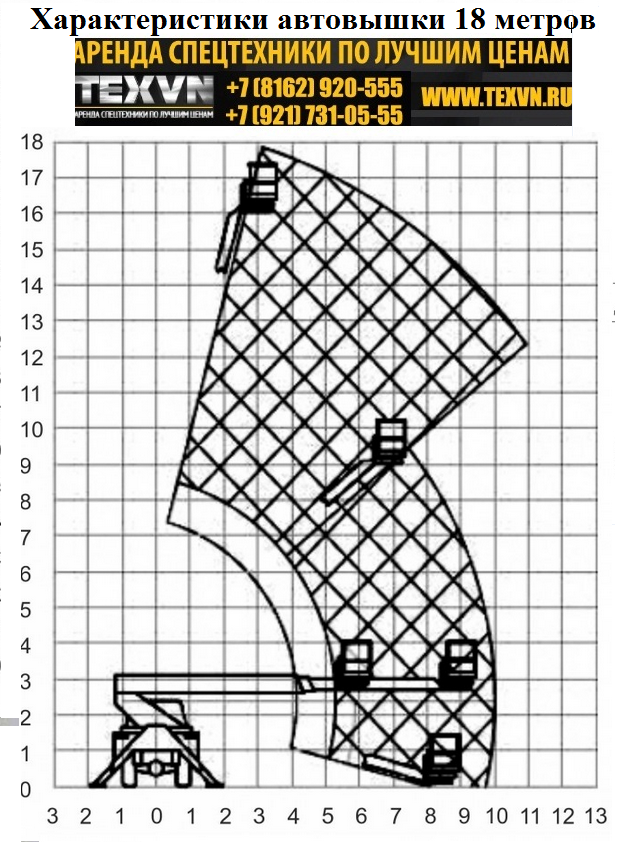
технические характеристики Автовышки ВС-22.
 Статьи компании «ООО “АВТОВЫШКА82″» ~~Технические характеристики автовышки ВС-22, высотные:
Статьи компании «ООО “АВТОВЫШКА82″» ~~Технические характеристики автовышки ВС-22, высотные:Высота подъема автовышки ВС 22: 22 м Вылет стрелы автовышки ВС 22: 9,5 м Грузоподъемность автовышки ВС 22: 200 кг
Технические характеристики автовышки ВС-22, габаритные:
Длина автовышки вс-22 ЗИЛ: 1110 мм Ширина автовышки вс-22 ЗИЛ: 2500 мм Высота автовышки вс-22 ЗИЛ: 3850 мм
Автовышка ВС-22 ЗИЛ (вышка ВС 22) — автовышка средневысотного типа. Как одна из наиболее распространенных моделей аренды, автовышка ВС-22 (вышка ВС 22) отличается широким спектром возможностей по приемлемой цене. Конструктивно, автовышка 22 метра ВС 22 (вышка ВС-22) имеет коленчатую, двухсекционную стрелу, максимальная длина которой, в разложенном положении, достигает 22 метров. Секции стрелы автовышки вс-22 (вышки вс 22) соединяются через локтевое крепление.
 Нередко, автовышки вс-22 (вышки вс 22) пользуются спросом при погрузо-разгрузочных работах, для закрепления и контроля груза. Установка освещения, видеокамер, рекламных растяжек и многое другое, легко выполнимо, если взять в аренду автовышку ВС-22 (вышку ВС 22).
Нередко, автовышки вс-22 (вышки вс 22) пользуются спросом при погрузо-разгрузочных работах, для закрепления и контроля груза. Установка освещения, видеокамер, рекламных растяжек и многое другое, легко выполнимо, если взять в аренду автовышку ВС-22 (вышку ВС 22).Предоставление доступа — легкая задача для автовышки ВС-22 (вышки ВС 22). При помощи полноповоротной стрелы, системы контроля горизонтального уровня люльки, системы плавного хода, возможности подачи корзины в горизонтальном направлении и грузоподъемности до 250 кг, автовышка поможет решить любую высотную проблему в пределах 22 метров.
Техническая схема автовышки ВС-22 изображение (фото, картинка): высотная, грузовысотная, габаритная схемы вышки вс 22 зил Автовышка ВС 22, фото, картинка, изображение вышки вс-22 ЗИЛ Автовышка ВС-22 ЗИЛ (вышка ВС 22) имеет множество аналогов. В нашем парке предоставляется аренда автовышки ВС-22 (вышки ВС 22) и схожих коленчатых моделей по одинаковой цене. Также имеются телескопические модели 22 метра! Нужен подъемник? Звоните!
Автовышка 22м на шасси КАМАЗ 43253
| |||||||||||||||||||||||||||

Предупреждение: мы собираем метаданные пользователя для функционирования сайта и, если Вы не хотите, чтобы эти Ваши данные обрабатывались, то Вы должны покинуть сайт
22 м | Автогидроподъемники
Аэродромный автогидроподъемник ВС-22.06-А на базе шасси автомобиля КамАЗ-4326 предназначен для подъема людей и оборудования на высоту до 22 метров при обслуживании воздушных судов.
Технические характеристики автовышки
Автовышка ВС-222-01 предназначена для проведения работ на высоте до 22 метров. Подъемное оборудование смонтировано на вездеходном шасси автомобиля Амур-531320 (6х6). Максимально допустимая скорость ветра при работе на высоте 10 м — 10 м/с. Время подъема люльки на наибольшую высоту — 150 сек.
Подъемное оборудование смонтировано на вездеходном шасси автомобиля Амур-531320 (6х6). Максимально допустимая скорость ветра при работе на высоте 10 м — 10 м/с. Время подъема люльки на наибольшую высоту — 150 сек.
Технические характеристики автовышки
Автовышка ПСС-121.22 на шасси повышенной проходимости Урал-4320 (6х6). Автовышка оснащена двухколенной стрелой, с высотой подъема 22 метра. Максимальный горизонтальный вылет стрелы составляет 10,5 м. Автовышка может использоваться при монтаже и ремонте жилых, промышленных и общественных зданий, линий электропередач и связи.
Технические характеристики автовышки
Двухколенная автовышка ВС-22А-12 на базе шасси автомобиля Амур 53-13-20 (6х6) предназначена для подъема людей на высоту до 22 метров, с целью проведения проведения ремонтно-строительных работ на линиях связи и электропередач. Высота подъема — 22 метра, вылет — 9,5 м.
Технические характеристики автовышки
Автовышка ПСС-121. 22 на шасси МАЗ-438043 предназначена для подъема людей и оборудования на высоту до 22 метров. Тип стрелы автоподъемника — коленчатый, двухколенный. Подъемник может использоваться при монтаже и ремонте жилых, промышленных и общественных зданий, линий электропередач и связи, теплоизоляции наружных трубопроводов и других работах.
22 на шасси МАЗ-438043 предназначена для подъема людей и оборудования на высоту до 22 метров. Тип стрелы автоподъемника — коленчатый, двухколенный. Подъемник может использоваться при монтаже и ремонте жилых, промышленных и общественных зданий, линий электропередач и связи, теплоизоляции наружных трубопроводов и других работах.
Технические характеристики автовышки
Автовышка ВС-22А-11 на шасси Амур 53-13-30 предназначена для подъема людей и материалов с целью производства строительных, ремонтных и эксплутационных работ на высоте. Высота подъема — 22 м., вылет стрелы — 9,5 м.
Технические характеристики автовышки
Автовышка ПСС-121.22 предназначена для подъема людей с материалом и инструментом на высоту до 22 м в соответствии с зоной обслуживания. Автовышка может использоваться при монтаже и ремонте жилых, промышленных и общественных зданий, линий электропередач и связи, теплоизоляции наружных трубопроводов и других работах. Автовышка может выполнять работы при температуре от -40°С до +40°С и при скорости ветра на высоте до 10 м не более 10 м/с. Климатическое исполнение -У, категория размещения 1 по ГОСТ 15150-69; 1-3 ветровой район России в соответствии с ГОСТ 1451-77.
Климатическое исполнение -У, категория размещения 1 по ГОСТ 15150-69; 1-3 ветровой район России в соответствии с ГОСТ 1451-77.
Технические характеристики автовышки
Автовышка ВС-22А на шасси ЗиЛ-433362 предназначена для перемещения людей с инструментами и материалами в люльке, с целью производства работ на высоте до 22 метров.
Технические характеристики автовышки
Автовышка ВС-22.06 на шасcи КамАЗ-4326 (4х4) с трехколенчатой стрелой предназначена для подъема людей и материалов с целью производства работ на высоте при строительных, ремонтных и эксплуатационных работах. При установленой электроизоляции на автовышке ВС 22.06 можно работать на электроустановках до 1000 В без снятия напряжения. Особенно актуально использование автовышки ВС 22.06 на шасси КамАЗ-4326 при производстве работ в труднодоступных местах, в том числе при полном бездорожье.
Технические характеристики автовышки
Автовышка ПСС-121.22 на шасси КамАЗ-43253 предназначена для подъема людей и оборудования на высоту до 22 метров. Тип стрелы автоподъемника — коленчатый, двухколенный. Подъемник может использоваться при монтаже и ремонте жилых, промышленных и общественных зданий, линий электропередач и связи, теплоизоляции наружных трубопроводов и других работах.
Тип стрелы автоподъемника — коленчатый, двухколенный. Подъемник может использоваться при монтаже и ремонте жилых, промышленных и общественных зданий, линий электропередач и связи, теплоизоляции наружных трубопроводов и других работах.
Технические характеристики автовышки
Автовышка ВС-22.06 на шасии КамАЗ-4326 (4х4) с двухколенчатой стрелой предназначена для подъема людей и материалов с целью производства работ на высоте при строительных, ремонтных и эксплуатационных работах. Особенно актуально использование автовышки ВС 22.06 на шасси КамАЗ-4326 при производстве работ в труднодостыпных местах, в том числе при полном бездорожье.
Технические характеристики автовышки
Автовышка ПСС-121.22 предназначена для выполнения строительно-монтажных и электротехнических работ на высоте до 22 метров в соответствии с зоной обслуживания. Автовышка ПСС-121.22 может использоваться при монтаже и ремонте жилых, промышленных и общественных зданий, линий электропередачи и связи, теплоизоляционных и на других работах, требующих доставки людей и оборудования на высоту.
Технические характеристики автовышки
Автовышка ВС-22.06 на базе шасси автомобиля КамАЗ-43253. Автовышка предназначена для подъема людей с инструментами на высоты до 22 метров. Отличная альтернатива автовышки ВС-22 на шасси ЗИЛ.
Технические характеристики автовышки
Автовышка ПСС-121.22 на шасси ЗИЛ-433362 предназначена для подъема людей и оборудования на высоту до 22 метров. Тип стрелы автоподъемника — коленчатый, двухколенный. Подъемник может использоваться при монтаже и ремонте жилых, промышленных и общественных зданий, линий электропередач и связи, теплоизоляции наружных трубопроводов и других работах.
Технические характеристики автовышки
Автовышка ВС-22.05 на шасси Урал-4320 (6х6) предназначена для подъема людей с оборудованием на высоту до 22 метров, с целью проведения ремонтно-монтажных работ. Трехколенная конструкция автогидроподъемника смонтирована на вездеходное шасси автомобиля Урал-4320, что позволяет осуществлять ремонтные работы в труднопроходимых местах, в условиях бездорожья.
Технические характеристики автовышки
Заказать автовышку АГП-22.04: цена аренды, технические характеристики, фото
| Автовышка (автогидроподъемник трехколенный) АГП-22.04 | |
| Тип установки | трехколенная стрела с люлькой |
| Количество колен | 3 |
| Рабочая высота подъема, м | 22 |
| Горизонтальный вылет люльки, м | 13 |
| Грузоподъёмность люльки, кг | 300 |
| Угол поворота, ° | 360 |
| Базовое шасси | ЗИЛ 508 |
| Колесная формула | 4х2 |
| Максимальная транспортная скорость передвижения, км/ч | 80 |
Максимальная частота вращения поворотной части, об. /мин /мин | 0,5 |
| Время подъема люльки на наибольшую высоту, сек. | 120 |
| Мощность двигателя автомобиля, л.с. | 134 |
| Полная масса, т | 8.7 |
| Габариты: длина / ширина / высота м | 10.2/2.5 /3.5 |
Главная задача автовышки – обеспечить рабочим и материалам безопасный подъем на высотный производственный объект для выполнения работ разной сложности. Например, ремонта кирпичной кладки, оштукатуривание и окраска фасадов, замена и ремонт антенн, водостоков, остекление, установка рекламных щитов и прочего.
С этими и многими другими задачами отлично справится автовышка отечественного производства АГП – 22.04.
Как показывает практика, определиться с тем, какой тип подъёмника необходим непросто. У специалистов нашей компании есть все необходимое для того, чтобы оказать в этом помощь – знания и многолетний опыт. Они предоставят грамотную консультацию, ответят на интересующие вопросы, подберут автогидроподъёмник, который позволит реализовать задуманное.
Они предоставят грамотную консультацию, ответят на интересующие вопросы, подберут автогидроподъёмник, который позволит реализовать задуманное.
Высота подъёма стрелы в
Данной автовышке – 22 м. На ней можно выполнять работы любой сложности. Люлька при подъёме мобильна и маневренна.
Автогидроподъёмник имеет три колена. Он станет идеальным для проведения операций в рамках установленной высоты и массы подъёма.
Иван 19.01.2021
Компания и сама техника мне очень нравится, но вот решил оставить отзыв о конкретном экземпляре Автовышка АГП-18.04. Автомобиль – настоящий трудяга, без которого не обойтись. Вся работа была выполнена быстро и без проблем, а отличительная черта этой вышки – простота, и чёткость выполненных задач.
Выражаю благодарность, сотрудникам компании.
Алла Михайловна 04.02.2021
Предприятие, на котором я работаю, очень часто берёт технику в аренду по некоторым причинам для нас это выгоднее.
Подобные автовышки и конкретно эту АГП-18.04 берём для ремонта электрических сетей, обрезания деревьев, применяются даже в экстренных случаях по спасению людей.
Спасибо за долгое сотрудничество и чётко выполненные задачи!
Оставить отзыв о “Автовышке АГП-22.04”
Бронто Аренда Канатных Подъемников | Карди Оборудование
Рабочие из различных отраслей — энергетики, строительства, коммунальных услуг и т. д. — полагаются на воздушные подъемники и подъемные платформы, чтобы подняться на высоту, необходимую для выполнения работы. Аренда Bronto Skylift от Kardie Equipment — идеальный выбор: они безопасны и просты в установке, с такими удобными функциями, как встроенные инструменты для подачи воды, электричества и воздуха в электропривод, аварийный слив и автоматическое выравнивание выносных опор.
Мы предлагаем самый большой парк самоходных подъемных рабочих платформ для аренды выше 150 футов.Наши подразделения расположены по всей Северной Америке и позволяют нам обеспечить лучшую доступность, более низкие затраты на мобилизацию и более низкие ставки. Все арендованные автовышки Kardie Equipment производятся компанией Bronto Skylift и были специально изготовлены для Kardie Equipment в соответствии со всеми нормами DOT Северной Америки, стандартами ANSI и требованиями OSHA.
Все арендованные автовышки Kardie Equipment производятся компанией Bronto Skylift и были специально изготовлены для Kardie Equipment в соответствии со всеми нормами DOT Северной Америки, стандартами ANSI и требованиями OSHA.
Аренда стреловых подъемников через Kardie Equipment дает огромное преимущество. Гибкость при аренде автовышки является ключевой для компаний с разовыми проектами продолжительностью от пары недель до месяца.Мы всегда будем делать все возможное, чтобы приспособиться к любому неожиданному техническому обслуживанию, а наша программа аренды позволяет нам работать в соответствии с вашим графиком. И если вы, как клиент, арендуете подъемную платформу несколько раз в год, мы предлагаем арендные ставки, арендные ставки с выкупом и долгосрочные арендные ставки.
Доступные модели
В настоящее время Kardie предлагает пять (5) моделей автовышек для аренды автовышки: Bronto Skylifts S150XDT, S173XDT, S230XDT, 230 XR и S295HLA. Все эти подъемные рабочие платформы доступны для аренды. И в отличие от кранов и корзин для людей, ножничных подъемников и строительных лесов, AWP Bronto, устанавливаемые на грузовиках, безопасны, эффективны и надежны.
И в отличие от кранов и корзин для людей, ножничных подъемников и строительных лесов, AWP Bronto, устанавливаемые на грузовиках, безопасны, эффективны и надежны.
БРОНТО S150 XDT
- Максимальная рабочая высота: 45 м / 150 футов вертикального вылета
- Максимальный вылет: 24 м / 80 футов горизонтального вылета
- Максимальный вылет: 35 м / 115 футов
- Максимальный радиус действия: 20 м / 60 футов
- Максимальная вместимость корзины: 680 кг / 1400 фунтов
- Электричество: 1100 Вт при 110 В на уровне платформы
- Сжатый воздух: пневматическая линия 5/8, установленная на уровне платформы
- Голосовая команда внутренней связи
- Выдвижная платформа
- Система резервного питания от батареи
- Ручная система аварийного стравливания
- Идеально подходит для: Муниципалитетов, проводящих ремонт и общее техническое обслуживание линий электропередач небольшой мощности
БРОНТО S173 XDT
- Максимальная рабочая высота: 52 м / 173 фута вертикального вылета
- Максимальный вылет: 34 м / 110 футов горизонтального вылета
- Максимальный вылет: 42 м / 135 футов
- Максимальный радиус действия: 22 м / 70 футов
- Электричество: 1100 Вт при 110 В на уровне платформы
- Сжатый воздух: пневматическая линия 5/8, установленная на уровне платформы
- Голосовая команда внутренней связи
- Выдвижная платформа
- Система резервного питания от батареи
- Ручная система аварийного стравливания
- Идеально подходит для: Коммунального хозяйства, производства электроэнергии, строительства, мытья окон, покраски и т.
 д.
д.
 д.
д.БРОНТО S230 XDT
- Максимальная рабочая высота: 70 м / 230 футов вертикального вылета
- Максимальный вылет: 32 м / 105 футов горизонтального вылета
- Максимальный вылет: 48 м / 158 футов
- Максимальный радиус действия: 25 м / 82 фута
- Электричество: 1100 Вт при 110 В на уровне платформы
- Сжатый воздух: пневматическая линия 5/8, установленная на уровне платформы
- Голосовая команда внутренней связи
- Выдвижная платформа
- Система резервного питания от батареи
- Ручная система аварийного стравливания
- Идеально подходит для:
- Строительство: проекты, требующие подъема и преодоления различных конструкций
- Коммунальные услуги: добраться до высоких линий электропередач и вышек
БРОНТО 230 XR
- Максимальная рабочая высота: 70 м / 230 футов вертикального вылета
- Максимальный вылет: 35 м / 115 футов горизонтального вылета
- Максимальная высота платформы: 68 м / 224 фута
- Система удаленной диагностики
- Резервные операционные системы
- Автоматическое выравнивание выносных опор
- Платформа для схемы инструментов
- Радиатор гидравлического масла
- Встроенный индикатор скорости ветра
- Две вспомогательные линии 5/8 для входной корзины
- Идеально подходит для:
- Строительные и коммунальные проекты
БРОНТО 295 HLA
- Максимальная рабочая высота: 90 м / 295 футов вертикального вылета
- Максимальный вылет: 30 м / 100 футов горизонтального вылета
- Максимальный вылет: 55 м / 180 футов
- Максимальный радиус действия: 30 м / 105 футов
- Электричество: 1100 Вт при 110 В на уровне платформы
- Сжатый воздух: пневматическая линия 5/8, установленная на уровне платформы
- Голосовая команда внутренней связи
- Выдвижная платформа
- Система резервного питания от батареи
- Ручная система аварийного стравливания
- Идеально подходит для:
- Ветроэнергетика, достигающая гондолы ветряной турбины
Преимущества выбора Bronto Skylift
Bronto Skylift — это самый безопасный вариант канатной дороги для рабочих, которым необходимо вставать и подниматься. Стабильная платформа, система выносных опор и аварийные функции делают его превосходным по сравнению с ножничными подъемниками, сборщиками вишни и другими подъемными системами. В отличие от строительных лесов или других стреловых подъемников, Brontos можно привезти на месте и установить за считанные минуты. Гибкая выносная опора и автоматическое выравнивание облегчают работу даже на пересеченной или неровной местности.
Стабильная платформа, система выносных опор и аварийные функции делают его превосходным по сравнению с ножничными подъемниками, сборщиками вишни и другими подъемными системами. В отличие от строительных лесов или других стреловых подъемников, Brontos можно привезти на месте и установить за считанные минуты. Гибкая выносная опора и автоматическое выравнивание облегчают работу даже на пересеченной или неровной местности.
Интегрированные системы питания, воды и воздуха упрощают и делают более безопасной установку и эксплуатацию инструментов с платформы. А благодаря индикаторам скорости ветра, аварийному сливу воздуха, резервному аккумулятору и другим функциям безопасности, Bronto Skylift защищает сотрудников, предоставляя при этом гибкую и удобную альтернативу другим лифтовым системам.
Зачем арендовать оборудование Kardie?
В настоящее время Kardie предлагает пять (5) моделей автовышек для аренды автовышки: Bronto Skylifts S150XDT, S173XDT, S230XDT, 230 XR и S295HLA. Все эти подъемные рабочие платформы доступны для аренды. И в отличие от кранов и корзин для людей, ножничных подъемников и строительных лесов, AWP Bronto, устанавливаемые на грузовиках, безопасны, эффективны и надежны.
Все эти подъемные рабочие платформы доступны для аренды. И в отличие от кранов и корзин для людей, ножничных подъемников и строительных лесов, AWP Bronto, устанавливаемые на грузовиках, безопасны, эффективны и надежны.
У нас есть клиенты в следующих отраслях:
- Ветроэнергетика и возобновляемые источники энергии
- Энергия: нефтеперерабатывающий завод
- Строительство и снос
- Коммунальные услуги: передача и распределение
- Телекоммуникации
- Мойка окон
- Кино и СМИ
См. в фотогалерее ниже примеры проектов, в которых мы принимали участие.
Разработанная для широкого спектра применений, серия AMR40 предлагает множество функций, которых нет в обычных подъемниках. AMR40 является продуктом
выбор для клиентов с узкими проходами и перегруженными производственными средами. AMR40 — очень надежная машина, построенная по тем же жестким правилам, что и другие
Продукция «Лифт-А-Лофт». Вся машина сделана в США.
Вся машина сделана в США.
| Модель | АМР40-18 | АМР40-22 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Максимальная высота платформы | 22 фута 5 дюймов 6.83 м | 25’6 “ 7.77m | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Максимальная платформа высота @ Max Reach | 18’3″ 5.56m | 21’5 “ 6.53m | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Минимальная рост платформы | 24″ 60 см | 24 дюйма 60 см | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Максимальный вылет от центральной линии устройства | 8 футов 7 дюймов 2.62m | 8’7 “ 2.62m | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Вращение | 360 градусов Непрерывный | 360 градусов Непрерывный | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Емкость | 500 фунтов 226 кг. | 500 фунтов. 226 кг. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Вес блока | 7860 фунтов. 3565 кг. | 9040 фунтов. 4100 кг. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Общая высота в закрытом состоянии | 6 футов 7 дюймов 2.01m | 7’8 “ 2.34m | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Размер платформы | 36″ x 38 “ 91 см x 96″ x 38 “ 91 см x 96 см | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Общая длина | 9 футов 2 дюйма 2.79 м | 9’2 “ 2,79 м | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Общая ширина | 3’5″ 1.04m | 3’5 “ 1.04m | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Не стесняйтесь обращаться к нам по телефону или приходите без обязательств. Вы можете запросить предложение напрямую через кнопку цитаты.
Не стесняйтесь обращаться к нам по телефону или приходите без обязательств. Вы можете запросить предложение напрямую через кнопку цитаты.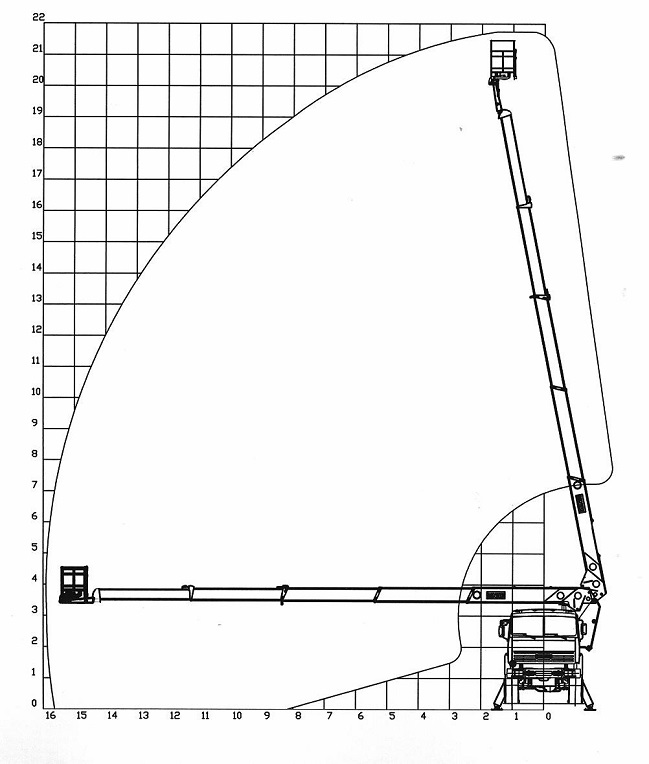 Вылет 12,34 м
Вылет 12,34 м Вылет 22,86 м
Вылет 22,86 м Вылет 10,90 м
Вылет 10,90 м Какой телескопический подъемник вам нужен, зависит от таких факторов, как грунт, рабочая высота и требуемая грузоподъемность.
Какой телескопический подъемник вам нужен, зависит от таких факторов, как грунт, рабочая высота и требуемая грузоподъемность. Нужна большая грузоподъемность? Тогда вам может быть лучше использовать ножничный подъемник. Нажмите здесь для обзора всех наших подъемных рабочих платформ.
Нужна большая грузоподъемность? Тогда вам может быть лучше использовать ножничный подъемник. Нажмите здесь для обзора всех наших подъемных рабочих платформ. Для планирования маршрута требовались три разных аспекта: район полета, характеристики камеры и задачи БПЛА.Этап предварительной обработки включал правильное выравнивание шести каналов мультиспектральных изображений, а также ортотрансформирование и создание мозаики отдельных изображений, полученных в каждом полете. Размер изображения в пикселях, площадь, покрываемая каждым изображением, и время полета были очень чувствительны к высоте полета. На меньшей высоте БПЛА снимал изображения с более высоким пространственным разрешением, хотя количество изображений, необходимых для покрытия всего поля, может быть ограничивающим фактором из-за энергии, необходимой для большей длины полета, и вычислительных требований для дальнейшего процесса создания мозаики.Спектральные различия между сорняками, сельскохозяйственными культурами и голой почвой были значительными в изучаемых вегетационных индексах (индекс избыточной зелени, нормализованный индекс зелено-красного различия и нормализованный индекс различия вегетации), в основном на высоте 30 м над уровнем моря.
Для планирования маршрута требовались три разных аспекта: район полета, характеристики камеры и задачи БПЛА.Этап предварительной обработки включал правильное выравнивание шести каналов мультиспектральных изображений, а также ортотрансформирование и создание мозаики отдельных изображений, полученных в каждом полете. Размер изображения в пикселях, площадь, покрываемая каждым изображением, и время полета были очень чувствительны к высоте полета. На меньшей высоте БПЛА снимал изображения с более высоким пространственным разрешением, хотя количество изображений, необходимых для покрытия всего поля, может быть ограничивающим фактором из-за энергии, необходимой для большей длины полета, и вычислительных требований для дальнейшего процесса создания мозаики.Спектральные различия между сорняками, сельскохозяйственными культурами и голой почвой были значительными в изучаемых вегетационных индексах (индекс избыточной зелени, нормализованный индекс зелено-красного различия и нормализованный индекс различия вегетации), в основном на высоте 30 м над уровнем моря. Однако большая спектральная разделимость была получена между растительностью и оголенной почвой с индексом NDVI. Эти результаты показывают, что согласование спектрального и пространственного разрешения необходимо для оптимизации полетной миссии в соответствии с каждой агрономической целью, зависящей от размера меньшего объекта, который необходимо различить (сорняки или участки сорняков).
Однако большая спектральная разделимость была получена между растительностью и оголенной почвой с индексом NDVI. Эти результаты показывают, что согласование спектрального и пространственного разрешения необходимо для оптимизации полетной миссии в соответствии с каждой агрономической целью, зависящей от размера меньшего объекта, который необходимо различить (сорняки или участки сорняков).
 PA охватывает все приемы и методы управления культурами и полями с учетом их локальной и местной неоднородности и изменчивости [2]. В контексте PA борьба с сорняками в начале сезона (ESSWM) включает в себя разработку методов обнаружения сорняков, растущих в посевах, и применение новых технологий, встроенных в конкретную сельскохозяйственную технику или оборудование, для успешной борьбы с ними, принятие мер для максимизировать экономические факторы и снизить воздействие применяемых контрольных измерений на окружающую среду [3].Эффективное развитие этих практик так или иначе зависит от использования технологий дистанционного зондирования для сбора и обработки пространственных данных с датчиков, установленных на спутниковых или воздушных платформах. Эта технология широко применяется в сельскохозяйственных исследованиях, позволяя картировать множество факторов [4], включая состояние посевов [5], свойства почвы [6], содержание воды [7] и распространение сорняков [8] среди прочего. Пилотируемые самолеты и спутники традиционно являются основными платформами, используемыми для получения удаленных изображений для локального и глобального сбора данных.
PA охватывает все приемы и методы управления культурами и полями с учетом их локальной и местной неоднородности и изменчивости [2]. В контексте PA борьба с сорняками в начале сезона (ESSWM) включает в себя разработку методов обнаружения сорняков, растущих в посевах, и применение новых технологий, встроенных в конкретную сельскохозяйственную технику или оборудование, для успешной борьбы с ними, принятие мер для максимизировать экономические факторы и снизить воздействие применяемых контрольных измерений на окружающую среду [3].Эффективное развитие этих практик так или иначе зависит от использования технологий дистанционного зондирования для сбора и обработки пространственных данных с датчиков, установленных на спутниковых или воздушных платформах. Эта технология широко применяется в сельскохозяйственных исследованиях, позволяя картировать множество факторов [4], включая состояние посевов [5], свойства почвы [6], содержание воды [7] и распространение сорняков [8] среди прочего. Пилотируемые самолеты и спутники традиционно являются основными платформами, используемыми для получения удаленных изображений для локального и глобального сбора данных. Однако эти платформы создают проблемы для многих аспектов точного земледелия, поскольку они ограничены в своих возможностях предоставлять изображения с адекватным пространственным и временным разрешением и сильно зависят от погодных условий [9]. В случае ESSWM хорошие результаты были получены на поздних стадиях роста (обычно на стадии цветения) с использованием аэрофотоснимков [10]–[11] и спутниковых [12] изображений, при этом сообщалось об экономии гербицидов более чем на 50%. Тем не менее, в большинстве сценариев с сорняками оптимальная обработка от сорняков рекомендуется на ранней стадии роста культуры, всего через несколько недель после появления всходов.На этой стадии картирование сорняков с помощью дистанционного зондирования представляет гораздо большие трудности, чем в случае поздней стадии сезона по трем основным причинам [13]: при очень малых размерах пикселей, часто порядка сантиметров [14]; 2) злаковые сорняки и однодольные культуры (например, Avena spp. в пшенице) или широколистные сорняки и многие двудольные культуры (например, Chenopodium spp.
Однако эти платформы создают проблемы для многих аспектов точного земледелия, поскольку они ограничены в своих возможностях предоставлять изображения с адекватным пространственным и временным разрешением и сильно зависят от погодных условий [9]. В случае ESSWM хорошие результаты были получены на поздних стадиях роста (обычно на стадии цветения) с использованием аэрофотоснимков [10]–[11] и спутниковых [12] изображений, при этом сообщалось об экономии гербицидов более чем на 50%. Тем не менее, в большинстве сценариев с сорняками оптимальная обработка от сорняков рекомендуется на ранней стадии роста культуры, всего через несколько недель после появления всходов.На этой стадии картирование сорняков с помощью дистанционного зондирования представляет гораздо большие трудности, чем в случае поздней стадии сезона по трем основным причинам [13]: при очень малых размерах пикселей, часто порядка сантиметров [14]; 2) злаковые сорняки и однодольные культуры (например, Avena spp. в пшенице) или широколистные сорняки и многие двудольные культуры (например, Chenopodium spp. у подсолнечника), как правило, имеют схожие отражательные свойства в начале сезона, что снижает возможность различения классов растительности с использованием только спектральной информации; и 3) фоновая отражательная способность почвы может мешать обнаружению [15].
у подсолнечника), как правило, имеют схожие отражательные свойства в начале сезона, что снижает возможность различения классов растительности с использованием только спектральной информации; и 3) фоновая отражательная способность почвы может мешать обнаружению [15].
 В целом, все эти авторы пришли к выводу, что эти системы дают очень многообещающие результаты для PA, и определили некоторые ключевые факторы для выбора оборудования и систем, такие как максимальная грузоподъемность БПЛА, надежность и стабильность платформы, возможности датчиков, дальность полета и маневренность БПЛА, среди прочего. 20]–[22].
В целом, все эти авторы пришли к выводу, что эти системы дают очень многообещающие результаты для PA, и определили некоторые ключевые факторы для выбора оборудования и систем, такие как максимальная грузоподъемность БПЛА, надежность и стабильность платформы, возможности датчиков, дальность полета и маневренность БПЛА, среди прочего. 20]–[22]. Кроме того, описаны этапы подготовки и выполнения полетов БПЛА с использованием обеих камер, а также отношения между высотой полета, размером пикселя, свойствами датчика и спектральной информацией изображения.
Кроме того, описаны этапы подготовки и выполнения полетов БПЛА с использованием обеих камер, а также отношения между высотой полета, размером пикселя, свойствами датчика и спектральной информацией изображения.
 Все датчики и устройства управления для полетов и навигации встроены в борт летательного аппарата и управляются компьютерной системой, которая может прослушивать данные телеметрии и принимать решения в соответствии с текущей полетной ситуацией и состоянием машины, что позволяет избежать случайной потери критически важных данных. связь между БПЛА и наземной станцией, что привело к крушению транспортного средства.
Все датчики и устройства управления для полетов и навигации встроены в борт летательного аппарата и управляются компьютерной системой, которая может прослушивать данные телеметрии и принимать решения в соответствии с текущей полетной ситуацией и состоянием машины, что позволяет избежать случайной потери критически важных данных. связь между БПЛА и наземной станцией, что привело к крушению транспортного средства.
 , время интегрирования). Каждый канал имеет фокусное расстояние 9,6 мм и 1,3-мегапиксельный (1280×1024 пикселей) CMOS-сенсор, который сохраняет изображения на компактной флэш-карте CF. Изображения могут быть получены с 8-битным или 10-битным радиометрическим разрешением. Камера оснащена настраиваемыми пользователем полосовыми фильтрами (Andover Corporation, Salem, NH, USA) с полной шириной 10 нм на полумаксимальной и центральной длинах волн в B (450 нм), G (530 нм), R (670 и 700 нм). нм), край R (740 нм) и ближний инфракрасный диапазон (NIR, 780 нм). Эти полосовые фильтры были выбраны для видимого и ближнего ИК-диапазонов с учетом известных биофизических показателей, разработанных для мониторинга растительности [24].Запуск изображения активируется БПЛА в соответствии с запрограммированным маршрутом полета. В момент каждой съемки бортовой компьютер записывает метку времени, местоположение по GPS, высоту полета и основные оси транспортного средства (тангаж, крен и курс).
, время интегрирования). Каждый канал имеет фокусное расстояние 9,6 мм и 1,3-мегапиксельный (1280×1024 пикселей) CMOS-сенсор, который сохраняет изображения на компактной флэш-карте CF. Изображения могут быть получены с 8-битным или 10-битным радиометрическим разрешением. Камера оснащена настраиваемыми пользователем полосовыми фильтрами (Andover Corporation, Salem, NH, USA) с полной шириной 10 нм на полумаксимальной и центральной длинах волн в B (450 нм), G (530 нм), R (670 и 700 нм). нм), край R (740 нм) и ближний инфракрасный диапазон (NIR, 780 нм). Эти полосовые фильтры были выбраны для видимого и ближнего ИК-диапазонов с учетом известных биофизических показателей, разработанных для мониторинга растительности [24].Запуск изображения активируется БПЛА в соответствии с запрограммированным маршрутом полета. В момент каждой съемки бортовой компьютер записывает метку времени, местоположение по GPS, высоту полета и основные оси транспортного средства (тангаж, крен и курс).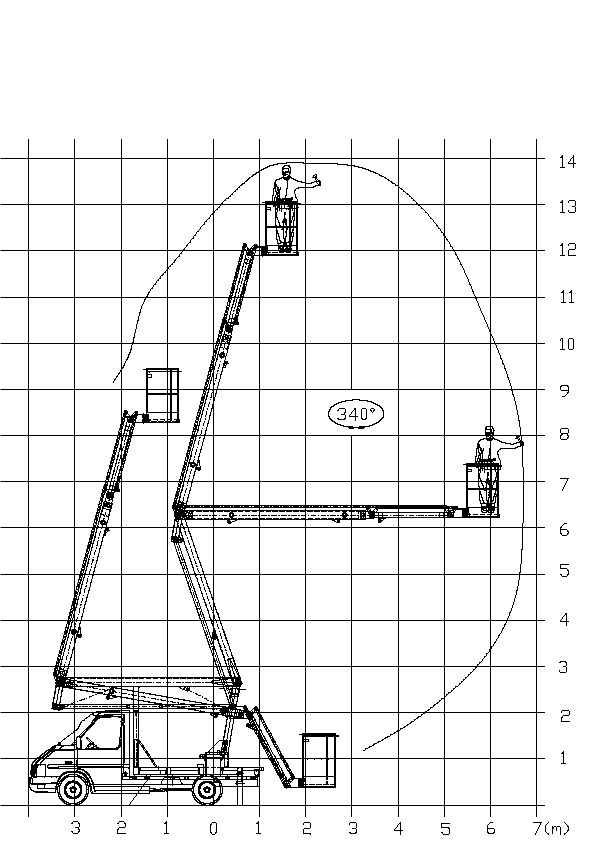 527N, 5.302W, датум WGS84). Полеты были санкционированы письменным соглашением между владельцами фермы и нашей исследовательской группой.Мы выбрали подсолнечник, потому что это основная масличная культура, выращиваемая в Испании, с общей площадью 850 000 га в 2012 г. [25], а также потому, что операции по борьбе с сорняками (химические или физические) с использованием крупной сельскохозяйственной техники составляют значительную часть производства. затраты, создают различные агрономические проблемы (уплотнение и эрозия почвы) и представляют риск загрязнения окружающей среды. Семена подсолнечника были посеяны в конце марта 2012 г. по 6 кг/га -1 рядами на расстоянии 0,7 м друг от друга.Набор аэрофотоснимков был получен 15 мая года года, как раз в то время, когда для этой культуры рекомендуются послевсходовые гербициды или другие методы борьбы. Несколько раз периодически выезжали на поле после посева, чтобы следить за ростом урожая и появлением сорняков и, наконец, чтобы выбрать лучший момент для получения набора дистанционных снимков.
527N, 5.302W, датум WGS84). Полеты были санкционированы письменным соглашением между владельцами фермы и нашей исследовательской группой.Мы выбрали подсолнечник, потому что это основная масличная культура, выращиваемая в Испании, с общей площадью 850 000 га в 2012 г. [25], а также потому, что операции по борьбе с сорняками (химические или физические) с использованием крупной сельскохозяйственной техники составляют значительную часть производства. затраты, создают различные агрономические проблемы (уплотнение и эрозия почвы) и представляют риск загрязнения окружающей среды. Семена подсолнечника были посеяны в конце марта 2012 г. по 6 кг/га -1 рядами на расстоянии 0,7 м друг от друга.Набор аэрофотоснимков был получен 15 мая года года, как раз в то время, когда для этой культуры рекомендуются послевсходовые гербициды или другие методы борьбы. Несколько раз периодически выезжали на поле после посева, чтобы следить за ростом урожая и появлением сорняков и, наконец, чтобы выбрать лучший момент для получения набора дистанционных снимков. Подсолнечник находился на стадии 4–6 раскрывшихся листьев. Сорные растения имели такой же размер или, в некоторых случаях, были меньше, чем культурные растения (рис. 1).
Подсолнечник находился на стадии 4–6 раскрывшихся листьев. Сорные растения имели такой же размер или, в некоторых случаях, были меньше, чем культурные растения (рис. 1). В ходе полетов БПЛА для калибровки спектральных данных в центре поля также размещалась стандартная панель из сульфата бария (Labsphere Inc., Норт-Саттон, Нью-Хэмпшир, США) размером 1×1 м (рис. 2В). .
В ходе полетов БПЛА для калибровки спектральных данных в центре поля также размещалась стандартная панель из сульфата бария (Labsphere Inc., Норт-Саттон, Нью-Хэмпшир, США) размером 1×1 м (рис. 2В). . Как только эта информация и высота полета были введены в модуль WPE, он автоматически сгенерировал маршрут полета и оценил продолжительность полета в соответствии с общим количеством запланированных изображений (рис. 3). Файл маршрута экспортировался на встроенную в БПЛА карту памяти по стандартному последовательному каналу.
Как только эта информация и высота полета были введены в модуль WPE, он автоматически сгенерировал маршрут полета и оценил продолжительность полета в соответствии с общим количеством запланированных изображений (рис. 3). Файл маршрута экспортировался на встроенную в БПЛА карту памяти по стандартному последовательному каналу. Во время полета оператор наземной станции просматривает данные телеметрии БПЛА с помощью декодера нисходящей линии связи, еще одного компонента программного обеспечения MDC (рис. 4). Эта программа дает информацию о: 1) времени работы БПЛА, 2) текущем времени полета, 3) расстоянии от точки взлета до БПЛА, 4) качестве сигнала дистанционного управления, принимаемого БПЛА, 5) качестве канала связи, 6) состояние батареи и 7) точность GPS.
Во время полета оператор наземной станции просматривает данные телеметрии БПЛА с помощью декодера нисходящей линии связи, еще одного компонента программного обеспечения MDC (рис. 4). Эта программа дает информацию о: 1) времени работы БПЛА, 2) текущем времени полета, 3) расстоянии от точки взлета до БПЛА, 4) качестве сигнала дистанционного управления, принимаемого БПЛА, 5) качестве канала связи, 6) состояние батареи и 7) точность GPS.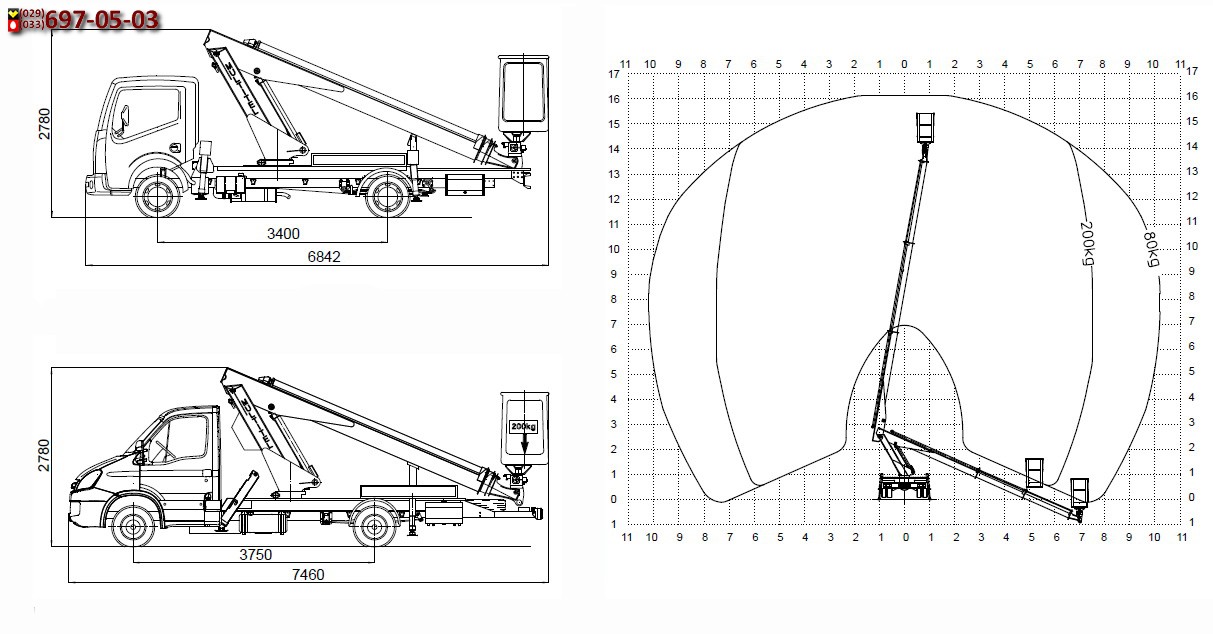
 Эта камера снимает изображения каждого канала в необработанном формате и сохраняет их отдельно на шести отдельных CF-картах, встроенных в камеру. Таким образом, процесс выравнивания необходим для группировки шести изображений, сделанных в каждой путевой точке. Программное обеспечение Tetracam PixelWrench 2 (PW2) (Tetracam Inc., Chatsworth, CA, USA), поставляемое с мультиспектральной камерой, использовалось для выполнения процесса совмещения. Программное обеспечение PW2 предоставляет файл регистрации между диапазонами, который содержит информацию о преобразовании, вращении и масштабировании между ведущим и подчиненным каналами.Были протестированы два различных варианта: 1) базовая конфигурация программного обеспечения PW2, применяемая Laliberte et al. (2011) [26] и 2) расширенная конфигурация PW2, которая включает в себя новейший оптический вычислитель поля зрения (FOV), который вычисляет дополнительные смещения для компенсации выравнивания на более близких расстояниях [27]. Качество процесса совмещения оценивалось с помощью данных панели «спектралон®», зафиксированных на снимках с высоты 30 м.
Эта камера снимает изображения каждого канала в необработанном формате и сохраняет их отдельно на шести отдельных CF-картах, встроенных в камеру. Таким образом, процесс выравнивания необходим для группировки шести изображений, сделанных в каждой путевой точке. Программное обеспечение Tetracam PixelWrench 2 (PW2) (Tetracam Inc., Chatsworth, CA, USA), поставляемое с мультиспектральной камерой, использовалось для выполнения процесса совмещения. Программное обеспечение PW2 предоставляет файл регистрации между диапазонами, который содержит информацию о преобразовании, вращении и масштабировании между ведущим и подчиненным каналами.Были протестированы два различных варианта: 1) базовая конфигурация программного обеспечения PW2, применяемая Laliberte et al. (2011) [26] и 2) расширенная конфигурация PW2, которая включает в себя новейший оптический вычислитель поля зрения (FOV), который вычисляет дополнительные смещения для компенсации выравнивания на более близких расстояниях [27]. Качество процесса совмещения оценивалось с помощью данных панели «спектралон®», зафиксированных на снимках с высоты 30 м. Пространственные профили были взяты по эталонной панели для каждого метода и сопоставлены с невыровненным изображением.Пространственные профили состояли из графиков, представляющих спектральные значения для каждой полосы вдоль линии длиной 45 пикселей, нарисованной на многоканальных изображениях с использованием программного обеспечения для обработки изображений ENVI (Research System Inc., Боулдер, Колорадо, США).
Пространственные профили были взяты по эталонной панели для каждого метода и сопоставлены с невыровненным изображением.Пространственные профили состояли из графиков, представляющих спектральные значения для каждой полосы вдоль линии длиной 45 пикселей, нарисованной на многоканальных изображениях с использованием программного обеспечения для обработки изображений ENVI (Research System Inc., Боулдер, Колорадо, США). Чтобы определить ограничения каждого датчика в отношении обеих фаз, были извлечены спектральные значения трех покровов, присутствующих в поле (голая почва, урожай и сорняки).Эти спектральные значения были собраны в 15 случайно выбранных областях отбора проб для каждого вида использования почвы из изображений, полученных во время всех полетов (т.е. оба датчика на высотах 30, 60 и 100 м).
Чтобы определить ограничения каждого датчика в отношении обеих фаз, были извлечены спектральные значения трех покровов, присутствующих в поле (голая почва, урожай и сорняки).Эти спектральные значения были собраны в 15 случайно выбранных областях отбора проб для каждого вида использования почвы из изображений, полученных во время всех полетов (т.е. оба датчика на высотах 30, 60 и 100 м). Для проведения статистического анализа использовалось программное обеспечение JMP (SAS, Кэри, Северная Каролина, США).(4)
Для проведения статистического анализа использовалось программное обеспечение JMP (SAS, Кэри, Северная Каролина, США).(4) Более широкие гистограммы (большее σ) вызовут большее перекрытие и меньшую разделимость, чем узкие гистограммы (меньшее σ) при той же разнице в средних.
Более широкие гистограммы (большее σ) вызовут большее перекрытие и меньшую разделимость, чем узкие гистограммы (меньшее σ) при той же разнице в средних.
 5C). На самом деле эти результаты кажутся очень похожими на результаты, полученные с помощью метода LMWT. Хорошее выравнивание всех отдельных каналов имеет решающее значение для последующего анализа изображения, особенно когда извлекаются спектральные значения различных объектов изображения. Объекты растительности, присутствующие в сценарии сорняков и посевов в начале сезона, очень малы, поэтому плохое выравнивание может включать пиксели, не принадлежащие интересующим объектам, что резко снижает эффективность анализа и классификации изображений.
5C). На самом деле эти результаты кажутся очень похожими на результаты, полученные с помощью метода LMWT. Хорошее выравнивание всех отдельных каналов имеет решающее значение для последующего анализа изображения, особенно когда извлекаются спектральные значения различных объектов изображения. Объекты растительности, присутствующие в сценарии сорняков и посевов в начале сезона, очень малы, поэтому плохое выравнивание может включать пиксели, не принадлежащие интересующим объектам, что резко снижает эффективность анализа и классификации изображений. Важной задачей перед анализом изображений было объединение всех этих отдельных и перекрывающихся изображений путем применения двух последовательных процессов ортотрансформирования и создания мозаики.В работе использовалась программа Agisoft Photoscan Professional Edition (ООО «Агисофт», Санкт-Петербург, Россия). На первом этапе программа запрашивает географическое положение и главные оси (крен, тангаж и рыскание) транспортного средства на каждом полученном изображении. Далее программа автоматически выравнивает фотографии. Наконец, некоторые координаты ATT добавляются для назначения географических координат изображению. Затем программное обеспечение автоматически выполняет ортотрансформирование и создание мозаики набора изображений в единое изображение всего экспериментального поля (рис. 6).Полученная орто-мозаика показывает высококачественную метрику ландшафта и точное сопоставление рядов культур между последовательными изображениями, что гарантирует хорошую производительность последующей классификации изображений.
Важной задачей перед анализом изображений было объединение всех этих отдельных и перекрывающихся изображений путем применения двух последовательных процессов ортотрансформирования и создания мозаики.В работе использовалась программа Agisoft Photoscan Professional Edition (ООО «Агисофт», Санкт-Петербург, Россия). На первом этапе программа запрашивает географическое положение и главные оси (крен, тангаж и рыскание) транспортного средства на каждом полученном изображении. Далее программа автоматически выравнивает фотографии. Наконец, некоторые координаты ATT добавляются для назначения географических координат изображению. Затем программное обеспечение автоматически выполняет ортотрансформирование и создание мозаики набора изображений в единое изображение всего экспериментального поля (рис. 6).Полученная орто-мозаика показывает высококачественную метрику ландшафта и точное сопоставление рядов культур между последовательными изображениями, что гарантирует хорошую производительность последующей классификации изображений.

 Исходя из этого перекрытия и размера сенсора камеры, модуль WPE рассчитал количество изображений, необходимых для захвата всего экспериментального поля, и, следовательно, время, необходимое БПЛА для их сбора на каждой высоте полета (рис. 9). Количество снимков на га и продолжительность полета были больше при использовании мультиспектральной камеры, уменьшаясь со 117 снимков га −1 и 27 мин на высоте 30 м до 12 снимков га −1 и 6 мин на высоте 100 м. высота.Для фотокамеры RGB эти переменные варьировались от 42 изображений га -1 и 12 минут на высоте 30 м до 6 изображений га -1 5 минут на высоте 100 м. Очень большое количество изображений может ограничить процесс создания мозаики, потому что количество изображений на гектар сильно увеличивается на очень малых высотах, следуя асимптотической кривой. Кроме того, время работы ограничено временем работы батареи БПЛА. Все эти переменные сильно влияют на конфигурацию оптимальной полетной миссии для картирования сорняков в начале сезона, которая включает два основных условия: 1) получение дистанционных изображений с высоким пространственным разрешением, чтобы гарантировать различение сорняков, и 2) минимизация время работы и количество изображений для уменьшения ограничения продолжительности полета и мозаичности изображения соответственно.
Исходя из этого перекрытия и размера сенсора камеры, модуль WPE рассчитал количество изображений, необходимых для захвата всего экспериментального поля, и, следовательно, время, необходимое БПЛА для их сбора на каждой высоте полета (рис. 9). Количество снимков на га и продолжительность полета были больше при использовании мультиспектральной камеры, уменьшаясь со 117 снимков га −1 и 27 мин на высоте 30 м до 12 снимков га −1 и 6 мин на высоте 100 м. высота.Для фотокамеры RGB эти переменные варьировались от 42 изображений га -1 и 12 минут на высоте 30 м до 6 изображений га -1 5 минут на высоте 100 м. Очень большое количество изображений может ограничить процесс создания мозаики, потому что количество изображений на гектар сильно увеличивается на очень малых высотах, следуя асимптотической кривой. Кроме того, время работы ограничено временем работы батареи БПЛА. Все эти переменные сильно влияют на конфигурацию оптимальной полетной миссии для картирования сорняков в начале сезона, которая включает два основных условия: 1) получение дистанционных изображений с высоким пространственным разрешением, чтобы гарантировать различение сорняков, и 2) минимизация время работы и количество изображений для уменьшения ограничения продолжительности полета и мозаичности изображения соответственно.
 Все индексы показали значительные различия между растительностью и почвой, и в большинстве случаев М-статистика показала достаточно хорошие результаты, превышающие 2, что является индексом NDVI, который обеспечивает наибольшую спектральную разделимость на трех высотах полета. Это связано с тем, что NDVI подчеркивает спектральную характеристику полосы NIR, которая характеризует силу растительности, и менее чувствительна к фоновым эффектам почвы, чем два других индекса. Величина М-статистики, обычно превышающая 2,5 (за исключением ExG на высоте 30 м и 60 м и мультиспектральной камеры), дает удовлетворительные результаты для высокой устойчивости распознавания растительности во всех сценариях.Кауфман и Ремер (1994) [32] сообщили о значениях М в диапазоне от 1,5 до 0,5 для картирования густой растительности в лесах, тогда как Смит и др. . (2007) [33] получили M значений от 0,24 до 2,18 для картирования выгоревших территорий. Согласно нашим выводам, M достигли гораздо более высокого значения ( M = 8,9 для мультиспектральной камеры и индекса NDVI), что свидетельствует о надежной разделимости классов.
Все индексы показали значительные различия между растительностью и почвой, и в большинстве случаев М-статистика показала достаточно хорошие результаты, превышающие 2, что является индексом NDVI, который обеспечивает наибольшую спектральную разделимость на трех высотах полета. Это связано с тем, что NDVI подчеркивает спектральную характеристику полосы NIR, которая характеризует силу растительности, и менее чувствительна к фоновым эффектам почвы, чем два других индекса. Величина М-статистики, обычно превышающая 2,5 (за исключением ExG на высоте 30 м и 60 м и мультиспектральной камеры), дает удовлетворительные результаты для высокой устойчивости распознавания растительности во всех сценариях.Кауфман и Ремер (1994) [32] сообщили о значениях М в диапазоне от 1,5 до 0,5 для картирования густой растительности в лесах, тогда как Смит и др. . (2007) [33] получили M значений от 0,24 до 2,18 для картирования выгоревших территорий. Согласно нашим выводам, M достигли гораздо более высокого значения ( M = 8,9 для мультиспектральной камеры и индекса NDVI), что свидетельствует о надежной разделимости классов. NDVI может быть лучшим индексом для выполнения первой фазы предложенной стратегии классификации, хотя NGRDI и ExG также продемонстрировали в целом хорошую способность различать растительный покров, что было бы очень актуально, поскольку камера RGB намного дешевле и проще в использовании, чем камера RGB. мультиспектральная камера.
NDVI может быть лучшим индексом для выполнения первой фазы предложенной стратегии классификации, хотя NGRDI и ExG также продемонстрировали в целом хорошую способность различать растительный покров, что было бы очень актуально, поскольку камера RGB намного дешевле и проще в использовании, чем камера RGB. мультиспектральная камера. Однако даже на этой высоте значение M-статистики значительно ниже, чем полученное для ExG и мультиспектральной камеры ( M = 3,02). Предварительный вывод может заключаться в том, что камера RGB способна различать сорняки и урожай, используя изображения ExG на высоте 30 м. Тем не менее, один из ключевых вопросов, который необходимо прояснить на данном этапе, состоит в том, чтобы определить, является ли M = 1.61 обеспечивает достаточную надежность для картирования сорняков и сельскохозяйственных культур. Это сомнение можно прояснить, обратившись к Рисунку 10, на котором показаны значительные спектральные различия между почвой, сорняками и сельскохозяйственными культурами во всех сценариях. Обратите внимание, что спектральные различия между почвой, сорняками и посевами на высоте 30 м для камеры ExG и RGB явно значительны; однако диапазон стандартного отклонения (см. точки на рис. 10) сорняков и сельскохозяйственных культур приводит к перекрытию, что может привести к недостаточному различению сорняков и сельскохозяйственных культур.
Однако даже на этой высоте значение M-статистики значительно ниже, чем полученное для ExG и мультиспектральной камеры ( M = 3,02). Предварительный вывод может заключаться в том, что камера RGB способна различать сорняки и урожай, используя изображения ExG на высоте 30 м. Тем не менее, один из ключевых вопросов, который необходимо прояснить на данном этапе, состоит в том, чтобы определить, является ли M = 1.61 обеспечивает достаточную надежность для картирования сорняков и сельскохозяйственных культур. Это сомнение можно прояснить, обратившись к Рисунку 10, на котором показаны значительные спектральные различия между почвой, сорняками и сельскохозяйственными культурами во всех сценариях. Обратите внимание, что спектральные различия между почвой, сорняками и посевами на высоте 30 м для камеры ExG и RGB явно значительны; однако диапазон стандартного отклонения (см. точки на рис. 10) сорняков и сельскохозяйственных культур приводит к перекрытию, что может привести к недостаточному различению сорняков и сельскохозяйственных культур. Таким образом, Таблица 3 предлагает общий обзор разделения между растительностью и почвой, сорняками и сельскохозяйственными культурами; однако эти результаты необходимо тщательно изучить, соблюдая диапазоны минимальных и максимальных спектральных значений каждого VI (таблица 3) и диапазоны стандартного отклонения (рисунок 10).
Таким образом, Таблица 3 предлагает общий обзор разделения между растительностью и почвой, сорняками и сельскохозяйственными культурами; однако эти результаты необходимо тщательно изучить, соблюдая диапазоны минимальных и максимальных спектральных значений каждого VI (таблица 3) и диапазоны стандартного отклонения (рисунок 10). Например, на высоте 60 м NGRDI показал значительную спектральную разницу для сорняков и сельскохозяйственных культур; однако М-статистика была ниже 1 ( M = 0.81). Это указывает на то, что, помимо значительной спектральной разницы, ожидается плохое разделение между пикселями сорняков и сельскохозяйственных культур. Это можно ясно оценить на рисунке 10, где диапазон стандартного отклонения между сорняками и сельскохозяйственными культурами включает перекрытие значений, и это является причиной того, что при значительной спектральной дискриминации этого недостаточно для достижения удовлетворительной разделимости ( M выше). чем 1).
Например, на высоте 60 м NGRDI показал значительную спектральную разницу для сорняков и сельскохозяйственных культур; однако М-статистика была ниже 1 ( M = 0.81). Это указывает на то, что, помимо значительной спектральной разницы, ожидается плохое разделение между пикселями сорняков и сельскохозяйственных культур. Это можно ясно оценить на рисунке 10, где диапазон стандартного отклонения между сорняками и сельскохозяйственными культурами включает перекрытие значений, и это является причиной того, что при значительной спектральной дискриминации этого недостаточно для достижения удовлетворительной разделимости ( M выше). чем 1). м высота.Единственным индексом, изученным с использованием диапазона NIR, был NDVI, и он не мог отличить урожай от сорняков на любой высоте полета; фактически NDVI показал самые низкие значения М-статистики среди индексов, рассчитанных по мультиспектральной камере.
м высота.Единственным индексом, изученным с использованием диапазона NIR, был NDVI, и он не мог отличить урожай от сорняков на любой высоте полета; фактически NDVI показал самые низкие значения М-статистики среди индексов, рассчитанных по мультиспектральной камере. Методология OBIA идентифицирует пространственно и спектрально однородные единицы, называемые объектами , созданными путем группирования смежных пикселей в соответствии с процедурой, известной как сегментация.После этого используются многочисленные особенности локализации, текстуры, близости и иерархических отношений, которые резко повышают успешность классификации изображений [36], [37]. На посевных полях на ранней стадии относительное положение растений в рядах посевов, а не их спектральная информация, может быть ключевым признаком их различения. Следовательно, каждое растение, не расположенное в ряду посева, можно считать сорняком. Таким образом, согласно нашим результатам, можно разработать стратегию надежной классификации изображений БПЛА, включающую два этапа: 1) различение растительности (сорняков и сельскохозяйственных культур) от голой почвы с использованием спектральной информации и 2) различение сорняков от рядов посевов с использованием OBIA. методология.Поэтому будущие исследования будут иметь важное значение для определения потенциала методов OBIA для распознавания и картирования сорняков и сельскохозяйственных культур с использованием изображений БПЛА на больших высотах полета, когда сорняки и сельскохозяйственные культуры находятся на ранних фенологических стадиях.
Методология OBIA идентифицирует пространственно и спектрально однородные единицы, называемые объектами , созданными путем группирования смежных пикселей в соответствии с процедурой, известной как сегментация.После этого используются многочисленные особенности локализации, текстуры, близости и иерархических отношений, которые резко повышают успешность классификации изображений [36], [37]. На посевных полях на ранней стадии относительное положение растений в рядах посевов, а не их спектральная информация, может быть ключевым признаком их различения. Следовательно, каждое растение, не расположенное в ряду посева, можно считать сорняком. Таким образом, согласно нашим результатам, можно разработать стратегию надежной классификации изображений БПЛА, включающую два этапа: 1) различение растительности (сорняков и сельскохозяйственных культур) от голой почвы с использованием спектральной информации и 2) различение сорняков от рядов посевов с использованием OBIA. методология.Поэтому будущие исследования будут иметь важное значение для определения потенциала методов OBIA для распознавания и картирования сорняков и сельскохозяйственных культур с использованием изображений БПЛА на больших высотах полета, когда сорняки и сельскохозяйственные культуры находятся на ранних фенологических стадиях. Наши недавние исследования с использованием методологии OBIA показали улучшение использования спутниковых изображений для картирования сельскохозяйственных культур [38] [37] или сорняков на поздних фенологических стадиях озимой пшеницы [12]. Наша гипотеза для дальнейшей работы основана на идее о том, что методология OBIA доказала свою эффективность как мощный и гибкий алгоритм, который можно адаптировать в ряде сельскохозяйственных ситуаций.Основная цель будет состоять в том, чтобы различить и нанести на карту ранние сорняки, чтобы улучшить процесс принятия решений для разработки сезонного ESSWM на больших высотах с использованием индекса RGB и ExG по сравнению с многоспектральной камерой и анализом изображений на основе пикселей. Это позволило бы уменьшить количество снимков БПЛА, улучшить характеристики БПЛА (дальность полета и эффективность энергоснабжения) и процесс создания мозаики. Этот подход может быть более выгодным методом для картирования раннего заражения сорняками из-за охвата большей площади посевов и того, что камеры RGB дешевле и экономически более доступны, чем мультиспектральные камеры.
Наши недавние исследования с использованием методологии OBIA показали улучшение использования спутниковых изображений для картирования сельскохозяйственных культур [38] [37] или сорняков на поздних фенологических стадиях озимой пшеницы [12]. Наша гипотеза для дальнейшей работы основана на идее о том, что методология OBIA доказала свою эффективность как мощный и гибкий алгоритм, который можно адаптировать в ряде сельскохозяйственных ситуаций.Основная цель будет состоять в том, чтобы различить и нанести на карту ранние сорняки, чтобы улучшить процесс принятия решений для разработки сезонного ESSWM на больших высотах с использованием индекса RGB и ExG по сравнению с многоспектральной камерой и анализом изображений на основе пикселей. Это позволило бы уменьшить количество снимков БПЛА, улучшить характеристики БПЛА (дальность полета и эффективность энергоснабжения) и процесс создания мозаики. Этот подход может быть более выгодным методом для картирования раннего заражения сорняками из-за охвата большей площади посевов и того, что камеры RGB дешевле и экономически более доступны, чем мультиспектральные камеры. Учитывая, что разработка БПЛА требует существенных инвестиций, возможность использования RGB-камер позволит значительно снизить дополнительные затраты.
Учитывая, что разработка БПЛА требует существенных инвестиций, возможность использования RGB-камер позволит значительно снизить дополнительные затраты.
 Была получена большая спектральная разделимость между растительностью и обнаженной почвой с индексом NDVI, что предполагает использование мультиспектральных изображений для более надежного различения. В этом случае стратегия улучшения мозаичного изображения и классификации может заключаться в реализации методологии OBIA для включения признаков локализации и близости между сорняками и культурными растениями.Согласование между спектральным и пространственным разрешением необходимо для оптимизации полетной миссии в соответствии с размером более мелких объектов, которые необходимо различить (сорняки или участки сорняков).
Была получена большая спектральная разделимость между растительностью и обнаженной почвой с индексом NDVI, что предполагает использование мультиспектральных изображений для более надежного различения. В этом случае стратегия улучшения мозаичного изображения и классификации может заключаться в реализации методологии OBIA для включения признаков локализации и близости между сорняками и культурными растениями.Согласование между спектральным и пространственным разрешением необходимо для оптимизации полетной миссии в соответствии с размером более мелких объектов, которые необходимо различить (сорняки или участки сорняков).
 Сенсоры (Базель) 8(5): 3557–3585.
Сенсоры (Базель) 8(5): 3557–3585. , Коэн Ю. (2010) Картирование водного стресса сельскохозяйственных культур для орошения на конкретных участках с помощью тепловизионных изображений и искусственных эталонных поверхностей. Precis Agric 11 (2): 148–162.
, Коэн Ю. (2010) Картирование водного стресса сельскохозяйственных культур для орошения на конкретных участках с помощью тепловизионных изображений и искусственных эталонных поверхностей. Precis Agric 11 (2): 148–162. М., Лопес-Гранадос Ф., Хурадо-Экспосито М., Гарсия-Торрес Л. (2007) Картирование пятен Ridolfia segetum в посевах подсолнечника с использованием дистанционного зондирования.Виид Рез 47: 164–172.
М., Лопес-Гранадос Ф., Хурадо-Экспосито М., Гарсия-Торрес Л. (2007) Картирование пятен Ridolfia segetum в посевах подсолнечника с использованием дистанционного зондирования.Виид Рез 47: 164–172. Precis Agric 5 (5): 477–508.
Precis Agric 5 (5): 477–508. Фотограмма Eng Rem S 76: 661–672.
Фотограмма Eng Rem S 76: 661–672.
 Сделки ASAE. 38(1): 259–269.
Сделки ASAE. 38(1): 259–269. С., Ранго А. (2009)Текстура и масштаб в объектно-ориентированном анализе изображений беспилотных летательных аппаратов (БПЛА) с субдециметровым разрешением. IEEE T Geosci Remote 47: 761–770.
С., Ранго А. (2009)Текстура и масштаб в объектно-ориентированном анализе изображений беспилотных летательных аппаратов (БПЛА) с субдециметровым разрешением. IEEE T Geosci Remote 47: 761–770. Предварительная обработка изображений
Предварительная обработка изображений Эти ореолы и шумы все еще были различимы на изображении, совмещенном с использованием базовой конфигурации программного обеспечения PW2 (), хотя они были меньше, чем на изображении без совмещения.Эти результаты аналогичны результатам, полученным Laliberte et al. (2011) [26], который сообщил о плохих результатах совмещения с использованием программного обеспечения PW2 с изображениями mini-MCA. Чтобы решить эту проблему, они разработали метод локального средневзвешенного преобразования (LMWT) и получили удовлетворительное выравнивание. Тем не менее, последняя версия программного обеспечения PW2, выпущенная в 2012 году и включающая в себя оптический калькулятор FOV, выполнила хорошую настройку и позволила устранить ореолы и значительно уменьшить фоновый шум ().На самом деле эти результаты кажутся очень похожими на результаты, полученные с помощью метода LMWT. Хорошее выравнивание всех отдельных каналов имеет решающее значение для последующего анализа изображения, особенно когда извлекаются спектральные значения различных объектов изображения.
Эти ореолы и шумы все еще были различимы на изображении, совмещенном с использованием базовой конфигурации программного обеспечения PW2 (), хотя они были меньше, чем на изображении без совмещения.Эти результаты аналогичны результатам, полученным Laliberte et al. (2011) [26], который сообщил о плохих результатах совмещения с использованием программного обеспечения PW2 с изображениями mini-MCA. Чтобы решить эту проблему, они разработали метод локального средневзвешенного преобразования (LMWT) и получили удовлетворительное выравнивание. Тем не менее, последняя версия программного обеспечения PW2, выпущенная в 2012 году и включающая в себя оптический калькулятор FOV, выполнила хорошую настройку и позволила устранить ореолы и значительно уменьшить фоновый шум ().На самом деле эти результаты кажутся очень похожими на результаты, полученные с помощью метода LMWT. Хорошее выравнивание всех отдельных каналов имеет решающее значение для последующего анализа изображения, особенно когда извлекаются спектральные значения различных объектов изображения. Объекты растительности, присутствующие в сценарии сорняков и посевов в начале сезона, очень малы, поэтому плохое выравнивание может включать пиксели, не принадлежащие интересующим объектам, что резко снижает эффективность анализа и классификации изображений.
Объекты растительности, присутствующие в сценарии сорняков и посевов в начале сезона, очень малы, поэтому плохое выравнивание может включать пиксели, не принадлежащие интересующим объектам, что резко снижает эффективность анализа и классификации изображений. Размер пикселя изображения был прямо пропорционален высоте полета. Фотокамера RGB снимала изображения с размером пикселя 1,14 см и 3,81 см, а мультиспектральная камера снимала изображения с размером пикселя 1,63 см и 5,42 см на высоте полета 30 и 100 м соответственно (). На этих высотах площадь, покрываемая каждым изображением неподвижной RGB-камеры, увеличилась с 0,16 га (46×35 м) до 1,76 га (153×115 м), а мультиспектральной камеры — с 0,04 (21×17 м) до 0,38 га. (69×55 м) соответственно.Различия между обоими типами изображений были обусловлены техническими характеристиками камер (). Фокусное расстояние камеры влияет как на размер пикселя, так и на площадь, покрываемую каждым изображением, в то время как размер сенсора камеры влияет только на размер пикселя изображения.
Размер пикселя изображения был прямо пропорционален высоте полета. Фотокамера RGB снимала изображения с размером пикселя 1,14 см и 3,81 см, а мультиспектральная камера снимала изображения с размером пикселя 1,63 см и 5,42 см на высоте полета 30 и 100 м соответственно (). На этих высотах площадь, покрываемая каждым изображением неподвижной RGB-камеры, увеличилась с 0,16 га (46×35 м) до 1,76 га (153×115 м), а мультиспектральной камеры — с 0,04 (21×17 м) до 0,38 га. (69×55 м) соответственно.Различия между обоими типами изображений были обусловлены техническими характеристиками камер (). Фокусное расстояние камеры влияет как на размер пикселя, так и на площадь, покрываемую каждым изображением, в то время как размер сенсора камеры влияет только на размер пикселя изображения.
 Исходя из этого перекрытия и размера сенсора камеры, модуль WPE рассчитал количество изображений, необходимых для захвата всего экспериментального поля, и, следовательно, время, затрачиваемое БПЛА на их сбор на каждой высоте полета (). Количество снимков на га и продолжительность полета были больше при использовании мультиспектральной камеры, уменьшаясь со 117 снимков га −1 и 27 мин на высоте 30 м до 12 снимков га −1 и 6 мин на высоте 100 м. высота.Для фотокамеры RGB эти переменные варьировались от 42 изображений га -1 и 12 минут на высоте 30 м до 6 изображений га -1 5 минут на высоте 100 м. Очень большое количество изображений может ограничить процесс создания мозаики, потому что количество изображений на гектар сильно увеличивается на очень малых высотах, следуя асимптотической кривой. Кроме того, время работы ограничено временем работы батареи БПЛА. Все эти переменные сильно влияют на конфигурацию оптимальной полетной миссии для картирования сорняков в начале сезона, которая включает два основных условия: 1) получение дистанционных изображений с высоким пространственным разрешением, чтобы гарантировать различение сорняков, и 2) минимизация время работы и количество изображений для уменьшения ограничения продолжительности полета и мозаичности изображения соответственно.
Исходя из этого перекрытия и размера сенсора камеры, модуль WPE рассчитал количество изображений, необходимых для захвата всего экспериментального поля, и, следовательно, время, затрачиваемое БПЛА на их сбор на каждой высоте полета (). Количество снимков на га и продолжительность полета были больше при использовании мультиспектральной камеры, уменьшаясь со 117 снимков га −1 и 27 мин на высоте 30 м до 12 снимков га −1 и 6 мин на высоте 100 м. высота.Для фотокамеры RGB эти переменные варьировались от 42 изображений га -1 и 12 минут на высоте 30 м до 6 изображений га -1 5 минут на высоте 100 м. Очень большое количество изображений может ограничить процесс создания мозаики, потому что количество изображений на гектар сильно увеличивается на очень малых высотах, следуя асимптотической кривой. Кроме того, время работы ограничено временем работы батареи БПЛА. Все эти переменные сильно влияют на конфигурацию оптимальной полетной миссии для картирования сорняков в начале сезона, которая включает два основных условия: 1) получение дистанционных изображений с высоким пространственным разрешением, чтобы гарантировать различение сорняков, и 2) минимизация время работы и количество изображений для уменьшения ограничения продолжительности полета и мозаичности изображения соответственно.
| 0 | Голая дискриминация почвы | Cross против Cross против Wrined Carrimination | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Растительность | Голая почва | LSD > F) | M (B) | Урожай | Weed | LSD Test (Проб> Ф) | м (b) | 0|||||||||||||||||||||||||||||||||||||||||||||||||||||
| Высота полета | Тип камеры | VIS A) | MAX | MIN | Среднее | ± SD | MAX | мин | Среднее | ± SD | Max | мин | Среднее | ± SD | Max | Мин.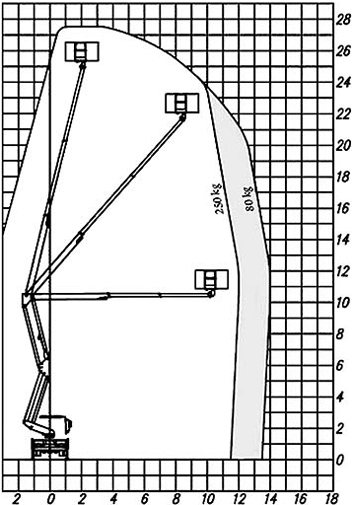 | Среднее | ±SD | ||||||||||||||||||||||||||||||||||||||||||
| 30-м | RGB | NGR11 | -0.02 | 0.04 | ± 0.04 | ± 0,03 | -0.08 | -0.11 | -0.11 | -0.09 | – 0,01 | <0,01 | 3.61 | 0,09 | 0,00 | 0,05 | ± 0,02 | 0. 11 11 | -0.02 | 0.03 | ± 0.03 | ± 0.03 | 0.10 | 0.32 | ||||||||||||||||||||||||||||||||||||
| Exg | 0.34 | 0.10 | 0.21 | ± 0,21 | 0.02 | -0,01 0,00 | ± 0.01 | <0,01 | 2,93 | 0,34 | 0,20 0,27 | ± 0,04 | 0,20 | 0,10 | 0,16 | ± 0. 01 01 | <0,01 | 1.61 | ||||||||||||||||||||||||||||||||||||||||||
| NDVI | NDVI | 0.73 | 0.45 | 0.58 | ± 0,07 | -0,15 | -0,19 | -0,16 | -0.16 | ± 0.01 | <0,01 | 8,90 | 0,73 | 0,52 | 0,61 | ± 0,06 | 0,68 | 0,45 | 0,55 | ± 0,07 | 0,03 | 0,42 | ||||||||||||||||||||||||||||||||||||||
| NGRDI | 0. 35 35 | -0.04 | 0.14 | 0.14 | ± 0.12 | -0.20 | -0.27 | -0.27 | -0.23 | ± 0,02 | <0,01 | <0,01 | 2.75 | 0.35 | 0.15 | 0,24 ± 0,06 0,17 | -0,04 0,05 | ± 0,06 | <0,01 | 1,59 | ||||||||||||||||||||||||||||||||||||||||
| ExG 0,18 | -0,01 0,08 | ± 0,07 | -0. 05 05 | -0.09 | -0.06 | -0.06 | ± 0,01 | <0,01 | <0,01 | 1.94 | 0.18 | 0.11 | 0.15 | ± 0,02 | -0 0,06 | -0.01 | 0,02 | ± 0,02 | <0,01 | 3.02 | 30258 | 60265 | RGB | Ngrdi | 0,06 | -0. 03 03 | -02 | ± 0,02 | -0,08 | -0.10 | -0.09 | ± 0,01 | <0,01 | 3.53 | 0,06 | -0,06 | -02 | -02 | ± 0,02 | ± 0,02 | -0,06 | -0,02 | -01 | ± 0,02 | 0. 85 85 | 0,03 | ||||||||||||||
| ExG 0,26 | 0,11 | 0,18 | ± 0,04 | 0,03 | -0,01 0,01 | ± 0.01 | <0,01 | 3,50 0,26 | 0.14 | 0.14 | 0.02 | ± 0. 04 04 | 0.0.0270 | 0.11 | 0.15 | ± 0,03 | <0,01 | 0.79 | ||||||||||||||||||||||||||||||||||||||||||
| Multispectral | NDVI | 0.51 | 0,15 | 0,35 | ± 0,09 -0,08 | -0,11 -0,10 | ± 0.01 | <0,01 | 4,52 | 0,51 | 0,23 | 0,38 | ± 0,09 | 0,46 | 0. 15 15 | 0.15 | 0.33 | ± 0.10 | 0.31 | 0.31 | 0Ngrdi | 0.23 | -0,04 | -0,08 | ± 0,07 | -0.11 | -0.13 | -0.12 | -0.12 | ± 0,01 | ± 0,01 | <0,01 | 2. 77 77 | 0.23 | 0,03 | 0.12 | ± 0,06 | 0.11 | -0,04 | 0,04 | ± 0,04 | < 0.01 | 0.81 | 0.81 | 5||||||||||||||||
| Exg | 0.28 | 0.28 | 0.10 | 0,18 | ± 0,05 | 0,07 | 0,05 | 0,06 | ± 0,01 | <0.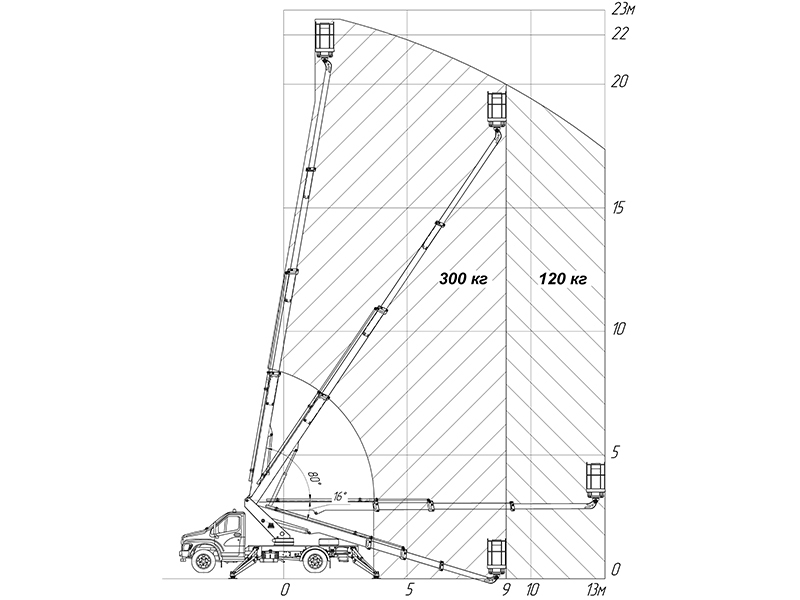 01 01 | 1,91 | 0,28 | 0,13 | 0,22 | ± 0,04 | 0,19 | 0,10 | 0,14 | ± 0.02 | <0,01 | 1,19 | |||||||||||||||||||||||||||||||||||||||
| 100-м | RGB | NGRDI | 0.04 | -0.09 | -0.02 | -0.02 | ± 0,04 | -0,09 | -0,09 | -0. 12 12 | -0.12 | -0.10 | ± 0,01 | <0,01 | 1.67 | -0 0,04 | -0.07 | -0,01 ± 0,04 | 0,04 | -0,09 -0,03 | ± 0,03 0,13 | |||||||||||||||||||||||||||||||||||||||
| ExG 0,23 | 0,05 | 0,14 | ± 0,05 | 0,02 | -0. 0270 0270 | -0.01 | 0,01 | ± 0,01 | ± 0,01 | <0,01 | <0,01 | 2.20 | 0.23 | 0.12 | 0.16 | ± 0,05 | 0,22 | 0.05 | 0,12 ± 0,05 | 0,02 | 0,46 | |||||||||||||||||||||||||||||||||||||||
| Многоспектральный НДВИ | 0,64 0,23 | 0,43 | ± 0,10 -0,13 | -0,16 -0,14 | ± 0,01 | <0,01 | 5. 25 25 | 0.64 | 0.34 | 0.34 | 0.04 | ± 0,09 | 0.56 | 0,23 | 0,39 | ± 0,09 | 0,04 | 0.40 | ||||||||||||||||||||||||||||||||||||||||||
| NGRDI 0,20 | -0,12 0,01 | ± 0,09 -0,21 | -0,24 -0,21 | ± 0. 01 01 | <0,01 | 2,40 | 0,20 | -0.05 | 0,08 | ± 0,07 | ± 0,02 | -0.12 | -0.12 | -0,05 | -0,05 | ± 0,04 | <0,01 | 1.16 | ||||||||||||||||||||||||||||||||||||||||||
| Exg | 0. 23 23 | 0,07 | 0,14 | ± 0,05 | 0,03 | 0,00 | 0,02 | ± 0,01 | <0,01 | 2,28 | 0,23 | 0,12 | 0,18 | ± 0,03 | 0,12 | 0,07 | 0,10 | ±0,02 | <0,01 | 1,90 | ||||||||||||||||||||||||||||||||||||||||
Прежде всего, было важно изучить спектральные различия между растительностью и голой почвой, чтобы определить потенциал для выполнения первого этапа нашего исследования. такой подход должен указывать на значительные различия в спектральных данных обоих классов, указывая, какой набор VI, камер и высот был в состоянии их различать.Все индексы показали значительные различия между растительностью и почвой, и в большинстве случаев М-статистика показала достаточно хорошие результаты, превышающие 2, что является индексом NDVI, который обеспечивает наибольшую спектральную разделимость на трех высотах полета. Это связано с тем, что NDVI подчеркивает спектральную характеристику полосы NIR, которая характеризует силу растительности, и менее чувствительна к фоновым эффектам почвы, чем два других индекса. Величина М-статистики, обычно превышающая 2,5 (за исключением ExG на высоте 30 м и 60 м и мультиспектральной камеры), дает удовлетворительные результаты для высокой устойчивости распознавания растительности во всех сценариях.Кауфман и Ремер (1994) [32] сообщили о значениях М в диапазоне от 1,5 до 0,5 для картирования густой растительности в лесах, тогда как Смит и др.
такой подход должен указывать на значительные различия в спектральных данных обоих классов, указывая, какой набор VI, камер и высот был в состоянии их различать.Все индексы показали значительные различия между растительностью и почвой, и в большинстве случаев М-статистика показала достаточно хорошие результаты, превышающие 2, что является индексом NDVI, который обеспечивает наибольшую спектральную разделимость на трех высотах полета. Это связано с тем, что NDVI подчеркивает спектральную характеристику полосы NIR, которая характеризует силу растительности, и менее чувствительна к фоновым эффектам почвы, чем два других индекса. Величина М-статистики, обычно превышающая 2,5 (за исключением ExG на высоте 30 м и 60 м и мультиспектральной камеры), дает удовлетворительные результаты для высокой устойчивости распознавания растительности во всех сценариях.Кауфман и Ремер (1994) [32] сообщили о значениях М в диапазоне от 1,5 до 0,5 для картирования густой растительности в лесах, тогда как Смит и др. . (2007) [33] получили M значений от 0,24 до 2,18 для картирования выгоревших территорий. Согласно нашим выводам, M достигли гораздо более высокого значения ( M = 8,9 для мультиспектральной камеры и индекса NDVI), что свидетельствует о надежной разделимости классов. NDVI может быть лучшим индексом для выполнения первой фазы предложенной стратегии классификации, хотя NGRDI и ExG также продемонстрировали в целом хорошую способность различать растительный покров, что было бы очень актуально, поскольку камера RGB намного дешевле и проще в использовании, чем камера RGB. мультиспектральная камера.
. (2007) [33] получили M значений от 0,24 до 2,18 для картирования выгоревших территорий. Согласно нашим выводам, M достигли гораздо более высокого значения ( M = 8,9 для мультиспектральной камеры и индекса NDVI), что свидетельствует о надежной разделимости классов. NDVI может быть лучшим индексом для выполнения первой фазы предложенной стратегии классификации, хотя NGRDI и ExG также продемонстрировали в целом хорошую способность различать растительный покров, что было бы очень актуально, поскольку камера RGB намного дешевле и проще в использовании, чем камера RGB. мультиспектральная камера.
Для выполнения второго предложенного этапа необходимо проверить, можно ли различить сорняки и урожай с помощью RGB-камеры или мультиспектрального датчика. В целом, мультиспектральная камера продемонстрировала гораздо более высокую способность различать урожай и сорняки, чем камера RGB. Более высокая производительность мультиспектральной камеры может быть вызвана узкой полосой пропускания сенсора. В этой камере используются фильтры с полосой пропускания 10 нм, что снижает помехи, вызванные другими длинами волн, в то время как камера RGB получает информацию в трех более широких спектральных диапазонах из всего видимого спектра.Таким образом, средние значения NGRDI и ExG существенно не отличались для культур и сорняков на любой высоте полета, а значения М-статистики были самыми низкими, за исключением ExG на высоте 30 м, где M = 1,61. Однако даже на этой высоте значение M-статистики значительно ниже, чем полученное для ExG и мультиспектральной камеры ( M = 3,02). Предварительный вывод может заключаться в том, что камера RGB способна различать сорняки и урожай, используя изображения ExG на высоте 30 м. Тем не менее, один из ключевых вопросов, который необходимо прояснить на данном этапе, состоит в том, чтобы определить, является ли M = 1.61 обеспечивает достаточную надежность для картирования сорняков и сельскохозяйственных культур. Это сомнение можно развеять, если перейти к тому, что показывает существенные спектральные различия между почвой, сорняками и сельскохозяйственными культурами во всех сценариях.
В этой камере используются фильтры с полосой пропускания 10 нм, что снижает помехи, вызванные другими длинами волн, в то время как камера RGB получает информацию в трех более широких спектральных диапазонах из всего видимого спектра.Таким образом, средние значения NGRDI и ExG существенно не отличались для культур и сорняков на любой высоте полета, а значения М-статистики были самыми низкими, за исключением ExG на высоте 30 м, где M = 1,61. Однако даже на этой высоте значение M-статистики значительно ниже, чем полученное для ExG и мультиспектральной камеры ( M = 3,02). Предварительный вывод может заключаться в том, что камера RGB способна различать сорняки и урожай, используя изображения ExG на высоте 30 м. Тем не менее, один из ключевых вопросов, который необходимо прояснить на данном этапе, состоит в том, чтобы определить, является ли M = 1.61 обеспечивает достаточную надежность для картирования сорняков и сельскохозяйственных культур. Это сомнение можно развеять, если перейти к тому, что показывает существенные спектральные различия между почвой, сорняками и сельскохозяйственными культурами во всех сценариях. Обратите внимание, что спектральные различия между почвой, сорняками и посевами на высоте 30 м для камеры ExG и RGB явно значительны; однако диапазон стандартного отклонения (см. точки на ) сорняков и сельскохозяйственных культур вызывает перекрытие, которое может привести к недостаточному различению сорняков и сельскохозяйственных культур. Таким образом, предлагает общий обзор разделения между растительностью и почвой, сорняками и сельскохозяйственными культурами; однако эти результаты необходимо тщательно изучить, соблюдая диапазоны минимальных и максимальных спектральных значений каждого VI () и диапазоны стандартного отклонения ().
Обратите внимание, что спектральные различия между почвой, сорняками и посевами на высоте 30 м для камеры ExG и RGB явно значительны; однако диапазон стандартного отклонения (см. точки на ) сорняков и сельскохозяйственных культур вызывает перекрытие, которое может привести к недостаточному различению сорняков и сельскохозяйственных культур. Таким образом, предлагает общий обзор разделения между растительностью и почвой, сорняками и сельскохозяйственными культурами; однако эти результаты необходимо тщательно изучить, соблюдая диапазоны минимальных и максимальных спектральных значений каждого VI () и диапазоны стандартного отклонения ().
Значения индекса зависят от высоты полета и типа камеры. Внутри группы диаграммы, за которыми следует одна и та же буква, существенно не различаются в соответствии с тестом LSD при P≤0,01.
В мультиспектральной камере NGRDI и ExG значительно различались для сорняков и сельскохозяйственных культур на всех протестированных высотах полета. Тем не менее, несмотря на эти существенные различия, наблюдаемые и как указано выше, M-статистику и следует принимать во внимание, поскольку обе они помогают количественно оценить риск неправильной классификации из-за перекрытия между диапазонами значений изучаемых вегетационных индексов.Например, на высоте 60 м NGRDI показал значительную спектральную разницу для сорняков и сельскохозяйственных культур; однако М-статистика была ниже 1 ( M = 0,81). Это указывает на то, что, помимо значительной спектральной разницы, ожидается плохое разделение между пикселями сорняков и сельскохозяйственных культур. Это можно четко оценить, когда диапазон стандартного отклонения между сорняками и культурой включает перекрытие значений, и это является причиной того, что при значительной спектральной дискриминации этого недостаточно для достижения удовлетворительной разделимости ( M выше 1 ).
Тем не менее, несмотря на эти существенные различия, наблюдаемые и как указано выше, M-статистику и следует принимать во внимание, поскольку обе они помогают количественно оценить риск неправильной классификации из-за перекрытия между диапазонами значений изучаемых вегетационных индексов.Например, на высоте 60 м NGRDI показал значительную спектральную разницу для сорняков и сельскохозяйственных культур; однако М-статистика была ниже 1 ( M = 0,81). Это указывает на то, что, помимо значительной спектральной разницы, ожидается плохое разделение между пикселями сорняков и сельскохозяйственных культур. Это можно четко оценить, когда диапазон стандартного отклонения между сорняками и культурой включает перекрытие значений, и это является причиной того, что при значительной спектральной дискриминации этого недостаточно для достижения удовлетворительной разделимости ( M выше 1 ).
Случай ExG отличается, поскольку этот вегетационный индекс показал значительные спектральные различия и значения M выше 1 на любой высоте полета, хотя M лишь немного превышал 1 ( M = 1,19) на высоте 60 м. . Это указывает на то, что хорошее разделение можно ожидать на расстоянии 30 м и, вероятно, 100 м; однако имеют значительные спектральные различия и M = 1,19, полученные с достаточной разрешающей способностью, чтобы должным образом разделить сельскохозяйственные культуры и сорняки на высоте 60 м?.снова показывает, что эта величина M , вероятно, не так велика, как требуется для успешного достижения этой цели из-за очевидного перекрытия коробчатых участков сорняков и сельскохозяйственных культур, и, следовательно, гораздо более сложное разделение можно было бы ожидать на высоте 60 м. . Единственным индексом, изученным с использованием диапазона NIR, был NDVI, и он не мог отличить урожай от сорняков на любой высоте полета; фактически NDVI показал самые низкие значения М-статистики среди индексов, рассчитанных по мультиспектральной камере.
. Это указывает на то, что хорошее разделение можно ожидать на расстоянии 30 м и, вероятно, 100 м; однако имеют значительные спектральные различия и M = 1,19, полученные с достаточной разрешающей способностью, чтобы должным образом разделить сельскохозяйственные культуры и сорняки на высоте 60 м?.снова показывает, что эта величина M , вероятно, не так велика, как требуется для успешного достижения этой цели из-за очевидного перекрытия коробчатых участков сорняков и сельскохозяйственных культур, и, следовательно, гораздо более сложное разделение можно было бы ожидать на высоте 60 м. . Единственным индексом, изученным с использованием диапазона NIR, был NDVI, и он не мог отличить урожай от сорняков на любой высоте полета; фактически NDVI показал самые низкие значения М-статистики среди индексов, рассчитанных по мультиспектральной камере.
Как упоминалось в предыдущем разделе, а также в соответствии с целью минимизации времени работы и количества сделанных изображений для уменьшения ограничения продолжительности полета БПЛА и мозаичности изображений, оптимальная задача полета может заключаться в захвате изображений на максимально возможной высоте. . Однако самые высокие спектральные различия и значения M пикселей были получены на самых низких высотах, т. е. пиксельные методы могут быть неэффективными для различения сорняков и сельскохозяйственных культур на стадиях всходов на высотах более 30 м из-за спектрального подобия между этими классы растительности.В настоящее время спектральные ограничения могут быть решены путем внедрения передовых алгоритмов, таких как методология объектно-ориентированного анализа изображений (OBIA) [35]. Методология OBIA идентифицирует пространственно и спектрально однородные единицы, называемые объектами , созданными путем группирования смежных пикселей в соответствии с процедурой, известной как сегментация. После этого используются многочисленные особенности локализации, текстуры, близости и иерархических отношений, которые резко повышают успешность классификации изображений [36], [37].На посевных полях на ранней стадии относительное положение растений в рядах посевов, а не их спектральная информация, может быть ключевым признаком их различения.
. Однако самые высокие спектральные различия и значения M пикселей были получены на самых низких высотах, т. е. пиксельные методы могут быть неэффективными для различения сорняков и сельскохозяйственных культур на стадиях всходов на высотах более 30 м из-за спектрального подобия между этими классы растительности.В настоящее время спектральные ограничения могут быть решены путем внедрения передовых алгоритмов, таких как методология объектно-ориентированного анализа изображений (OBIA) [35]. Методология OBIA идентифицирует пространственно и спектрально однородные единицы, называемые объектами , созданными путем группирования смежных пикселей в соответствии с процедурой, известной как сегментация. После этого используются многочисленные особенности локализации, текстуры, близости и иерархических отношений, которые резко повышают успешность классификации изображений [36], [37].На посевных полях на ранней стадии относительное положение растений в рядах посевов, а не их спектральная информация, может быть ключевым признаком их различения. Следовательно, каждое растение, не расположенное в ряду посева, можно считать сорняком. Таким образом, согласно нашим результатам, можно разработать стратегию надежной классификации изображений БПЛА, включающую два этапа: 1) различение растительности (сорняков и сельскохозяйственных культур) от голой почвы с использованием спектральной информации и 2) различение сорняков от рядов посевов с использованием OBIA. методология.Поэтому будущие исследования будут иметь важное значение для определения потенциала методов OBIA для распознавания и картирования сорняков и сельскохозяйственных культур с использованием изображений БПЛА на больших высотах полета, когда сорняки и сельскохозяйственные культуры находятся на ранних фенологических стадиях. Наше недавнее исследование с использованием методологии OBIA показало улучшение использования спутниковых изображений для картографирования сельскохозяйственных культур [38].
[37] или сорняки на поздних фенологических стадиях у озимой пшеницы [12]. Наша гипотеза для дальнейшей работы основана на идее о том, что методология OBIA доказала свою эффективность как мощный и гибкий алгоритм, который можно адаптировать в ряде сельскохозяйственных ситуаций.
Следовательно, каждое растение, не расположенное в ряду посева, можно считать сорняком. Таким образом, согласно нашим результатам, можно разработать стратегию надежной классификации изображений БПЛА, включающую два этапа: 1) различение растительности (сорняков и сельскохозяйственных культур) от голой почвы с использованием спектральной информации и 2) различение сорняков от рядов посевов с использованием OBIA. методология.Поэтому будущие исследования будут иметь важное значение для определения потенциала методов OBIA для распознавания и картирования сорняков и сельскохозяйственных культур с использованием изображений БПЛА на больших высотах полета, когда сорняки и сельскохозяйственные культуры находятся на ранних фенологических стадиях. Наше недавнее исследование с использованием методологии OBIA показало улучшение использования спутниковых изображений для картографирования сельскохозяйственных культур [38].
[37] или сорняки на поздних фенологических стадиях у озимой пшеницы [12]. Наша гипотеза для дальнейшей работы основана на идее о том, что методология OBIA доказала свою эффективность как мощный и гибкий алгоритм, который можно адаптировать в ряде сельскохозяйственных ситуаций. Основная цель будет состоять в том, чтобы различить и нанести на карту ранние сорняки, чтобы улучшить процесс принятия решений для разработки сезонного ESSWM на больших высотах с использованием индекса RGB и ExG по сравнению с многоспектральной камерой и анализом изображений на основе пикселей. Это позволило бы уменьшить количество снимков БПЛА, улучшить характеристики БПЛА (дальность полета и эффективность энергоснабжения) и процесс создания мозаики. Этот подход может быть более выгодным методом для картирования раннего заражения сорняками из-за охвата большей площади посевов и того, что камеры RGB дешевле и экономически более доступны, чем мультиспектральные камеры.Учитывая, что разработка БПЛА требует существенных инвестиций, возможность использования RGB-камер позволит значительно снизить дополнительные затраты.
Основная цель будет состоять в том, чтобы различить и нанести на карту ранние сорняки, чтобы улучшить процесс принятия решений для разработки сезонного ESSWM на больших высотах с использованием индекса RGB и ExG по сравнению с многоспектральной камерой и анализом изображений на основе пикселей. Это позволило бы уменьшить количество снимков БПЛА, улучшить характеристики БПЛА (дальность полета и эффективность энергоснабжения) и процесс создания мозаики. Этот подход может быть более выгодным методом для картирования раннего заражения сорняками из-за охвата большей площади посевов и того, что камеры RGB дешевле и экономически более доступны, чем мультиспектральные камеры.Учитывая, что разработка БПЛА требует существенных инвестиций, возможность использования RGB-камер позволит значительно снизить дополнительные затраты.
Выводы
Сорняки распределены участками внутри посевов, и эта пространственная структура позволяет картировать зараженные и незараженные участки, а гербицидные обработки могут быть разработаны в зависимости от наличия сорняков. Основными задачами этого исследования было развертывание БПЛА, оснащенного либо RBG, либо мультиспектральными камерами, а также анализ технических характеристик и конфигурации БПЛА для создания изображений на разных высотах с высоким спектральным разрешением, необходимым для обнаружения и определения местоположения сорняков. саженцы на поле подсолнечника для дальнейшего применения ESSWM.Благодаря своей гибкости и малой высоте полета БПЛА продемонстрировал способность делать снимки сверхвысокого пространственного разрешения и действовать по запросу в соответствии с запланированным полетным заданием.
Основными задачами этого исследования было развертывание БПЛА, оснащенного либо RBG, либо мультиспектральными камерами, а также анализ технических характеристик и конфигурации БПЛА для создания изображений на разных высотах с высоким спектральным разрешением, необходимым для обнаружения и определения местоположения сорняков. саженцы на поле подсолнечника для дальнейшего применения ESSWM.Благодаря своей гибкости и малой высоте полета БПЛА продемонстрировал способность делать снимки сверхвысокого пространственного разрешения и действовать по запросу в соответствии с запланированным полетным заданием.
Пространственное разрешение изображения, область, покрываемая каждым изображением, и время полета варьировались в зависимости от характеристик камеры и высоты полета. Надлежащее пространственное разрешение определялось в соответствии с каждой конкретной задачей. Пиксель размером менее 4 см рекомендовался для выделения отдельных сорных растений, что соответствовало высоте полета менее 100 м. Если целью было обнаружение сорняков, БПЛА может подняться на большую высоту, чтобы получить удаленные изображения с разрешением 5 см и более. Однако количество изображений, необходимых для охвата всего поля, могло ограничить полетную миссию на меньшей высоте из-за увеличения дальности полета, проблем с энергоснабжением и вычислительной мощностью программного обеспечения для создания мозаики.
Если целью было обнаружение сорняков, БПЛА может подняться на большую высоту, чтобы получить удаленные изображения с разрешением 5 см и более. Однако количество изображений, необходимых для охвата всего поля, могло ограничить полетную миссию на меньшей высоте из-за увеличения дальности полета, проблем с энергоснабжением и вычислительной мощностью программного обеспечения для создания мозаики.
Спектральные различия между сорняками, сельскохозяйственными культурами и голой почвой были значительными для индексов NGRDI и ExG, в основном на высоте 30 м.На больших высотах многие пиксели сорняков и сельскохозяйственных культур имеют схожие спектральные значения, что может увеличить ошибки распознавания. Была получена большая спектральная разделимость между растительностью и обнаженной почвой с индексом NDVI, что предполагает использование мультиспектральных изображений для более надежного различения. В этом случае стратегия улучшения мозаичного изображения и классификации может заключаться в реализации методологии OBIA для включения признаков локализации и близости между сорняками и культурными растениями. Согласование между спектральным и пространственным разрешением необходимо для оптимизации полетной миссии в соответствии с размером более мелких объектов, которые необходимо различить (сорняки или участки сорняков).
Согласование между спектральным и пространственным разрешением необходимо для оптимизации полетной миссии в соответствии с размером более мелких объектов, которые необходимо различить (сорняки или участки сорняков).
Информация и результаты, представленные в данном документе, могут помочь в выборе подходящего датчика и настройке полетной миссии для ESSWM при возделывании подсолнечника и других подобных сценариях междурядья (например, кукурузы, сахарной свеклы, помидоров). Несмотря на первоначальную сложность управления БПЛА, его компонентами и программным обеспечением, а также после периода обучения пилотов и операторов, описанный рабочий процесс можно применять рекурсивно.
Новые стандарты ANSI на 2019 год
Новые стандарты ANSI, выпущенные в декабре 2018 года, распространяются на всех владельцев, операторов и руководителей воздушных подъемников, включая: стрелы, ножничные подъемники и машины для осмотра подмостового пространства. Новые стандарты предназначены для повышения безопасности и приближения североамериканских стандартов оборудования к международным стандартам, что позволяет компаниям и производителям оборудования быть более конкурентоспособными на мировом рынке.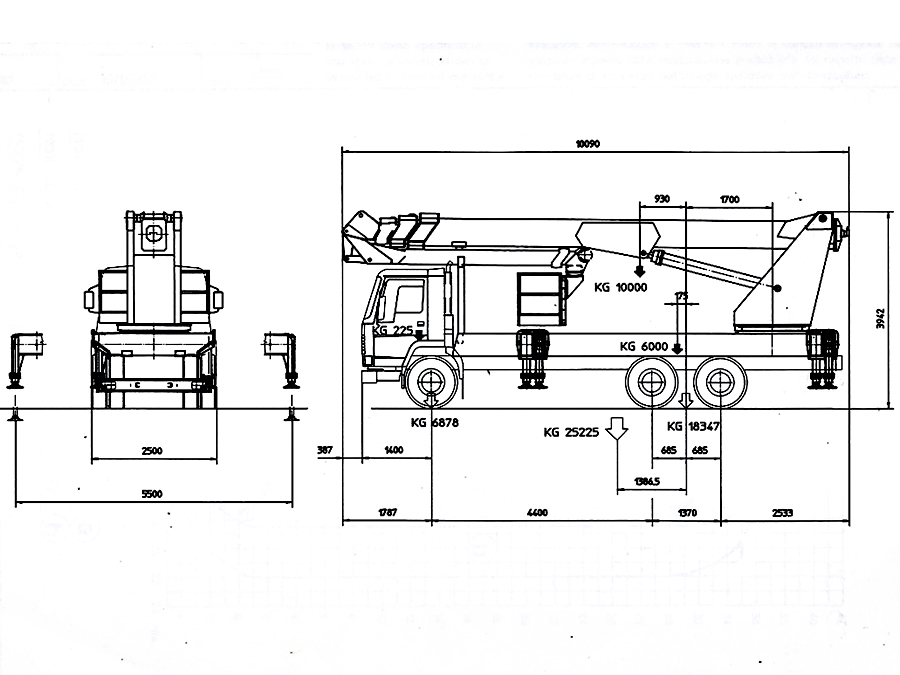
Новые стандарты возлагают большую ответственность на пользователя/владельца оборудования, независимо от того, является ли он крупным предприятием по техническому обслуживанию или малым предприятием, арендующим ножничный подъемник, стреловой подъемник и т. д.для сезонной работы. Работодатели, владельцы и операторы должны выполнить требования до 10 декабря 2019 г. .
Не застигнут врасплох. Узнайте больше о новых стандартах ANSI A92.22 для безопасного использования и стандартах ANSI A92.24 для обучения.
Новые стандарты ANSI — что вам нужно знать
Последние существенные изменения в стандартах ANSI произошли еще в 2006 году. Новые обновления, выпущенные в декабре 2018 года, заменяют стандарты ANSI A92.3, A92.5, A92.6 и A92.8. Новые стандарты ANSI A92 касаются обучения, безопасности на рабочем месте и конструкции оборудования.Существуют также новые классификации оборудования для ножничных подъемников, стреловых подъемников, комплектовщиков и т. д., а также новый класс пользователей: жильцы.
д., а также новый класс пользователей: жильцы.
Классификация MEWP ANSI A92 Подъемные рабочие платформы (AWP)
теперь называются мобильными подъемными рабочими платформами (MEWP). Вместо классификации по типу оборудования машины теперь разбиты на группы, а затем подразделены на типы .
Группы МПРП
– Если МПРП движется вертикально, но в пределах линий опрокидывания, например, ножничный подъемник, он классифицируется как Группа А.
– Если автовышка может двигаться за пределы линий опрокидывания (выносные опоры или колеса), она считается Группой B. Стреловой подъемник является примером оборудования, относящегося к Группе B.
MEWPS далее классифицируются по типам :
Тип 1: оборудование может управляться только с платформой в походном положении Тип 2: оборудование может перемещаться на возвышении, но управляется с шасси Тип 3: оборудование может управляться приподнятый, управляемый с рабочей площадки.
Примеры классификации MEWP ANSI
– Группа A, Тип 1 MEWP : JLG 12 или 15 SP Сборщик запасов с толканиемПодъемная платформа никогда не выходит за пределы шасси, и машину можно перемещать только с убранной платформой.
– Группа A, тип 3 MEWP : электрический ножничный подъемник или приводной комплектовщик
Обе эти машины соответствуют описанию группы A, поскольку платформа никогда не выходит за пределы линии опрокидывания оборудования, а движение можно начать с платформы.
– Группа B, тип 3 MEWP : Стреловые подъемники
Подъемная платформа выходит за пределы колес, и оператор может перемещать машину, находясь на приподнятой рабочей платформе.
Стандарт ANSI A92.22 – Безопасное использование
Все пользователи MEWP, включая как штатных владельцев, так и компании, периодически арендующие воздушное оборудование, должны разработать план оценки рисков и обеспечения безопасности на объекте . План должен быть задокументирован и предоставлен всем на рабочем месте.
План должен быть задокументирован и предоставлен всем на рабочем месте.
Оценка рисков
Эффективная оценка рисков и план обеспечения безопасности должны:
- Включите описание работы, местонахождение и временные рамки
- Определить риски, связанные с использованием автовышки или другого оборудования, а также любые опасные материалы
- Список работников, прошедших обучение
- Включить меры по предотвращению несанкционированного использования МПРП
- Описать безопасные рабочие процедуры и меры безопасности
- Завершить до начала работ
- Используется для выбора лучшего MEWP для работы
- Общий доступ для всех на рабочем месте
- Включите план спасения рабочих в случае падения или поломки автовышки
Планирование спасения
Планирование спасения — один из новых стандартов, на который стоит обратить внимание. План спасения должен включать шаги, которые необходимо предпринять:
План спасения должен включать шаги, которые необходимо предпринять:
- После падения
- Если платформа запуталась
- Если машина выходит из строя
– План должен быть записан, добавлен в учебное пособие компании и доведен до сведения всех рабочих на стройплощадке.
– Любой, кто работает на платформе MEWP или рядом с ней, должен пройти обучение, что делать, если он увидит, как кто-то упал с платформы MEWP, или если он сам упадет.
– В плане должен быть установлен лимит времени, на протяжении которого должным образом закрепленный рабочий может висеть в подвешенном состоянии в воздухе.
– План спасения может включать варианты самоспасения, спасения с помощью или технического спасения (аварийные службы).
Стандарт ANSI A92.24 — Обучение
Документированное обучение остается обязательным для операторов воздушного оборудования. Новый стандарт теперь требует обучения пассажиров и контролеров.
Кто такие обитатели ?
Пассажир — это любое лицо на платформе MEWP, не являющееся оператором. В соответствии с новыми стандартами пассажиры должны пройти обучение по системам защиты от падения и тому, что делать, если оператор больше не может управлять лифтом.
Оператор несет ответственность за то, чтобы каждый Пассажир на платформе знал, как безопасно работать на МПРП. Наконец, на земле должен быть кто-то, кто может выступать в роли Оператора и возвращать поднятых рабочих на землю в случае непредвиденной неисправности или чрезвычайной ситуации.
Изменения в стандартах обучения ANSI для операторов воздушных судовОператоры воздушных подъемников по-прежнему должны иметь документально оформленное обучение, такое как сертификат об окончании или сертификационная карточка. Что нового? В соответствии с новыми стандартами операторы несут ответственность за ознакомление с любым МПРП, с которым они не знакомы, включая:
- Чтение руководства оператора
- Проведение обхода
- Ознакомление с органами управления
- Понимание любых ограничений оборудования
Чтобы наши клиенты могли безопасно пользоваться автоподъемниками, ТМХ проводит обучение и ознакомление со всеми, кто арендует, арендует или покупает у нас автоподъемники.
Требования к обучению супервайзеров ANSI
В соответствии с ANSI A92.24 супервайзером является «организация, назначенная пользователем для контроля за работой оператора и надзора за его работой». Супервайзер ANSI, и любой, кто соответствует этому описанию, теперь должен пройти обучение по технике безопасности при подъеме на высоту. Это требование позволяет супервайзерам снизить ответственность и повысить безопасность, поняв:
- Какой тип MEWP подходит для работы
- Правила, положения и стандарты, применимые к мобильным рабочим платформам, как определено в ANSI A92.22, включая процедуры безопасности, определенные при оценке рисков (описанных выше)
- Опасности, связанные с самосвалами, и способы предотвращения несчастных случаев
- Обеспечение безопасного хранения руководства оператора, легкого доступа и использования его для проверок.
- Подтверждение того, что техники по техническому обслуживанию обучены осмотру и обслуживанию МПРП в соответствии с рекомендациями производителя
Обучение обслуживающего и ремонтного персонала
Обслуживающий персонал должен проводить ежегодные осмотры в дополнение к оценке любого МПРП, введенного в эксплуатацию после простоя в течение трех или более месяцев. Обслуживающий персонал также должен быть обучен работе с любыми новыми функциями нагрузки, такими как сигнализация ограничения нагрузки, датчик наклона и датчик скорости ветра.
Обслуживающий персонал также должен быть обучен работе с любыми новыми функциями нагрузки, такими как сигнализация ограничения нагрузки, датчик наклона и датчик скорости ветра.
Новые стандарты ANSI для проектирования авиационного оборудования
ANSI A92 включает новые требования к производителям оборудования. Нет необходимости в модернизации существующего оборудования для соответствия новым стандартам. Вот краткий обзор того, чего ожидать:
– Все новые MEWP должны иметь закрытый вход на рабочую платформу, цепи больше не разрешены.
— Некоторые модели будут иметь пониженную скорость подъема и погрузки.
— МПРП, используемые на пересеченной местности, должны иметь заполненные пеной или сплошные шины.
– Может быть разработано оборудование только для помещений.
— Минимальная высота поручней платформы оборудования увеличится с 39 до 43,5 дюймов.
Датчики ограничения нагрузки, наклона и скорости ветра
При превышении безопасного предела нагрузки подается звуковой сигнал, и датчик препятствует нормальной работе. Точно так же все новое оборудование будет поставляться с сигнализацией датчика наклона и системой отключения функций стрелы, если машина превышает предельные значения уклона.МПРП, предназначенные для использования на открытом воздухе, будут использовать датчик скорости ветра для снижения грузоподъемности и повышения безопасности в ветреную погоду.
Точно так же все новое оборудование будет поставляться с сигнализацией датчика наклона и системой отключения функций стрелы, если машина превышает предельные значения уклона.МПРП, предназначенные для использования на открытом воздухе, будут использовать датчик скорости ветра для снижения грузоподъемности и повышения безопасности в ветреную погоду.
Чувствуете себя подавленным?
Вы не одиноки. Мы можем помочь. Для комплексной оценки или разовых вопросов о стандартах ANSI обращайтесь к нам через Интернет или по телефону.
Убедитесь, что ваш персонал и оборудование находятся в рабочем состоянии
Мы предлагаем обучение полетам на месте на вашем объекте с использованием вашего оборудования.Не откладывайте, владельцы и операторы воздушного оборудования должны соответствовать стандарту ANSI до 10 декабря 2019 года.
East Bay – Livermore (510) 675-0500
Freesno (559) 834-9500
Sacramento (916) 376-0500 (931) Salinas (831) 757-1091
Дополнительная литература
Спайдерные подъемники – наступающий сектор
Существует большая активность в секторе гусеничных платформ и спайдерных подъемников. ИИ собирает информацию о последних выпусках и планах производителей.
ИИ собирает информацию о последних выпусках и планах производителей.
Сектор гусеничных платформ, или подъемников-пауков, как их обычно называют, продолжает развиваться благодаря множеству новых моделей и не менее впечатляющему ассортименту будущих продуктов. Этот тип продукта всегда подходил для гибридных и электрических вариантов, и это область, которая совершенствуется и развивается. Это одна из самых больших проблем в этом секторе; это сочетание большей производительности на еще более компактном и легком шасси.
Вскоре будет запущен Hinowa TC22.Последним оборудованием от Hinowa является TeleCrawler TC13 N и TC13 S. Версия N (узкая) была запущена в апреле 2020 года, а версия S (стандартная) была представлена ранее в этом году.
Уникальной особенностью первой телескопической гусеничной платформы Hinowa является полностью электрический привод. Ходовая часть сконструирована с использованием тяговых электродвигателей, что позволяет ей двигаться только за счет электроэнергии, без использования гидравлического масла.
В четвертом квартале 2021 года Hinowa выпустит вторую модель в линейке — TeleCrawler TC22.Он также будет доступен в двух версиях: TC22N и TC22S. Легкая модель весом менее 3 тонн может достигать рабочей высоты 22 м и вылета стрелы до 12,5 м.
Он будет предлагать три различных варианта привода: дизельный двигатель Kubota + электрический двигатель 230 В, двухэнергетический привод (дизельный двигатель Kubota Z602 + литий-ионный аккумулятор) и полностью электрическая версия. Кроме того, все модели оснащены автоматическим управлением выдвижением телескопической стрелы заподлицо, а также функциями Go Home и Go Back.
Давиде Фракка, вице-президент по продажам и маркетингу компании Hinowa, говорит, что самой большой тенденцией в отрасли является переход к легким, компактным машинам с более совершенными технологиями. «Компании по аренде должны быть максимально гибкими, адаптируясь ко всем рабочим ситуациям своих клиентов. Поэтому они проявляют большой интерес к технологичным, экологичным и удобным в использовании автовышкам, которые могут быть оснащены различными силовыми установками».
Сокол первый
Что касается компактного ракурса, в январе компания Falcon Lifts представила линейку подъемников, которые она называет «маленькими».Модели варьируются от 13 м до 27 м, установлены на гусеницах, с шарнирными Z-образными стрелами. Эта серия дополняет диапазон рабочих высот производителя от 13 до 52 метров.
Новый модельный ряд предлагает двойной источник питания, доступный с литиевым блоком питания в качестве опции, и достаточно компактен, чтобы проходить через одинарные двери, и достаточно легок, чтобы перемещаться по чувствительным полам. Оснащен системой удаленного доступа через GSM, есть онлайн сервисная поддержка от сервисной команды Falcon.
Следующей будет 43-метровая модель на шасси Falcon Vario, предлагающая одногусеничную систему, увеличенную рабочую высоту и боковой вылет.Кроме того, во втором квартале этого года на шасси Vario будет запущен 38-метровый Falcon с увеличенной нагрузкой на корзину 450 кг. В-третьих, новая разработка будет представлена в конце года. Информация об этом появится в ближайшее время.
В-третьих, новая разработка будет представлена в конце года. Информация об этом появится в ближайшее время.
Falcon Lifts всегда предлагала гибридные машины с двойным питанием: аккумуляторы и двигатель внутреннего сгорания. «Но некоторые рынки/клиенты проявляют повышенный интерес к чисто электрической и литиевой энергии, — говорит Брайан Фальк-Шмидт, директор по продажам Falcon, — особенно к лифтам, которые предназначены для использования в городах с ограничениями по выбросам».
Помимо нулевых выбросов, Шмидт видит возможности в более легких и универсальных устройствах для работы как в помещении, так и на открытом воздухе, а также в увеличении нагрузки на корзину до минимума 250 кг.
Новый RA24 от Easy LiftКомпактность
Easy Lift также стал компактнее. По словам компании, RA24 — это «очень компактный паук», с двойным пантографом, который отличается от всех других моделей текущего модельного ряда. Это также очень простая машина с гидравлическим приводом, грузоподъемностью 230 кг и неограниченной рабочей схемой.
Новый RA24 может достигать рабочей высоты 23,5 м и вылета стрелы 12 м с 230 кг в корзине. Размер выносной опоры составляет 2,5 м. В стандартной комплектации он оснащен выдвижными гусеницами, поворотом корзины на 80°+80° и радиоуправлением Scanreco. При одинаково компактной длине 5,2 м без корзины, высоте 2 м и ширине 0,9 м, он доступен с дизельным двигателем Kubota и электрическим двигателем переменного тока 110 В или 220 В, а также в гибридной версии с добавлением литиевой батареи.
Компания также проводит рестайлинг своей небольшой линейки крестовин с 13 до 18 м, а также телескопической линейки с 26 до 42 м.Кроме того, Easy Lift представляет платформу с двойным пантографом средней высоты RA24, чтобы удовлетворить спрос на этот тип продукции. В то время как, с другой стороны, спрос на подъемники с крестовиной выше 42 м остается ограниченным на таких рынках, как Китай, Индия или ОАЭ, он становится достаточно высоким, поэтому компания решила представить подъемник с рабочей высотой более 42 м.
«Сегодня наш сектор сталкивается с серьезными проблемами, — говорит директор по продажам Easy Lift Мануэла Вендер, — поскольку компания пытается удовлетворить некоторые возникающие потребности, такие как спрос на более развитую программу экологической устойчивости.«Клиентам нужны платформы, которые могут сочетать более высокую эффективность работы с уменьшенным потреблением энергии. Мы убеждены, что рыночный спрос на платформы с батарейным питанием или даже на гибридные платформы будет расти».
По этой причине компания уже предлагает все свои модели в аккумуляторной версии (BA) или гибридной версии (HY), сочетающей в себе три источника питания; двигатель внутреннего сгорания, электродвигатель и литиевая батарея.
Клиенты также нуждаются во все большем количестве настраиваемых платформ, чтобы сделать их более гибкими для различных приложений, при этом заметным требованием являются лебедки.Вот почему компания Easy Lift внедрила лебедку с грузоподъемностью 500 кг для своих моделей R260, R300, R360 и R420, а также лебедку с грузоподъемностью 230 кг для RA31 и RA24, которая скоро будет выпущена.
Лебедка поднимается
Платформенная корзина Spider 43T, оснащенная лебедкой. Платформенная корзинатакже расширила ассортимент лебедок, добавив дополнительную лебедку грузоподъемностью 250 кг для моделей Spider 22.10 с рабочей высотой 22 м и Spider 27.14 с рабочей высотой 27 м.
Корзины агрегатов можно заменить вместе с лебедкой за считанные минуты и за несколько простых шагов, заявляет производитель.
Стремясь к более экологичным решениям, Platform Basket переходит на ионно-литиевые батареи, заменяя более традиционные свинцово-кислотные батареи. «Это решение приносит пользу не только с точки зрения экологии, но и с точки зрения габаритов и универсальности», — говорят в компании.
В дополнение к своему текущему ассортименту гусеничных продуктов компания вскоре выпустит модель Spider 39T с телескопической стрелой, оснащенную выдвижными гусеницами и простым и интуитивно понятным пультом дистанционного управления.
При максимальной рабочей высоте 39 м Spider 39T будет доступен в стандартной и гибридной версиях. Его дистанционное управление и двойная скорость движения дополняют автоматическую стабилизацию. Кроме того, стрелы втягиваются в профиль шасси для работы в узких местах.
Его дистанционное управление и двойная скорость движения дополняют автоматическую стабилизацию. Кроме того, стрелы втягиваются в профиль шасси для работы в узких местах.
Как добавляет Patform Basket, платформа спроектирована так, чтобы быть чрезвычайно устойчивой и легко транспортируемой, а вместе с ее компактными размерами и резиновыми гусеницами делает ее идеальной для обрезки деревьев, работ по техническому обслуживанию, покраске и других работ, которые труднодоступны для традиционной воздушной техники. платформы.
В последние годы компания Platform Basket также вложила средства в усовершенствование своих систем удаленной диагностики, которые уже предлагаются в качестве опции для ее пауков и оборудования для железнодорожных дивизий.
Новая система Platform Basket Telematics (PBT) состоит из оборудования, содержащего встроенную SIM-карту для международных данных, которая отправляет все важные данные машины на облачную платформу. Информация включает в себя геолокацию, рабочие часы и скорость, данные тензодатчика и активные или предыдущие сигналы тревоги. Программное обеспечение предоставляет специальный веб-портал с защищенным доступом к данным, сохраненным в облаке.
Программное обеспечение предоставляет специальный веб-портал с защищенным доступом к данным, сохраненным в облаке.
Даже при отсутствии покрытия, например, при работе оборудования в тоннелях, данные сохраняются на встроенной карте памяти и отправляются в облако при восстановлении сигнала.
Линия расширения
TZX-250 от Palazzani — самый большой в линейке TZX.Palazzani Industrie расширяет ассортимент лебедок и моделей. Новая лебедка большой грузоподъемности для крестовинного подъемника XTJ 52+ является последним предложением компании. Недавно разработанная гидравлическая лебедка с максимальной грузоподъемностью 980 кг предлагает увеличение по сравнению со стандартной лебедкой модели грузоподъемностью 500 кг.
Опция позволяет операторам заменить 400-килограммовую корзину модели на лебедку, чтобы превратить модель из спайдер-подъемника в спайдер-кран.
Palazzani также расширяет спектр рабочей высоты в своей серии TZX, предлагая модель с рабочей высотой 25 м. TZX 250 является самым высоким в семействе крестовинных подъемников TZX, высота которого составляет от 17 м, а стрела имеет шарнирно-сочлененную и телескопическую конфигурацию.
TZX 250 является самым высоким в семействе крестовинных подъемников TZX, высота которого составляет от 17 м, а стрела имеет шарнирно-сочлененную и телескопическую конфигурацию.
Система стрел разработана таким образом, чтобы обеспечивать маневренность в воздухе и ощущение стабильности в корзине благодаря алюминиевой конструкции и секциям стрел размером выше среднего.Рабочая высота 25 м доступна без ограничений по всей рабочей зоне и обеспечивает максимальный вылет стрелы 10,6 м при малом рабочем весе 2660 кг.
Разработанная, чтобы быть очень компактной в транспортном режиме, модель имеет длину 5,123 м, ширину 980 мм и высоту 1921 мм в сочетании с минимальной шириной установки 2840 мм.
Опускание стабилизаторовосуществляется с помощью ручной или автоматической системы, в зависимости от потребностей, с возможностью двойной широкой и узкой установки на уклонах до 19%.
По словам производителя, низкий центр тяжести обеспечивает превосходную устойчивость, что означает возможность движения по неровной поверхности или склонам, до 23 % в гусеничной версии или 21 % в колесной версии. Стандартная корзина 1400×700 мм, вместимостью на одного или двух человек, на 120 кг или 200 кг,
Стандартная корзина 1400×700 мм, вместимостью на одного или двух человек, на 120 кг или 200 кг,
Компания предлагает полный спектр электрических и гибридных вариантов, включая стандартный двухэнергетический вариант питания, экологически чистый электрический (переменный ток + постоянный ток) с нулевым уровнем выбросов и гибридный вариант (дизель + постоянный ток).Предыдущая гибридная система компании теперь заменена системой Gen2Hybrid, которая настраивает оптимальную комбинацию дизельного двигателя и электродвигателя во время работы машины.
Но помимо продолжающихся разработок в этой области, выбор материала становится все более важным для достижения легкости, прочности и безопасности
«Большая проблема также связана с технологиями», — добавляет представитель Palazzani, поскольку взаимосвязь с машиной для удаленного доступа, диагностики и телематики становится все более важной.«Наши машины за последние годы пережили технологическую революцию». Это включает в себя сенсорный экран в корзине, предоставляющий информацию и диагностику, в сочетании с Palconnect для отслеживания машины и получения предупреждений о техническом обслуживании. В дополнение к этому в 2020 году было запущено веб-приложение Mypalazzani, которое предоставляет немедленную и бесплатную информацию о машине с любого устройства со всеми операционными системами.
В дополнение к этому в 2020 году было запущено веб-приложение Mypalazzani, которое предоставляет немедленную и бесплатную информацию о машине с любого устройства со всеми операционными системами.
Palazzani работает над дизайном новых моделей, которые должны быть запущены к концу этого или началу следующего года.Более подробная информация о новых моделях будет представлена на более продвинутом этапе проектирования.
В этом году Oil & Steel расширяет свой ассортимент новой серией Octoplus.Стандартный гибрид
Компания Oil & Steel считает, что полностью электрические агрегаты становятся все более распространенными, особенно на высоте менее 21 м. В качестве расширения этого гибриды станут стандартом в ближайшем будущем для диапазонов высот от 25 до 30 м с рабочей высотой, а литий-ионные батареи уже являются эталоном для полностью электрических МПРП.
Совсем недавно производитель выпустил Octopus 23 и изолированную версию Octopus 23 I на 46 кВ. Он имеет корзину из стекловолокна с вкладышем и третью секцию стрелы из стекловолокна. ассортимент также пополнился легким 1800-килограммовым рестайлинговым Octopus 14 с новыми гидравлическими и электронными компонентами для повышения надежности, чувствительности органов управления и производительности. Модель имеет небольшую опорную поверхность размером 2,7 м x 2,7 м.
Он имеет корзину из стекловолокна с вкладышем и третью секцию стрелы из стекловолокна. ассортимент также пополнился легким 1800-килограммовым рестайлинговым Octopus 14 с новыми гидравлическими и электронными компонентами для повышения надежности, чувствительности органов управления и производительности. Модель имеет небольшую опорную поверхность размером 2,7 м x 2,7 м.
Для Octopus 23 и Octopus 14 рестайлинг доступна полностью электрическая версия с литиевым аккумулятором с 8-часовой автономной работой.
Следующей моделью будет новый легкий компактный гусеничный модельный ряд под названием Oxctoplus. В этом году он будет включать в себя модели с рабочей высотой 21 и 17 м, а в 2022 году появится версия с 13-метровой высотой. Особенности новой линейки включают 20-градусную стрелу Plus, высоту стабилизации более 550 мм и цветной дисплей.
Производитель считает, что в будущем пользователям потребуются более интегрированные инструменты для работы на высоте, например, подъемник для подъема материалов и расширенный пользовательский интерфейс в машине.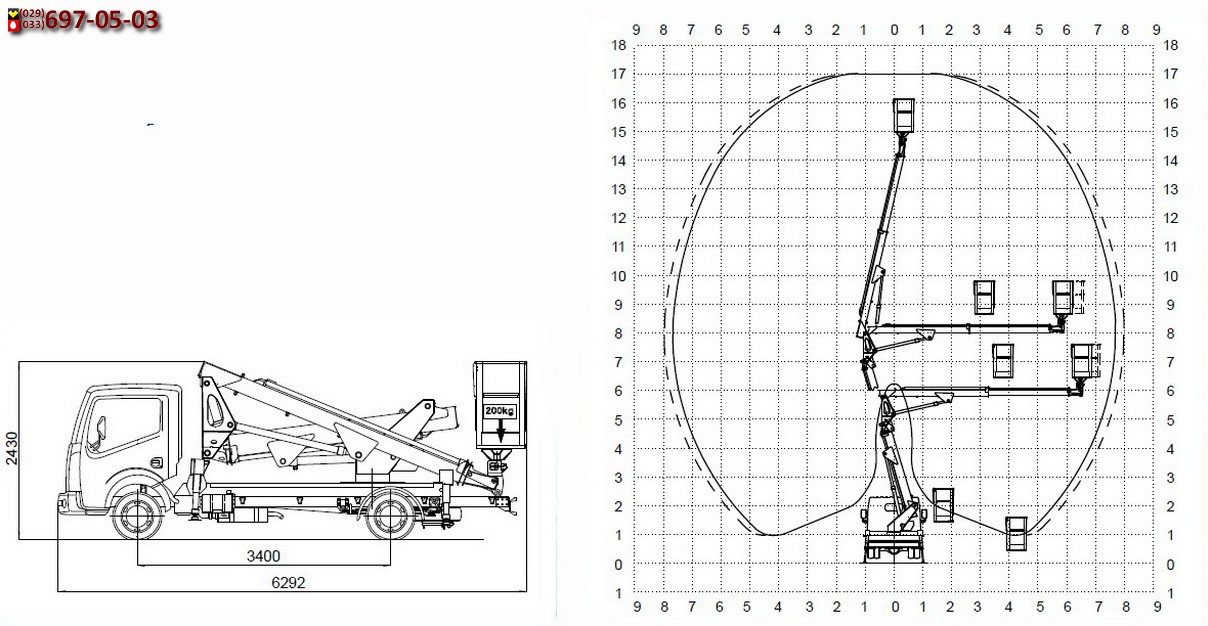
Проблемы с пропускной способностью
Последнее предложение Imerбыло впервые представлено в июне 2020 года. Производство и поставки IM R 15 DA начались в начале января 2021 года. Особенности включают двойную шарнирную стрелу, одинарную рабочую схему с грузоподъемностью 230 кг, компактные размеры и полный спектр бензиновых, дизельных двигателей. и электрические версии. К концу второго квартала 2021 года также будут доступны литиевые батареи.
В этом году также будет представлена еще одна модель гусеничного модельного ряда, модель с рабочей высотой 23 м, компактными размерами, малым весом и переменной площадью стабилизации.
Что касается гибридных и электрических дебатов, как говорит Паоло Пьяниджиани, коммерческий директор Imer access, полностью электрические продукты с батарейным питанием представляют собой ограниченную нишу, в основном ориентированную на использование внутри помещений. «Гибридные модели развиваются как альтернатива классическому двухэнергетическому эндотермическому двигателю и электродвигателю с питанием от сети, обеспечивая экологичную, хотя и ограниченную, рабочую способность».
Pianigiani соглашается с тем, что одна из самых больших проблем заключается в сочетании классических рабочих характеристик, таких как рабочая высота и грузоподъемность, с уменьшенным весом, компактными размерами и двойным источником питания со всеми соответствующими ограничениями по размеру.«Гусеничные платформы активно развиваются на различных рынках благодаря гибкости их использования. Две основные линии претерпели сильное развитие: так называемые пауки и самоходные стрелы, а в последнее время ножничные подъемники, два сектора и два применения, в основном характеризующиеся их собственным весом».
Расширяющаяся линейка CTE Traccess, представленная здесь Traccess 200Более высокая цель
После двух последних запусков CTE, Traccess 200 и CTE Traccess 160, запущенных в 2019 и декабре 2020 года соответственно, планируется подняться выше с Traccess 270.
В то время как Traccess 200 концептуально очень прост, имеет неограниченную рабочую зону при максимальной нагрузке, с системой CanBus, проводной тяговой консолью и фиксированными элементами управления корзиной, Traccess 160 является одним из самых совершенных спайдерлифтов на рынке с беспроводной связью 2,4 ГГц. пульт дистанционного управления, цветной диагностический дисплей, автоматическая стабилизация, функция «дом» в сочетании с неограниченной работой на полную мощность.
пульт дистанционного управления, цветной диагностический дисплей, автоматическая стабилизация, функция «дом» в сочетании с неограниченной работой на полную мощность.
Следующий 27-метровый Traccess 270 с рабочей высотой будет оснащен усовершенствованной системой стабилизации S3 (Smart Stability System), а также автоматической стабилизацией из корзины, функцией Home, двойными консолями, встроенным графическим дисплеем и полными пропорциональными маневрами.Дополнениями станут гибридный аккумулятор и съемная корзина на колесиках для доступа через стандартные двери.
Роберто Берритта, менеджер CTE по техническим продуктам и инновациям, говорит, что гибридная мощность становится наиболее важной характеристикой спайдерных подъемников. По этой причине новый Traccess 270 будет оснащен аккумуляторной батареей в паре с электронасосом низкого напряжения переменного тока с интеллектуальным управлением питанием, который также может питаться от сети переменного тока, для экологически чистой и бесшумной работы внутри помещений.
«Индустрия пауков по-прежнему является нишевым рынком, который быстро растет, хотя его рост замедляется из-за потребности в транспортном средстве для доставки устройства к месту работы», — говорит Берритта.«Индустрия ухода за деревьями также является растущим рынком для использования вне помещений, хотя это представляет собой инженерную проблему, поскольку устройства могут часто нарушать стандарты проектирования с опасными последствиями. В целом, рынок спайдер-подъемников может предложить возможность заменить другие средства работы, такие как строительные леса, лестницы и даже небольшие краны, в труднодоступных местах».
Более простое обслуживание
CMC продолжает расширять свой ассортимент Недавно CMC добавила в свой ассортимент четырех новых пауков; три из них полностью гидравлические, которые создали совершенно новое семейство продуктов, F-Series.Три полностью гидравлические модели, S13F, S15F и S18, были представлены на выставке Bauma 2019. Модель S23, которая завершила эту серию легких и компактных машин, была представлена позже в том же году на выставке GIS 2019 в Пьяченце, Италия, и является гораздо более сложной, чем остальные три.
Модель S23, которая завершила эту серию легких и компактных машин, была представлена позже в том же году на выставке GIS 2019 в Пьяченце, Италия, и является гораздо более сложной, чем остальные три.
Алессандро Мастрогиакомо, менеджер по экспорту CMC, говорит, что серия F была разработана с определенной целью. «Сделать эти машины максимально простыми и долговечными. «Поскольку они полностью гидравлические, они не имеют джойстика или сложной электрической системы, поэтому их намного проще обслуживать, чем в среднем.Все три из них маневренны с помощью гидравлических рычагов, как с земли, так и в корзине».
Компания работает над новым изолированным 23-метровым спайдер-подъемником, который выйдет на рынок во втором квартале 2021 года. Но в данный момент мы не можем сказать больше.
Гибкость — ключ к современным машинам, — говорит Мастрогиакомо. «В нашем отделе исследований и разработок мы пытались мечтать о более легких машинах, мощных с точки зрения охвата, которые могут работать в еще большем количестве приложений, чем в прошлом, в стремлении сделать одну машину подходящей практически для любой работы, о которой вы только можете подумать.
Mastrogiacomo добавляет: «Рынок подъемников с крестовиной быстро растет, и на то есть веские причины. Подъемники Spider являются универсальными продуктами: благодаря своим компактным размерам они являются лучшим решением для доступа в узкие пространства как внутри, так и снаружи. Кроме того, низкоуровневая секция позволяет перевозить небольшие прицепы, что расширяет возможности их использования. Всего одним предложением: в то время как спайдерный подъемник может выполнять ту же работу, что и автомобильный или самоходный подъемник, обратное неверно.
Leguan 135 NEO на техническом обслуживанииИнтуитивное управление
Leguan Lift 190 был впервые выпущен в 2017 году, а в 2021 году появилось обновление для лесоводов с усиленной защитой стрел и органов управления, а также с новым сервисным дисплеем.
Leguan 190 спроектирован так, чтобы обеспечить максимальный вылет и возможности подъема и перемещения, что делает его идеальным для ухода за деревьями. Шасси и стрелы хорошо защищены от падающих ветвей, а устойчивая гусеничная база с высоким дорожным просветом позволяет безопасно и быстро двигаться по любой местности.
Шасси и стрелы хорошо защищены от падающих ветвей, а устойчивая гусеничная база с высоким дорожным просветом позволяет безопасно и быстро двигаться по любой местности.
Еще одна модель, Leguan 135 NEO, была выпущена в 2019 году. Интуитивно понятное управление с помощью джойстика позволяет одновременно управлять несколькими движениями стрелы одной рукой. Для управления платформой используется тот же джойстик, но в качестве опции доступно дистанционное управление. Настройка проста благодаря функции автоматического выравнивания, а управление спайдер-подъемником эффективно благодаря функциям исходного положения и обратно в рабочее положение.
Компания инвестирует в разработку продукции, чтобы представить новые модели в ближайшие годы, чтобы расширить возможности, особенно для индустрии ухода за деревьями по всему миру.
Что касается вариантов аккумуляторов, Leguan говорит, что большинство его лифтов используются снаружи, часто вне досягаемости зарядных станций, а это означает, что литиевые аккумуляторы пока не подходят для большинства клиентов.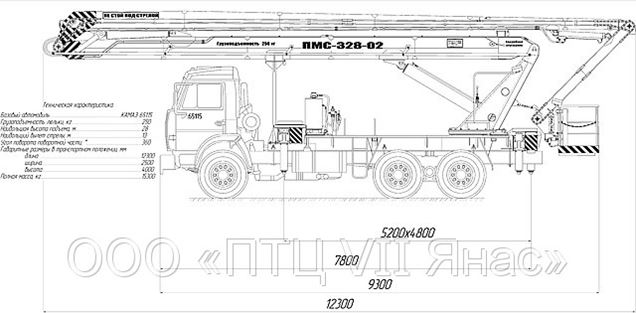 Все спайдер-подъемники доступны в гибридном исполнении с энергосберегающими бензиновыми/дизельными двигателями и электродвигателями 110/230 В. Йори Мюллери, вице-президент по продажам и маркетингу, говорит: «Мы ожидаем постоянного роста спроса на спайдерные подъемники из-за изменений в местных правилах, которые поощряют использование безопасных и компактных гусеничных платформ вместо традиционных способов их выполнения.
Все спайдер-подъемники доступны в гибридном исполнении с энергосберегающими бензиновыми/дизельными двигателями и электродвигателями 110/230 В. Йори Мюллери, вице-президент по продажам и маркетингу, говорит: «Мы ожидаем постоянного роста спроса на спайдерные подъемники из-за изменений в местных правилах, которые поощряют использование безопасных и компактных гусеничных платформ вместо традиционных способов их выполнения.
ИЗОЛИРОВАННЫЕ КАТЕРЫ Новый LEO86SiC от Teupen с изоляцией до 46 кВ. Teupen Maschinenbau выходит на европейский рынок теплоизоляционных материалов со своей первой моделью LEO86SiC. Платформа, запущенная в прошлом году на рынок США, имеет изоляцию до 46 кВ (категория C). Он имеет максимальную рабочую высоту 28 м и боковой вылет 14,5 м. Благодаря гидравлически регулируемым гусеницам его можно использовать на труднопроходимой пересеченной местности. Пульт дистанционного радиоуправления с цветовой маркировкой обеспечивает простое и интуитивно понятное управление. Ommelift выпускает новый изолированный подъемник 2650 iRX-46kV. Платформа имеет изоляцию категории С и предназначена для работы вблизи линий электропередач. Все стрелы изолированы секциями из стекловолокна Waco, что обеспечивает безопасную и маневренную работу. 2650 iRX-46kV также соответствует стандарту US ANSI A92.2. Ommelift 2650 iRX также имеет изоляцию категории C.Модель 2650 iRX-46kV имеет рабочую высоту 26,5 м и неограниченный вылет стрелы 12,2 м. Двойной параллелограммный шарнирный стояк обеспечивает 13-метровый свободный ход и обеспечивает вертикальное отслеживание стены.Особенности также включают гидравлический контур для крепления пилы и поворот корзины на 180°. Благодаря телескопической секции, работающей на роликах, в телескопических движениях отсутствует трение о полки скольжения, что обеспечивает одинаковую скорость работы при полной загрузке корзины во всех положениях. Модель обладает мощной проходимостью по бездорожью и усиленным защитным пакетом. Стандартная версия модели 2650 iRX представляет собой настоящий дизельно-аккумуляторный гибрид с подзарядкой аккумуляторной батареи от двигателя. |
 Другие модели будут выпущены в ближайшее время.
Другие модели будут выпущены в ближайшее время.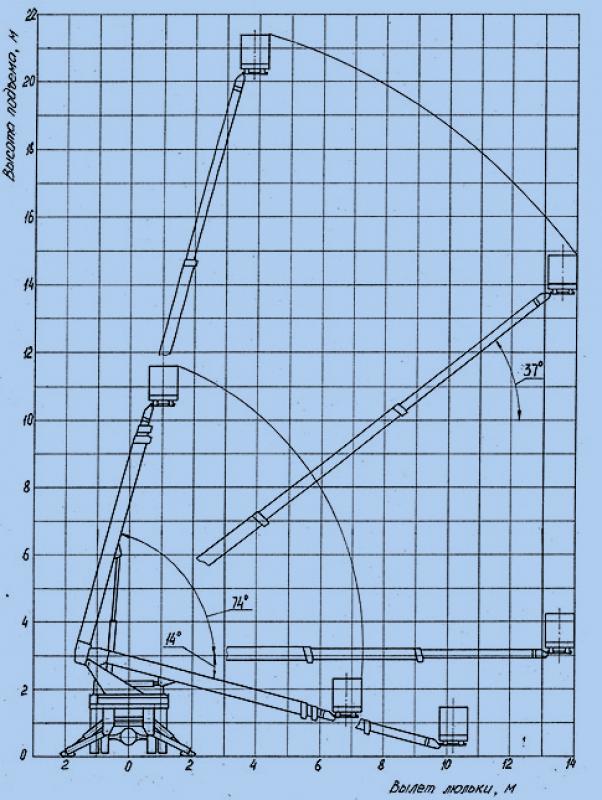 Стабилизаторы позволяют устанавливать машину на неровностях до 40%. Простое и интуитивно понятное многофункциональное управление подъемником с помощью радиоконтроллера облегчает обучение оператора и ускоряет работу.
Стабилизаторы позволяют устанавливать машину на неровностях до 40%. Простое и интуитивно понятное многофункциональное управление подъемником с помощью радиоконтроллера облегчает обучение оператора и ускоряет работу.РАСШИРЕНИЕ ДОРОЖЕК Сокадж 18SSocage наиболее известна своими креплениями для грузовиков, но вышла на рынок шпилевых подъемников. 18S, гусеничная платформа, которая может обеспечить рабочую высоту до 18,3 м и 8,2 м, является ее текущим предложением. Это модель с двойным пантографом, с телескопической стрелой и гуськом.Изменяемая ходовая часть позволяет двигаться по склонам до 16°. Его умеренная ширина 800 мм, без корзины, и высота 1995 мм позволяют проходить через небольшой вход, как стандартные дверные проемы. Основная особенность – поворот башни на 400° с единой зоной стабилизации. Далее компания запустит 21S; режим рабочей высоты 21 м с теми же функциями, что и 18S.Оба оснащены электродвигателем на 220 В, и компания изучает потенциальную гибридную версию. |
 В стандартной комплектации предлагает автоматическое закрывание, автоматическую стабилизацию и три скорости перемещения гусеницы.
В стандартной комплектации предлагает автоматическое закрывание, автоматическую стабилизацию и три скорости перемещения гусеницы.ИСТОРИЧЕСКИЕ ОБНОВЛЕНИЯ Для французской компании ATN модельный ряд Le Piaf пополнится следующей эволюцией гусеничных машин. Первоначальная конструкция Le Piaf, изготовленная компанией ATN Platforms 20 лет назад, представляет собой вертикальную мачту с электрическим приводом на гусеницах. АТН Мигале 23 С тех пор появилось несколько эволюций продукта, но основные преимущества остаются неизменными.Это способности пересеченной местности, очень низкое давление на грунт и немедленная передача. К нему будет добавлена новая аккумуляторная технология, обеспечивающая точечную зарядку, а также бортовой генератор для увеличения автономности машины для ландшафтного дизайна и строительства на открытом воздухе. В 2015 году представлена вторая линейка гусеничных машин; на этот раз в категории спайдер-лифта. Через три года за пауком Mygale 23 последовал Mygale 23 V2. Машины отличаются от других платформ-пауков тем, что в них используется система подъема с двойным телескопом.Главным преимуществом является возможность подняться с земли на 23 метра за 90 секунд. Удобное управление и автоматическое выравнивание также являются функциями. «Двойная энергия на платформах-пауках является почти стандартным и, скорее всего, наиболее эффективным источником энергии. Медленно запускаются машины с питанием от литиевых батарей, но цена выше, а универсальность гораздо меньше», — сказал производитель. С точки зрения ATN, двойное энергетическое решение сочетает в себе преимущества обоих. |

Добавить комментарий